ROS移动机器人——ROS基础知识与编程
此文章基于冰达机器人进行笔记整理,使用的环境为其配套环境,可结合之前的ROS,赵虚左老师的文章结合进行观看,后期也会进行整合
同时建议观看cn/ROS/Tutorials - ROS Wiki
官方教程
1. ROS安装
(1)配置ubuntu的软件和更新,允许安装不经认证的软件。
首先打开“软件和更新”对话框,具体可以在 Ubuntu 搜索按钮中搜索,确保勾选了"restricted", "universe," 和 "multiverse."
(2)设置安装源
来自国内中科大的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
(3)设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
(4)安装
首先需要更新 apt(以前是 apt-get, 官方建议使用 apt 而非 apt-get),apt 是用于从互联网仓库搜索、安装、升级、卸载软件或操作系统的工具。
sudo apt update
然后,再安装所需类型的 ROS:ROS 多个类型:Desktop-Full、Desktop、ROS-Base。这里介绍较为常用的Desktop-Full(官方推荐)安装: ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators, navigation and 2D/3D perception
sudo apt install ros-melodic-desktop-full
(5)配置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
(6)安装依赖
依赖相关工具
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
安装rosdep
sudo apt install python-rosdep
初始化rosdep
sudo rosdep init
rosdep update
(7) sudo rosdep init初始化失败的解决办法

2. ROS通信结构

ROS的通信结构是在OS层之上,通过TCP/IP协议协议实现
节点NODE与主节点Master
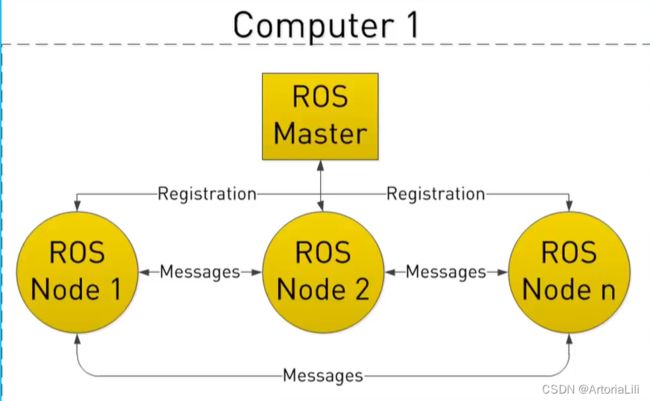
master:相当于管理中心,node也需要现在master进行注册,node的通信也是由master进行引线,才能进行通信,一个ros计算图里只能有一个master。
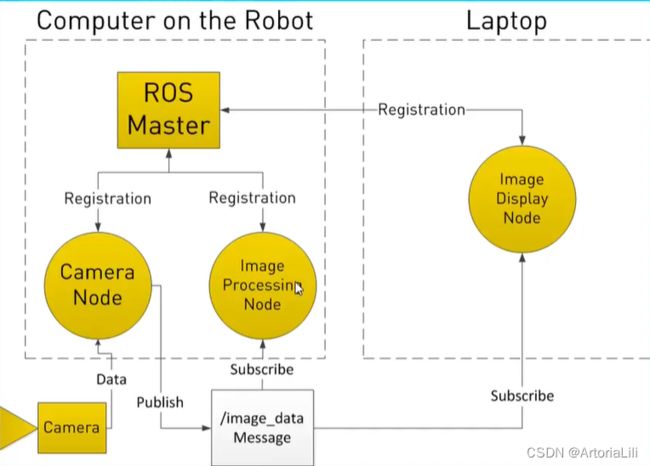
节点:一个可执行程序进程,通常一个node负责机器人的一个功能,也可以通过同一局域网作用与不同的机器人
(2)四种通信方式
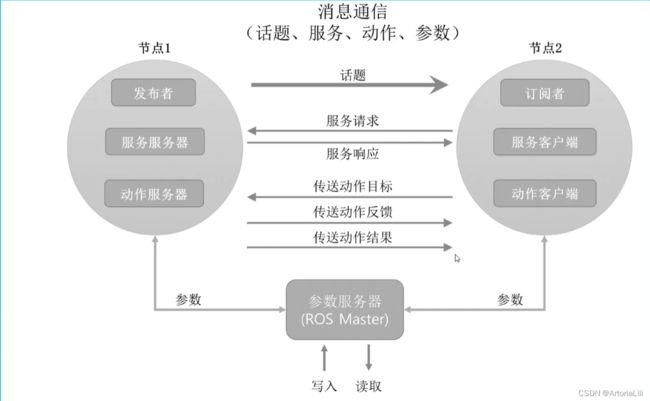
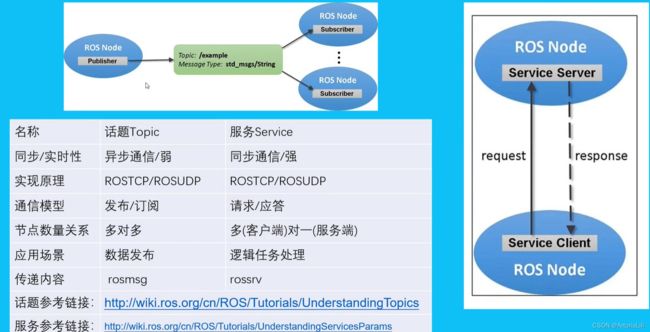
(3)话题与服务
(4)动作

