图像识别之Mobilenet、Resnet50与InceptionV3详解
图像识别之Mobilenet、Resnet50与InceptionV3详解
项目GitHub地址:
https://github.com/dddlli/CNN-Image-Recognition.git
一、mobilenet
学习前言
MobileNet是一种轻量级网络,相比于其它结构网络,它不一定是最准的,但是它真的很轻!
什么是MobileNet模型
MobileNet模型是Google针对手机等嵌入式设备提出的一种轻量级的深层神经网络,其使用的核心思想便是depthwise separable convolution。
对于一个卷积点而言:
假设有一个3×3大小的卷积层,其输入通道为16、输出通道为32。具体为,32个3×3大小的卷积核会遍历16个通道中的每个数据,最后可得到所需的32个输出通道,所需参数为16×32×3×3=4608个。
应用深度可分离卷积,用16个3×3大小的卷积核分别遍历16通道的数据,得到了16个特征图谱。在融合操作之前,接着用32个1×1大小的卷积核遍历这16个特征图谱,所需参数为16×3×3+16×32×1×1=656个。
可以看出来depthwise separable convolution可以减少模型的参数。
如下这张图就是depthwise separable convolution的结构
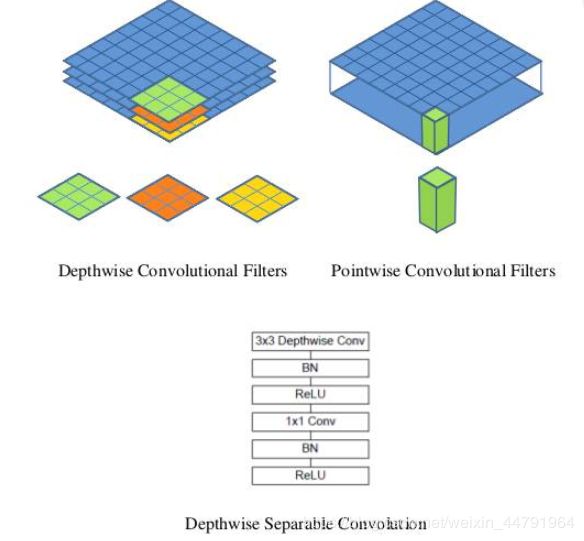
在建立模型的时候,可以使用Keras中的DepthwiseConv2D层实现深度可分离卷积,然后再利用1x1卷积调整channels数。
通俗地理解就是3x3的卷积核厚度只有一层,然后在输入张量上一层一层地滑动,每一次卷积完生成一个输出通道,当卷积完成后,在利用1x1的卷积调整厚度。
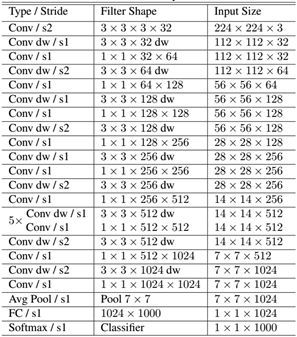
如下就是MobileNet的结构,其中Conv dw就是分层卷积,在其之后都会接一个1x1的卷积进行通道处理,
源程序:
#-------------------------------------------------------------#
# MobileNet的网络部分
#-------------------------------------------------------------#
import warnings
import numpy as np
from keras.preprocessing import image
from keras.models import Model
from keras.layers import DepthwiseConv2D,Input,Activation,Dropout,Reshape,BatchNormalization,GlobalAveragePooling2D,GlobalMaxPooling2D,Conv2D
from keras.applications.imagenet_utils import decode_predictions
from keras import backend as K
def MobileNet(input_shape=[224,224,3],
depth_multiplier=1,
dropout=1e-3,
classes=1000):
img_input = Input(shape=input_shape)
# 224,224,3 -> 112,112,32
x = _conv_block(img_input, 32, strides=(2, 2))
# 112,112,32 -> 112,112,64
x = _depthwise_conv_block(x, 64, depth_multiplier, block_id=1)
# 112,112,64 -> 56,56,128
x = _depthwise_conv_block(x, 128, depth_multiplier,
strides=(2, 2), block_id=2)
# 56,56,128 -> 56,56,128
x = _depthwise_conv_block(x, 128, depth_multiplier, block_id=3)
# 56,56,128 -> 28,28,256
x = _depthwise_conv_block(x, 256, depth_multiplier,
strides=(2, 2), block_id=4)
# 28,28,256 -> 28,28,256
x = _depthwise_conv_block(x, 256, depth_multiplier, block_id=5)
