前言
废话不多说,直接开造。这里的话我们有两个目标,第一个是如何把一个2维图片上的点映射到3维空间。第二就是如何生成3D点云。当然实际上这是一个大问题,因为只要解决了第一个问题,第二个问题就是“送分”
二维RGB图像
在说到3D点云之前我们就不得不说到RGB图像,也就是一些二维图像。
图像以像RGB三个通道的形式进行存储。也就是这样:

平时我们看到的就是左边的2D图像,实际上是以右边的形式存储的。
那么从我们的矩阵角度来看的话,大概是这个样子的:
[ [[r,g,b],[r,g,b],[r,g,b],[r,g,b]], [[r,g,b],[r,g,b],[r,g,b],[r,g,b]], ... ]
这里面存在了两组信息,
第一组就是我们最容易忽略的位置信息,也就是像素点的位置。
第二组就是我们的色彩信息。
显然如果我们想要生成3D点云的话,我们的色彩信息是必要的。
而位置信息,在二维平面上,是在3为空间上的映射
那么要想得到3D点云,那么我们就必须得到完整的位置坐标,也就是x,y,z
成像原理
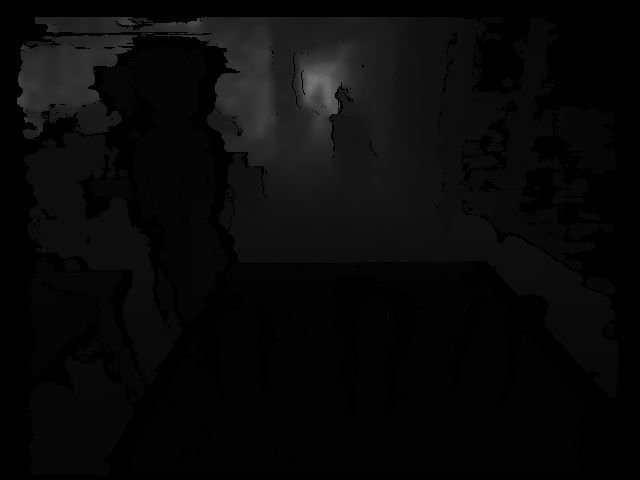
那么说到这里的话,我们就不得不说到,摄像机是如何把咱们的影像映射 出来的了。
大概他是这样成像的:

这里咱们有三个东西需要注意一下。
首先是我们的摄像机位置
之后是相片的位置也就是中间那个
最后是我们物品实际位置
所以我们实际上的一个二维图像,就是一个投影,在实际上的话,我们可以理解为深度为1的空间。
但是这个投影
所以的话,用数学矩阵的形式表示为:

其中u,v为二维平面上的任意点坐标,1为深度,Zc就是咱们的二维平面上的点。
其中R,T是外参矩阵,并且我们的世界坐标原点就是相机的坐标原点
所以,R,T可以取下面的矩阵,(具体原理的话比较复杂,我也不是很懂为什么会这样,我回头再补补数学)

带入得到:
最后转换得到这个公式:

那么接下来咱们就对这个公式进行处理,来生成我们的点云
数据准备
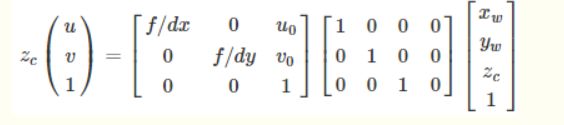
前面通过公式我们可以了解到,一个二维图像,具备了RGB信息,还有对应的那个像素点在二维空间的“投影”。我们需要将这个点重新还原到三维空间。所以这里需要使用到深度信息,而这个是需要一些专业摄像机才有的,比如iphone的,或者机器人的:

有了这个深度图片,我们就可以还原坐标了。其实说到这儿,我们其实可以发现,RGB图片的话其实只是提供了一下色彩如果要还原为3D点云的话,因为深度图和对应的rgb的矩阵的位置是一一对应的。
图片加载
说到这里,我们就可以开始我们的正式编码了。
首先是咱们的图片加载阶段,这里的话主要是我们先需要一些信息,和读取图片。
def __init__(self, rgb_file, depth_file, save_ply, camera_intrinsics=[784.0, 779.0, 649.0, 405.0]):
self.rgb_file = rgb_file
self.depth_file = depth_file
self.save_ply = save_ply
self.rgb = cv2.imread(rgb_file)
self.depth = cv2.imread(self.depth_file, -1)
print("your depth image shape is:",self.depth.shape)
self.width = self.rgb.shape[1]
self.height = self.rgb.shape[0]
self.camera_intrinsics = camera_intrinsics
self.depth_scale = 1000
下面的这个东西,就是咱们公式当中的u0,v0,dx,dy
camera_intrinsics=[784.0, 779.0, 649.0, 405.0]
这个要注意的是,这个玩意呢,是不同的设备相机有不同的参数,要根据自己的设置。
一般来说相机会给这样的矩阵:

我们对应起来就可以了。
之后是要注意的是这个深度图是uint16的,所以读取的时候加个-1
![]()
这里还有个东西:
深度图与比例因子(scale_factor)
在代码中是:
self.depth_scale = 1000
深度图对应的尺度因子是深度图中存储的值与真实深度(单位为m)的比例
通常情况下,深度值以毫米为单位存储在16位无符号整数中(0~65535),因此要获得以米为单位的z值,深度图的像素需要除以比例因子1000。不过不同相机的的比例因子可能不同,我这里的话是1000,这个看自己的实际的。
算法实现
之后就是咱们的算法实现了,这个主要是位置换算,得到真实的x,y,z
depth = np.asarray(self.depth, dtype=np.uint16).T
# depth[depth==65535]=0
self.Z = depth / self.depth_scale
fx, fy, cx, cy = self.camera_intrinsics
X = np.zeros((self.width, self.height))
Y = np.zeros((self.width, self.height))
for i in range(self.width):
X[i, :] = np.full(X.shape[1], i)
self.X = ((X - cx / 2) * self.Z) / fx
for i in range(self.height):
Y[:, i] = np.full(Y.shape[0], i)
self.Y = ((Y - cy / 2) * self.Z) / fy
之后,x,y,z就算好了。
注意的的是我们计算完成后得到的x,y , x 的每一组向量都是 宽×高
生成点云
现在咱们已经得到了具体的坐标。那么接下来是要生成点云的,我们要把剩下的色彩信息搞上去。
代码很简单:
data_ply = np.zeros((6, self.width * self.height))
data_ply[0] = self.X.T.reshape(-1)
data_ply[1] = -self.Y.T.reshape(-1)
data_ply[2] = -self.Z.T.reshape(-1)
img = np.array(self.rgb, dtype=np.uint8)
data_ply[3] = img[:, :, 0:1].reshape(-1)
data_ply[4] = img[:, :, 1:2].reshape(-1)
data_ply[5] = img[:, :, 2:3].reshape(-1)
self.data_ply = data_ply
t2 = time.time()
print('calcualte 3d point cloud Done.', t2 - t1)
之后就是保存文件了。
目前点云的主要存储格式包括:pts、LAS、PCD、.xyz 和. pcap 等
例如:
pts 点云文件格式是最简便的点云格式,直接按 XYZ 顺序存储点云数据, 可以是整型或者浮点型。

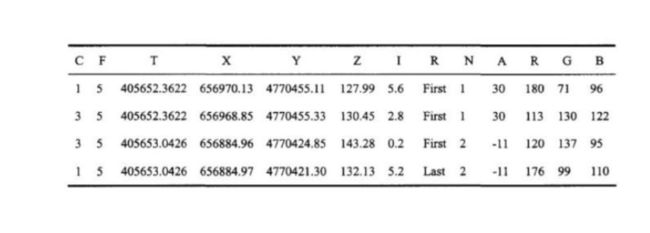
LAS 是激光雷达数据(LiDAR),存储格式比 pts 复杂,旨在提供一种开放的格式标准,允许不同的硬件和软件提供商输出可互操作的统一格式。LAS 格式点云截图,其中 C:class(所属类),F:flight(航线号),T:time(GPS 时间),I:intensity(回波强度),R:return(第几次回波),N:number of return(回波次数),A:scan angle(扫描角),RGB:red green blue(RGB 颜色值)。
等等,我们这里的是ply
全名为多边形档案(Polygon File Format)或 史丹佛三角形档案(Stanford Triangle Format)。. 该格式主要用以储存立体扫描结果的三维数值,透过多边形片面的集合描述三维物体,与其他格式相较之下这是较为简单的方法。. 它可以储存的资讯包含颜色、透明度、表面法向量、材质座标与资料可信度,并能对多边形的正反两面设定不同的属性。
格式为
头部
顶点列表
面片列表
其他元素列表

start = time.time()
float_formatter = lambda x: "%.4f" % x
points = []
for i in self.data_ply.T:
points.append("{} {} {} {} {} {} 0\n".format
(float_formatter(i[0]), float_formatter(i[1]), float_formatter(i[2]),
int(i[3]), int(i[4]), int(i[5])))
file = open(self.save_ply, "w")
file.write('''ply
format ascii 1.0
element vertex %d
property float x
property float y
property float z
property uchar red
property uchar green
property uchar blue
property uchar alpha
end_header
%s
''' % (len(points), "".join(points)))
file.close()
end = time.time()
print("Write into .ply file Done.", end - start)
点云显示
这个的话可以使用软件