· goal - 用于向服务器发送目标
· cancel - 用于向服务器发送取消请求
· status - 用于通知客户端系统中每个目标的2当前状态
· feedback - 用于周期反馈目标的辅助信息
· rssult - 用于向client发送任务的执行结果,这个topic指挥发送一次
(5)参数服务器
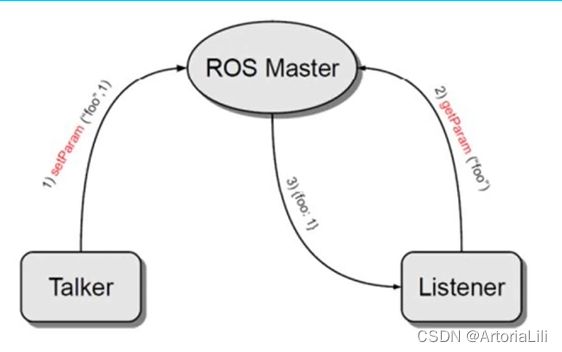
并非是一个node,运行在master中,节点储存参数的地方
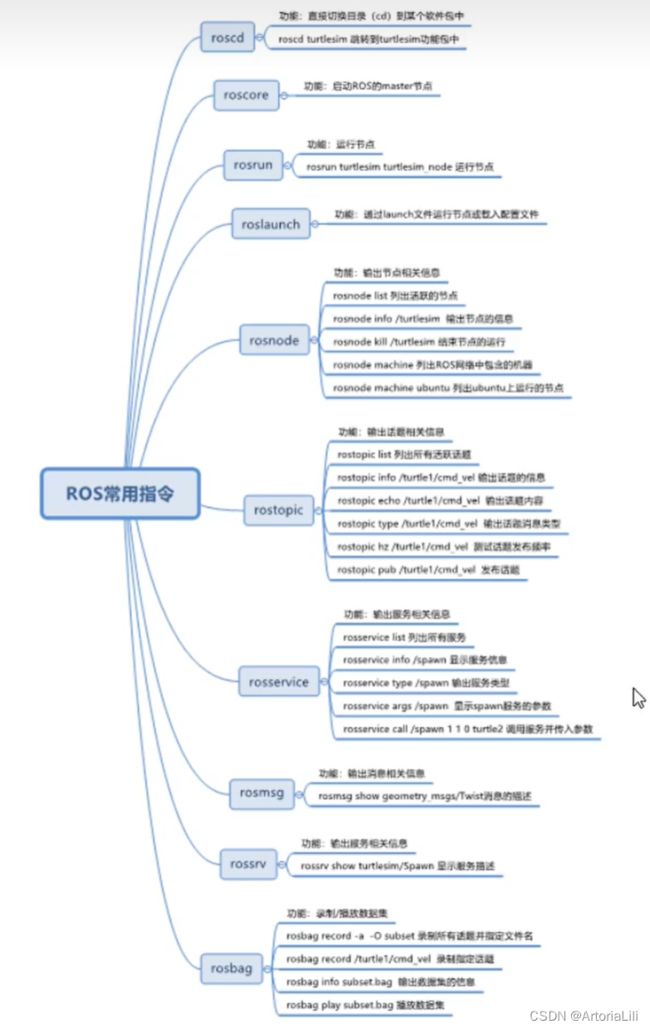
常用的shell命令
一图流:
常用图形工具
1.
rqt_graph
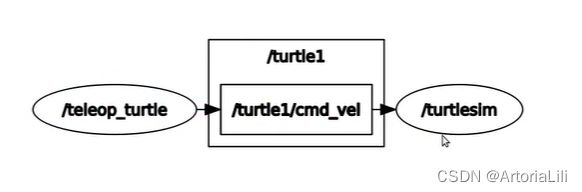
显示节点与节点之间的关系
2.
rqt_plot用于显示变量,查找关注的目标,同时改变坐标尺度,当我们移动乌龟时,图像也会跟着移动
3.查看摄像头/图像
//安装摄像头功能包
sudo apt install ros-melodic-uvc-camera
//运行
rosrun uvc_camera uvc_camera_node
这个话题如果使用echo的方式打印出来,图像是无法直接看出的,所以我们需要借助工具
rqt_image_view
同时选择我们的话题就可以查看
同时我们也可以使用roslaunch启动,roslaunch的机制如果我们没有启动roscore,他会自动帮我们启动,这个文件中为我们提供了launch,我们可以直接使用
roslaunch uvc_camera camera_node.launch
4. rviz
ros下,我们利用补齐就可以看到有许多工具,我们上面说明了一些重要的,同时还有一个rviz
他是一个强大的图像化显示工具,进行3d显示,2维也可以进行显示,我们之后再详细介绍
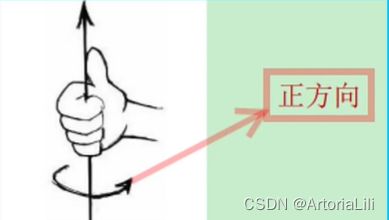
ROS坐标与TF变换
1.坐标定义法