# 28,28,256 -> 14,14,512
x = _depthwise_conv_block(x, 512, depth_multiplier,
strides=(2, 2), block_id=6)
# 14,14,512 -> 14,14,512
x = _depthwise_conv_block(x, 512, depth_multiplier, block_id=7)
x = _depthwise_conv_block(x, 512, depth_multiplier, block_id=8)
x = _depthwise_conv_block(x, 512, depth_multiplier, block_id=9)
x = _depthwise_conv_block(x, 512, depth_multiplier, block_id=10)
x = _depthwise_conv_block(x, 512, depth_multiplier, block_id=11)
# 14,14,512 -> 7,7,1024
x = _depthwise_conv_block(x, 1024, depth_multiplier,
strides=(2, 2), block_id=12)
x = _depthwise_conv_block(x, 1024, depth_multiplier, block_id=13)
# 7,7,1024 -> 1,1,1024
x = GlobalAveragePooling2D()(x)
x = Reshape((1, 1, 1024), name='reshape_1')(x)
x = Dropout(dropout, name='dropout')(x)
x = Conv2D(classes, (1, 1),padding='same', name='conv_preds')(x)
x = Activation('softmax', name='act_softmax')(x)
x = Reshape((classes,), name='reshape_2')(x)
inputs = img_input
model = Model(inputs, x, name='mobilenet_1_0_224_tf')
model_name = 'mobilenet_1_0_224_tf.h5'
model.load_weights(model_name)
return model
def _conv_block(inputs, filters, kernel=(3, 3), strides=(1, 1)):
x = Conv2D(filters, kernel,
padding='same',
use_bias=False,
strides=strides,
name='conv1')(inputs)
x = BatchNormalization(name='conv1_bn')(x)
return Activation(relu6, name='conv1_relu')(x)
def _depthwise_conv_block(inputs, pointwise_conv_filters,
depth_multiplier=1, strides=(1, 1), block_id=1):
x = DepthwiseConv2D((3, 3),
padding='same',
depth_multiplier=depth_multiplier,
strides=strides,
use_bias=False,
name='conv_dw_%d' % block_id)(inputs)
x = BatchNormalization(name='conv_dw_%d_bn' % block_id)(x)
x = Activation(relu6, name='conv_dw_%d_relu' % block_id)(x)
x = Conv2D(pointwise_conv_filters, (1, 1),
padding='same',
use_bias=False,
strides=(1, 1),
name='conv_pw_%d' % block_id)(x)
x = BatchNormalization(name='conv_pw_%d_bn' % block_id)(x)
return Activation(relu6, name='conv_pw_%d_relu' % block_id)(x)
def relu6(x):
return K.relu(x, max_value=6)
def preprocess_input(x):
x /= 255.
x -= 0.5
x *= 2.