也可以使用open3d模块
完整代码
import cv2
import numpy as np
import open3d as o3d
import time
class point_cloud_generator():
def __init__(self, rgb_file, depth_file, save_ply, camera_intrinsics=[784.0, 779.0, 649.0, 405.0]):
self.rgb_file = rgb_file
self.depth_file = depth_file
self.save_ply = save_ply
self.rgb = cv2.imread(rgb_file)
self.depth = cv2.imread(self.depth_file, -1)
print("your depth image shape is:",self.depth.shape)
self.width = self.rgb.shape[1]
self.height = self.rgb.shape[0]
self.camera_intrinsics = camera_intrinsics
self.depth_scale = 1000
def compute(self):
t1 = time.time()
depth = np.asarray(self.depth, dtype=np.uint16).T
# depth[depth==65535]=0
self.Z = depth / self.depth_scale
fx, fy, cx, cy = self.camera_intrinsics
X = np.zeros((self.width, self.height))
Y = np.zeros((self.width, self.height))
for i in range(self.width):
X[i, :] = np.full(X.shape[1], i)
self.X = ((X - cx / 2) * self.Z) / fx
for i in range(self.height):
Y[:, i] = np.full(Y.shape[0], i)
self.Y = ((Y - cy / 2) * self.Z) / fy
data_ply = np.zeros((6, self.width * self.height))
data_ply[0] = self.X.T.reshape(-1)
data_ply[1] = -self.Y.T.reshape(-1)
data_ply[2] = -self.Z.T.reshape(-1)
img = np.array(self.rgb, dtype=np.uint8)
data_ply[3] = img[:, :, 0:1].reshape(-1)
data_ply[4] = img[:, :, 1:2].reshape(-1)
data_ply[5] = img[:, :, 2:3].reshape(-1)
self.data_ply = data_ply
t2 = time.time()
print('calcualte 3d point cloud Done.', t2 - t1)
def write_ply(self):
start = time.time()
float_formatter = lambda x: "%.4f" % x
points = []
for i in self.data_ply.T:
points.append("{} {} {} {} {} {} 0\n".format
(float_formatter(i[0]), float_formatter(i[1]), float_formatter(i[2]),
int(i[3]), int(i[4]), int(i[5])))
file = open(self.save_ply, "w")
file.write('''ply
format ascii 1.0
element vertex %d
property float x
property float y
property float z
property uchar red
property uchar green
property uchar blue
property uchar alpha
end_header
%s
''' % (len(points), "".join(points)))
file.close()
end = time.time()
print("Write into .ply file Done.", end - start)
def show_point_cloud(self):
pcd = o3d.io.read_point_cloud(self.save_ply)
o3d.visualization.draw([pcd])
if __name__ == '__main__':
camera_intrinsics = [378.998657, 378.639862, 321.935120, 240.766663]
rgb_file = "data/1.jpg"
depth_file = "data/1.png"
save_ply = "data.ply"
a = point_cloud_generator(rgb_file=rgb_file,
depth_file=depth_file,
save_ply=save_ply,
camera_intrinsics=camera_intrinsics
)
a.compute()
a.write_ply()
a.show_point_cloud()
效果如下:

总结
这里的话其实还是从一张深度图到3d点云,实际上有时候我们可能只需一组坐标然后还原,那么这部分的话,要实现的话也不难,不过要重新做一点转换,公式还是那个公式。这里的话就不能在多说了,而且这里还有一点值得一提的是这个通过这种方式得到的3d点云其实怎么说呢,并不是特别准,所以这边还是要更加牛批的人工智能算法的,目前有个集成玩意可以玩玩的是middlepipe。这方面的话Google还是得是他。
到此这篇关于如何基于Python深度图生成3D点云的文章就介绍到这了,更多相关Python深度图生成3D点云内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!