2.rviz中显示坐标

当我们把两个小乌龟重合后,打开tf坐标
rosrun rqt_tf_tree rqt_tf_tree
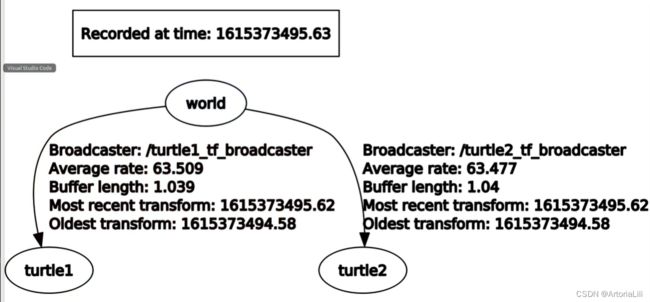
可以有两个乌龟相对于中心坐标的位置
工作空间的创建与编译
1.package.xml
该文件定义有关软件包的属性,例如软件包名称,版本号,作者,维护者以及对其他catkin软件包的依赖性。请注意,该概念类似于旧版 rosbuild 构建系统中使用的manifest.xml文件
demo01_hello_vscode
0.0.0
The demo01_hello_vscode package
xuzuo
TODO
catkin
roscpp
rospy
std_msgs
roscpp
rospy
std_msgs
roscpp
rospy
std_msgs
1.建立工作空间
mkdir catkin_ws
2.我们需要进入空间,创立src
cd catkin_ws/
3.我们的东西就要进入src目录下
mkdir src
4.将我们的包带进去
![]()
5.退出到目录
cd ..
6.进行编译
catkin_make7.我们还需要把工作空间加到环境变量里
vim .bashrc