return x
if __name__ == '__main__':
model = MobileNet(input_shape=(224, 224, 3))
model.summary()
img_path = 'elephant.jpg'
img = image.load_img(img_path, target_size=(224, 224))
x = image.img_to_array(img)
x = np.expand_dims(x, axis=0)
x = preprocess_input(x)
print('Input image shape:', x.shape)
preds = model.predict(x)
print(np.argmax(preds))
print('Predicted:', decode_predictions(preds,1)) # 只显示top1
二、Resnet 50
ResNet50模型的复现详解
- [学习前言]
- [什么是残差网络]
学习前言
最近看yolo3里面讲到了残差网络,对这个网络结构很感兴趣,于是了解到这个网络结构最初的使用是在ResNet网络里。
1.什么是残差网络
Residual net(残差网络):
将靠前若干层的某一层数据输出直接跳过多层引入到后面数据层的输入部分。
意味着后面的特征层的内容会有一部分由其前面的某一层线性贡献。
其结构如下:
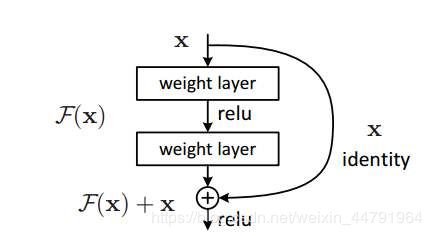
深度残差网络的设计是为了克服由于网络深度加深而产生的学习效率变低与准确率无法有效提升的问题。
2.什么是ResNet50模型
ResNet50有两个基本的块,分别名为Conv Block和Identity Block,其中Conv Block输入和输出的维度是不一样的,所以不能连续串联,它的作用是改变网络的维度;Identity Block输入维度和输出维度相同,可以串联,用于加深网络的。
Conv Block的结构如下:

Identity Block的结构如下:

这两个都是残差网络结构。
总的网络结构如下:
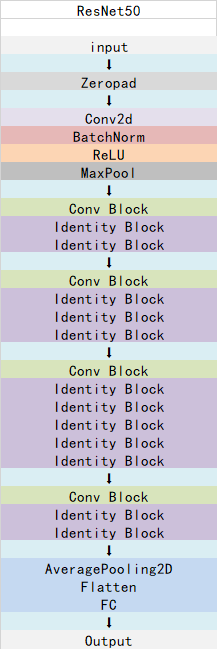
这样看起来可能比较抽象,还有一副很好的我从网上找的图,可以拉到最后面去看哈,放前面太占位置了。
源程序:
#-------------------------------------------------------------#
# ResNet50的网络部分
#-------------------------------------------------------------#
from __future__ import print_function
import numpy as np
from keras import layers
from keras.layers import Input
from keras.layers import Dense,Conv2D,MaxPooling2D,ZeroPadding2D,AveragePooling2D
from keras.layers import Activation,BatchNormalization,Flatten
from keras.models import Model
from keras.preprocessing import image
import keras.backend as K
from keras.utils.data_utils import get_file
from keras.applications.imagenet_utils import decode_predictions
from keras.applications.imagenet_utils import preprocess_input
def identity_block(input_tensor, kernel_size, filters, stage, block):
filters1, filters2, filters3 = filters
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
x = Conv2D(filters1, (1, 1), name=conv_name_base + '2a')(input_tensor)
x = BatchNormalization(name=bn_name_base + '2a')(x)
x = Activation('relu')(x)
x = Conv2D(filters2, kernel_size,padding='same', name=conv_name_base + '2b')(x)
x = BatchNormalization(name=bn_name_base + '2b')(x)
x = Activation('relu')(x)
x = Conv2D(filters3, (1, 1), name=conv_name_base + '2c')(x)
x = BatchNormalization(name=bn_name_base + '2c')(x)
x = layers.add([x, input_tensor])
x = Activation('relu')(x)
return x
def conv_block(input_tensor, kernel_size, filters, stage, block, strides=(2, 2)):
filters1, filters2, filters3 = filters
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
#降维
x = Conv2D(filters1, (1, 1), strides=strides,
name=conv_name_base + '2a')(input_tensor)
x = BatchNormalization(name=bn_name_base + '2a')(x)
x = Activation('relu')(x)
#3*3卷积
x = Conv2D(filters2, kernel_size, padding='same',
name=conv_name_base + '2b')(x)