ROS编程入门
工作空间的创建与编译
(1)ros文件内容介绍

WorkSpace --- 自定义的工作空间
|--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
|--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
|--- src: 源码
|-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
|-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
|-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
|-- scripts 存储python文件
|-- src 存储C++源文件
|-- include 头文件
|-- msg 消息通信格式文件
|-- srv 服务通信格式文件
|-- action 动作格式文件
|-- launch 可一次性运行多个节点
|-- config 配置信息
|-- CMakeLists.txt: 编译的基本配置
1.package.xml
//该文件定义有关软件包的属性
demo01_hello_vscode
0.0.0
The demo01_hello_vscode package
xuzuo
TODO
catkin
roscpp
rospy
std_msgs
roscpp
rospy
std_msgs
roscpp
rospy
std_msgs
2.CMakelists.txt
//文件CMakeLists.txt是CMake构建系统的输入,用于构建软件包
cmake_minimum_required(VERSION 3.0.2) #所需 cmake 版本
project(demo01_hello_vscode) #包名称,会被 ${PROJECT_NAME} 的方式调用
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
#设置构建所需要的软件包
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
)
## System dependencies are found with CMake's conventions
#默认添加系统依赖
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# 启动 python 模块支持
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
## 声明 ROS 消息、服务、动作... ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# 生成消息、服务时的依赖包
# generate_messages(
# DEPENDENCIES
# std_msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
## 声明 ROS 动态参数配置 ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
## catkin 特定配置##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
# 运行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo01_hello_vscode
# CATKIN_DEPENDS roscpp rospy std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
# 添加头文件路径,当前程序包的头文件路径位于其他文件路径之前
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# 声明 C++ 库
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/demo01_hello_vscode.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# 添加库的 cmake 目标依赖
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# 声明 C++ 可执行文件
add_executable(Hello_VSCode src/Hello_VSCode.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
#重命名c++可执行文件
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
#添加可执行文件的 cmake 目标依赖
add_dependencies(Hello_VSCode ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
#指定库、可执行文件的链接库
target_link_libraries(Hello_VSCode
${catkin_LIBRARIES}
)
#############
## Install ##
## 安装 ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
#设置用于安装的可执行脚本
catkin_install_python(PROGRAMS
scripts/Hi.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_demo01_hello_vscode.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
(2)话题通信基本操作
在模型实现中,ROS master 不需要实现,而连接的建立也已经被封装了,需要关注的关键点有三个:
- 发布方
- 接收方
- 数据(此处为普通文本)
所以我们需要实现的流程为:
- 编写发布方实现;
- 编写订阅方实现;
- 编辑配置文件;
- 编译并执行。
需求:实现通信,一方接受,一方发送
消息发布方: helloworld + 计数
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h" //普通文本类型的消息
#include
int main(int argc, char *argv[])
{
//设置编码
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
// 参数1和参数2 后期为节点传值会使用
// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一
ros::init(argc,argv,"talker");
//3.实例化 ROS 句柄
ros::NodeHandle nh;//该类封装了 ROS 中的一些常用功能
//4.实例化 发布者 对象
//泛型: 发布的消息类型
//参数1: 要发布到的话题
//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)
ros::Publisher pub = nh.advertise("chatter",10);
//5.组织被发布的数据,并编写逻辑发布数据
//数据(动态组织)
std_msgs::String msg;
// msg.data = "你好啊!!!";
std::string msg_front = "Hello 你好!"; //消息前缀
int count = 0; //消息计数器
//逻辑(一秒10次)
ros::Rate r(1);
//节点不死
while (ros::ok())
{
//使用 stringstream 拼接字符串与编号
std::stringstream ss;
ss << msg_front << count;
msg.data = ss.str();
//发布消息
pub.publish(msg);
//加入调试,打印发送的消息
ROS_INFO("发送的消息:%s",msg.data.c_str());
//根据前面制定的发送贫频率自动休眠 休眠时间 = 1/频率;
r.sleep();
count++;//循环结束前,让 count 自增
//暂无应用
ros::spinOnce();
}
return 0;
} 编辑法2(冰达)
1. 建立文件 talker.cpp 用于通信的发布者
2. 包含头文件
// ros头文件
#include "ros/ros.h"
//普通文本类型的消息
#include "std_msgs/String.h" 3. 写标准main函数、(m)
int main(int argc,char **argv)
{
//初始化ros,三个参数,最后一个为节点名称
ros::init(argc,argv,"talker");
//不能在一个ros中运行两个节点,所以要创建句点
ros:NodeHandle n;
// 创建发布器,最后为发布类型string,发布的消息名为chatter,1000个,储存我们的消息
ros:Publisher chatter_pub = n.advertise("chatter",1000);
//创建一个循环,这里用10hz
ros:Rate loop_rate(10);
//记数,查看一共有多少个话题
int count = 0;
//写一个死循环,让他发送消息
while(ros::ok()) // 当收到ctrl + c就会停止
{
std_msgs::String msg; //名字为msg
std:stringstream ss; // 命名消息
ss<<"hello world"< 接下来我们来看看订阅者
#include "ros/ros.h"
#include "std_msgs/String"
void chatterCallback(const std_msgs::StringConstPtr&msg)
{
ROS_INFO("i heard:[%s] ",msg.data.c_str()); //以字符串形式
}
int main(int argc,char **argv)
{
ros::init(argc,argv, "Listener");
ros::NodeHandle n;
ros::Subcriber sub=n.subcribe("chatter",1000,chatterCallback);
ros::spin(); //循环
return 0;
}