x = BatchNormalization(name=bn_name_base + '2b')(x)
x = Activation('relu')(x)
#升维
x = Conv2D(filters3, (1, 1), name=conv_name_base + '2c')(x)
x = BatchNormalization(name=bn_name_base + '2c')(x)
#残差边
shortcut = Conv2D(filters3, (1, 1), strides=strides,
name=conv_name_base + '1')(input_tensor)
shortcut = BatchNormalization(name=bn_name_base + '1')(shortcut)
x = layers.add([x, shortcut])
x = Activation('relu')(x)
return x
def ResNet50(input_shape=[224,224,3],classes=1000):
#224*224*3
img_input = Input(shape=input_shape)
x = ZeroPadding2D((3, 3))(img_input)
#
x = Conv2D(64, (7, 7), strides=(2, 2), name='conv1')(x)
x = BatchNormalization(name='bn_conv1')(x)
x = Activation('relu')(x)
x = MaxPooling2D((3, 3), strides=(2, 2))(x)
x = conv_block(x, 3, [64, 64, 256], stage=2, block='a', strides=(1, 1))
x = identity_block(x, 3, [64, 64, 256], stage=2, block='b')
x = identity_block(x, 3, [64, 64, 256], stage=2, block='c')
x = conv_block(x, 3, [128, 128, 512], stage=3, block='a')
x = identity_block(x, 3, [128, 128, 512], stage=3, block='b')
x = identity_block(x, 3, [128, 128, 512], stage=3, block='c')
x = identity_block(x, 3, [128, 128, 512], stage=3, block='d')
x = conv_block(x, 3, [256, 256, 1024], stage=4, block='a')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='b')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='c')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='d')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='e')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='f')
x = conv_block(x, 3, [512, 512, 2048], stage=5, block='a')
x = identity_block(x, 3, [512, 512, 2048], stage=5, block='b')
x = identity_block(x, 3, [512, 512, 2048], stage=5, block='c')
x = AveragePooling2D((7, 7), name='avg_pool')(x)
x = Flatten()(x)
x = Dense(classes, activation='softmax', name='fc1000')(x)
model = Model(img_input, x, name='resnet50')
model.load_weights("resnet50_weights_tf_dim_ordering_tf_kernels.h5")
return model
if __name__ == '__main__':
model = ResNet50()
model.summary()
img_path = 'elephant.jpg'
img_path = 'bike.jpg'
img = image.load_img(img_path, target_size=(224, 224))
x = np.expand_dims(x, axis=0)
x = preprocess_input(x)
print('Input image shape:', x.shape)
preds = model.predict(x)
print('Predicted:', decode_predictions(preds))
三、InceptionV3
Inception系列的结构和其它的前向神经网络的结构不太一样,每一层的内容不是直直向下的,而是分了很多的块。
1.什么是InceptionV3模型
InceptionV3模型是谷歌Inception系列里面的第三代模型,其模型结构与InceptionV2模型放在了同一篇论文里,其实二者模型结构差距不大,相比于其它神经网络模型,Inception网络最大的特点在于将神经网络层与层之间的卷积运算进行了拓展。
如VGG,AlexNet网络,它就是一直卷积下来的,一层接着一层;
ResNet则是创新性的引入了残差网络的概念,使得靠前若干层的某一层数据输出直接跳过多层引入到后面数据层的输入部分,后面的特征层的内容会有一部分由其前面的某一层线性贡献。
而Inception网络则是采用不同大小的卷积核,使得存在不同大小的感受野,最后实现拼接达到不同尺度特征的融合。
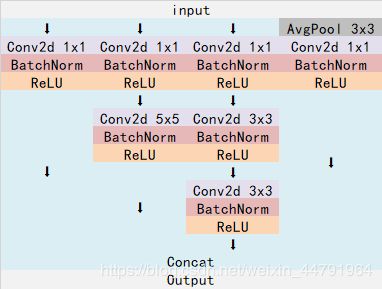
对于InceptionV3而言,其网络中存在着如下的结构。
这个结构使用不同大小的卷积核对输入进行卷积(这个结构主要在代码中的block1使用)。
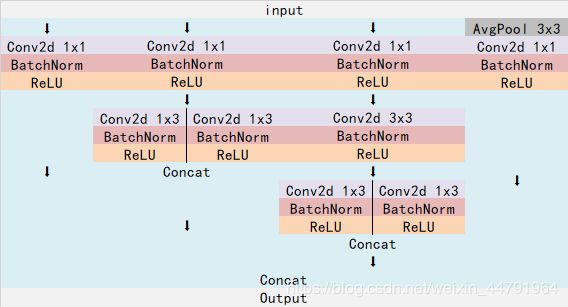
还存在着这样的结构,利用1x7的卷积和7x1的卷积代替7x7的卷积,这样可以只使用约(1x7 + 7x1) / (7x7) = 28.6%的计算开销;利用1x3的卷积和3x1的卷积代替3x3的卷积,这样可以只使用约(1x3 + 3x1) / (3x3) = 67%的计算开销。
下图利用1x7的卷积和7x1的卷积代替7x7的卷积(这个结构主要在代码中的block2使用)。

下图利用1x3的卷积和3x1的卷积代替3x3的卷积(这个结构主要在代码中的block3使用)。
源程序:
#-------------------------------------------------------------#
# InceptionV3的网络部分
#-------------------------------------------------------------#
from __future__ import print_function
from __future__ import absolute_import
import warnings
import numpy as np
from keras.models import Model
from keras import layers
from keras.layers import Activation,Dense,Input,BatchNormalization,Conv2D,MaxPooling2D,AveragePooling2D
from keras.layers import GlobalAveragePooling2D,GlobalMaxPooling2D
from keras.engine.topology import get_source_inputs
from keras.utils.layer_utils import convert_all_kernels_in_model
from keras.utils.data_utils import get_file
from keras import backend as K
from keras.applications.imagenet_utils import decode_predictions
from keras.preprocessing import image
def conv2d_bn(x,
filters,
num_row,
num_col,
strides=(1, 1),
padding='same',
name=None):
if name is not None:
bn_name = name + '_bn'
conv_name = name + '_conv'
else:
bn_name = None
conv_name = None
x = Conv2D(
filters, (num_row, num_col),
strides=strides,
padding=padding,
use_bias=False,
name=conv_name)(x)
x = BatchNormalization(scale=False, name=bn_name)(x)
x = Activation('relu', name=name)(x)
return x
def InceptionV3(input_shape=[299,299,3],
classes=1000):
img_input = Input(shape=input_shape)
x = conv2d_bn(img_input, 32, 3, 3, strides=(2, 2), padding='valid')
x = conv2d_bn(x, 32, 3, 3, padding='valid')
x = conv2d_bn(x, 64, 3, 3)
x = MaxPooling2D((3, 3), strides=(2, 2))(x)
x = conv2d_bn(x, 80, 1, 1, padding='valid')
x = conv2d_bn(x, 192, 3, 3, padding='valid')
x = MaxPooling2D((3, 3), strides=(2, 2))(x)
#--------------------------------#
# Block1 35x35
#--------------------------------#
# Block1 part1
# 35 x 35 x 192 -> 35 x 35 x 256
branch1x1 = conv2d_bn(x, 64, 1, 1)
branch5x5 = conv2d_bn(x, 48, 1, 1)
branch5x5 = conv2d_bn(branch5x5, 64, 5, 5)
branch3x3dbl = conv2d_bn(x, 64, 1, 1)
branch3x3dbl = conv2d_bn(branch3x3dbl, 96, 3, 3)
branch3x3dbl = conv2d_bn(branch3x3dbl, 96, 3, 3)
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), padding='same')(x)
branch_pool = conv2d_bn(branch_pool, 32, 1, 1)
# 64+64+96+32 = 256
x = layers.concatenate(
[branch1x1, branch5x5, branch3x3dbl, branch_pool],
axis=3,
name='mixed0')
# Block1 part2
# 35 x 35 x 256 -> 35 x 35 x 288
branch1x1 = conv2d_bn(x, 64, 1, 1)
branch5x5 = conv2d_bn(x, 48, 1, 1)
branch5x5 = conv2d_bn(branch5x5, 64, 5, 5)
branch3x3dbl = conv2d_bn(x, 64, 1, 1)
branch3x3dbl = conv2d_bn(branch3x3dbl, 96, 3, 3)
branch3x3dbl = conv2d_bn(branch3x3dbl, 96, 3, 3)
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), padding='same')(x)
branch_pool = conv2d_bn(branch_pool, 64, 1, 1)
# 64+64+96+64 = 288
x = layers.concatenate(
[branch1x1, branch5x5, branch3x3dbl, branch_pool],
axis=3,
name='mixed1')
# Block1 part3
# 35 x 35 x 288 -> 35 x 35 x 288
branch1x1 = conv2d_bn(x, 64, 1, 1)
branch5x5 = conv2d_bn(x, 48, 1, 1)
branch5x5 = conv2d_bn(branch5x5, 64, 5, 5)
branch3x3dbl = conv2d_bn(x, 64, 1, 1)
branch3x3dbl = conv2d_bn(branch3x3dbl, 96, 3, 3)
branch3x3dbl = conv2d_bn(branch3x3dbl, 96, 3, 3)
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), padding='same')(x)
branch_pool = conv2d_bn(branch_pool, 64, 1, 1)
# 64+64+96+64 = 288
x = layers.concatenate(
[branch1x1, branch5x5, branch3x3dbl, branch_pool],
axis=3,
name='mixed2')
#--------------------------------#
# Block2 17x17
#--------------------------------#
# Block2 part1
# 35 x 35 x 288 -> 17 x 17 x 768
branch3x3 = conv2d_bn(x, 384, 3, 3, strides=(2, 2), padding='valid')
branch3x3dbl = conv2d_bn(x, 64, 1, 1)
branch3x3dbl = conv2d_bn(branch3x3dbl, 96, 3, 3)
branch3x3dbl = conv2d_bn(
branch3x3dbl, 96, 3, 3, strides=(2, 2), padding='valid')
branch_pool = MaxPooling2D((3, 3), strides=(2, 2))(x)
x = layers.concatenate(
[branch3x3, branch3x3dbl, branch_pool], axis=3, name='mixed3')
# Block2 part2
# 17 x 17 x 768 -> 17 x 17 x 768
branch1x1 = conv2d_bn(x, 192, 1, 1)
branch7x7 = conv2d_bn(x, 128, 1, 1)
branch7x7 = conv2d_bn(branch7x7, 128, 1, 7)
branch7x7 = conv2d_bn(branch7x7, 192, 7, 1)
branch7x7dbl = conv2d_bn(x, 128, 1, 1)
branch7x7dbl = conv2d_bn(branch7x7dbl, 128, 7, 1)
branch7x7dbl = conv2d_bn(branch7x7dbl, 128, 1, 7)
branch7x7dbl = conv2d_bn(branch7x7dbl, 128, 7, 1)
branch7x7dbl = conv2d_bn(branch7x7dbl, 192, 1, 7)
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), padding='same')(x)
branch_pool = conv2d_bn(branch_pool, 192, 1, 1)
x = layers.concatenate(
[branch1x1, branch7x7, branch7x7dbl, branch_pool],
axis=3,
name='mixed4')
# Block2 part3 and part4
# 17 x 17 x 768 -> 17 x 17 x 768 -> 17 x 17 x 768
for i in range(2):
branch1x1 = conv2d_bn(x, 192, 1, 1)
branch7x7 = conv2d_bn(x, 160, 1, 1)
branch7x7 = conv2d_bn(branch7x7, 160, 1, 7)
branch7x7 = conv2d_bn(branch7x7, 192, 7, 1)
branch7x7dbl = conv2d_bn(x, 160, 1, 1)
branch7x7dbl = conv2d_bn(branch7x7dbl, 160, 7, 1)
branch7x7dbl = conv2d_bn(branch7x7dbl, 160, 1, 7)
branch7x7dbl = conv2d_bn(branch7x7dbl, 160, 7, 1)
branch7x7dbl = conv2d_bn(branch7x7dbl, 192, 1, 7)
branch_pool = AveragePooling2D(
(3, 3), strides=(1, 1), padding='same')(x)
branch_pool = conv2d_bn(branch_pool, 192, 1, 1)
x = layers.concatenate(
[branch1x1, branch7x7, branch7x7dbl, branch_pool],
axis=3,
name='mixed' + str(5 + i))
# Block2 part5
# 17 x 17 x 768 -> 17 x 17 x 768
branch1x1 = conv2d_bn(x, 192, 1, 1)
branch7x7 = conv2d_bn(x, 192, 1, 1)
branch7x7 = conv2d_bn(branch7x7, 192, 1, 7)
branch7x7 = conv2d_bn(branch7x7, 192, 7, 1)
branch7x7dbl = conv2d_bn(x, 192, 1, 1)
branch7x7dbl = conv2d_bn(branch7x7dbl, 192, 7, 1)
branch7x7dbl = conv2d_bn(branch7x7dbl, 192, 1, 7)
branch7x7dbl = conv2d_bn(branch7x7dbl, 192, 7, 1)
branch7x7dbl = conv2d_bn(branch7x7dbl, 192, 1, 7)
branch_pool = AveragePooling2D((3, 3), strides=(1, 1), padding='same')(x)
branch_pool = conv2d_bn(branch_pool, 192, 1, 1)
x = layers.concatenate(
[branch1x1, branch7x7, branch7x7dbl, branch_pool],
axis=3,
name='mixed7')
#--------------------------------#
# Block3 8x8
#--------------------------------#
# Block3 part1
# 17 x 17 x 768 -> 8 x 8 x 1280
branch3x3 = conv2d_bn(x, 192, 1, 1)
branch3x3 = conv2d_bn(branch3x3, 320, 3, 3,
strides=(2, 2), padding='valid')
branch7x7x3 = conv2d_bn(x, 192, 1, 1)
branch7x7x3 = conv2d_bn(branch7x7x3, 192, 1, 7)
branch7x7x3 = conv2d_bn(branch7x7x3, 192, 7, 1)
branch7x7x3 = conv2d_bn(
branch7x7x3, 192, 3, 3, strides=(2, 2), padding='valid')
branch_pool = MaxPooling2D((3, 3), strides=(2, 2))(x)
x = layers.concatenate(
[branch3x3, branch7x7x3, branch_pool], axis=3, name='mixed8')
# Block3 part2 part3
# 8 x 8 x 1280 -> 8 x 8 x 2048 -> 8 x 8 x 2048
for i in range(2):
branch1x1 = conv2d_bn(x, 320, 1, 1)
branch3x3 = conv2d_bn(x, 384, 1, 1)
branch3x3_1 = conv2d_bn(branch3x3, 384, 1, 3)
branch3x3_2 = conv2d_bn(branch3x3, 384, 3, 1)
branch3x3 = layers.concatenate(
[branch3x3_1, branch3x3_2], axis=3, name='mixed9_' + str(i))
branch3x3dbl = conv2d_bn(x, 448, 1, 1)
branch3x3dbl = conv2d_bn(branch3x3dbl, 384, 3, 3)
branch3x3dbl_1 = conv2d_bn(branch3x3dbl, 384, 1, 3)
branch3x3dbl_2 = conv2d_bn(branch3x3dbl, 384, 3, 1)
branch3x3dbl = layers.concatenate(
[branch3x3dbl_1, branch3x3dbl_2], axis=3)
branch_pool = AveragePooling2D(
(3, 3), strides=(1, 1), padding='same')(x)
branch_pool = conv2d_bn(branch_pool, 192, 1, 1)
x = layers.concatenate(
[branch1x1, branch3x3, branch3x3dbl, branch_pool],
axis=3,
name='mixed' + str(9 + i))
# 平均池化后全连接。
x = GlobalAveragePooling2D(name='avg_pool')(x)
x = Dense(classes, activation='softmax', name='predictions')(x)
inputs = img_input
model = Model(inputs, x, name='inception_v3')
return model
def preprocess_input(x):
x /= 255.
x -= 0.5
x *= 2.
return x
if __name__ == '__main__':
model = InceptionV3()
model.summary()
model.load_weights("inception_v3_weights_tf_dim_ordering_tf_kernels.h5")
img_path = 'elephant.jpg'
img = image.load_img(img_path, target_size=(299, 299))
x = image.img_to_array(img)
x = np.expand_dims(x, axis=0)
x = preprocess_input(x)
preds = model.predict(x)
print('Predicted:', decode_predictions(preds))