目标检测算法综述:R-CNN,faster R-CNN,yolo,SSD,yoloV2
1 引言
深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理。上文我们对物体识别领域的技术方案,也就是CNN进行了详细的分析,对LeNet-5 AlexNet VGG Inception ResNet MobileNet等各种优秀的模型框架有了深入理解。本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析。
目标检测可以理解为是物体识别和物体定位的综合,不仅仅要识别出物体属于哪个分类,更重要的是得到物体在图片中的具体位置。
为了完成这两个任务,目标检测模型分为两类。一类是two-stage,将物体识别和物体定位分为两个步骤,分别完成,这一类的典型代表是R-CNN, fast R-CNN, faster-RCNN家族。他们识别错误率低,漏识别率也较低,但速度较慢,不能满足实时检测场景。为了解决这一问题,另一类方式出现了,称为one-stage, 典型代表是Yolo, SSD, YoloV2等。他们识别速度很快,可以达到实时性要求,而且准确率也基本能达到faster R-CNN的水平。下面针对这几种模型进行详细的分析。
2 R-CNN
2014年R-CNN算法被提出,基本奠定了two-stage方式在目标检测领域的应用。它的算法结构如下图
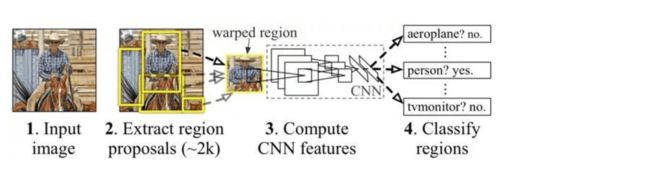
算法步骤如下
- 获取输入的原始图片
- 使用选择性搜索算法(selective search)评估相邻图像之间的相似度,把相似度高的进行合并,并对合并后的区块打分,选出感兴趣区域的候选框,也就是子图。这一步大约需要选出2000个子图。
- 分别对子图使用卷积神经网络,进行卷积-relu-池化以及全连接等步骤,提取特征。这一步基本就是物体识别的范畴了
- 对提取的特征进行物体分类,保留分类准确率高的区块,以作为最终的物体定位区块。
R-CNN较传统的目标检测算法获得了50%的性能提升,在使用VGG-16模型作为物体识别模型情况下,在voc2007数据集上可以取得66%的准确率,已经算还不错的一个成绩了。其最大的问题是速度很慢,内存占用量很大,主要原因有两个
- 候选框由传统的selective search算法完成,速度比较慢
- 对2000个候选框,均需要做物体识别,也就是需要做2000次卷积网络计算。这个运算量是十分巨大的。
3 Fast R-CNN
针对R-CNN的部分问题,2015年微软提出了fast R-CNN算法,它主要优化了两个问题
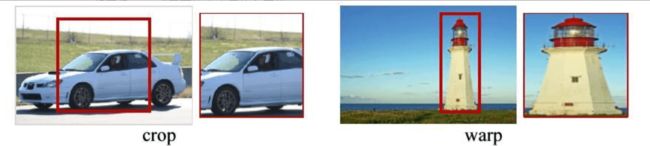
- 提出ROI pooling池化层结构,解决了候选框子图必须将图像裁剪缩放到相同尺寸大小的问题。由于CNN网络的输入图像尺寸必须是固定的某一个大小(否则全连接时没法计算),故R-CNN中对大小形状不同的候选框,进行了裁剪和缩放,使得他们达到相同的尺寸。这个操作既浪费时间,又容易导致图像信息丢失和形变。fast R-CNN在全连接层之前插入了ROI pooling层,从而不需要对图像进行裁剪,很好的解决了这个问题。
如下图,剪切会导致信息丢失,缩放会导致图像形变。
ROI pooling的思路是,如果最终我们要生成MxN的图片,那么先将特征图水平和竖直分为M和N份,然后每一份取最大值,输出MxN的特征图。这样就实现了固定尺寸的图片输出了。ROI pooling层位于卷积后,全连接前。
- 提出多任务损失函数思想,将分类损失和边框定位回归损失结合在一起统一训练,最终输出对应分类和边框坐标。
Fast R-CNN的结构如如下

4 Faster R-CNN
R-CNN和fast R-CNN均存在一个问题,那就是由选择性搜索来生成候选框,这个算法很慢。而且R-CNN中生成的2000个左右的候选框全部需要经过一次卷积神经网络,也就是需要经过2000次左右的CNN网络,这个是十分耗时的(fast R-CNN已经做了改进,只需要对整图经过一次CNN网络)。这也是导致这两个算法检测速度较慢的最主要原因。faster R-CNN 针对这个问题,提出了RPN网络来进行候选框的获取,从而摆脱了选择性搜索算法,也只需要一次卷积层操作,从而大大提高了识别速度。这个算法十分复杂,我们会详细分析。它的基本结构如下图
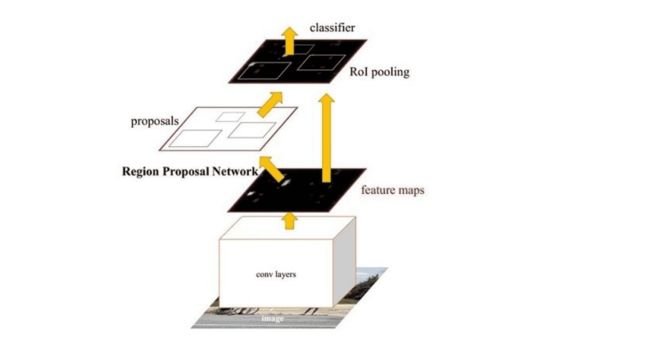
主要分为四个步骤
- 卷积层。原始图片先经过conv-relu-pooling的多层卷积神经网络,提取出特征图。供后续的RPN网络和全连接层使用。faster R-CNN不像R-CNN需要对每个子图进行卷积层特征提取,它只需要对全图进行一次提取就可以了,从而大大减小了计算时间。
- RPN层,region proposal networks。RPN层用于生成候选框,并利用softmax判断候选框是前景还是背景,从中选取前景候选框(因为物体一般在前景中),并利用bounding box regression调整候选框的位置,从而得到特征子图,称为proposals。
- ROI层,fast R-CNN中已经讲过了ROI层了,它将大小尺寸不同的proposal池化成相同的大小,然后送入后续的全连接层进行物体分类和位置调整回归
- 分类层。利用ROI层输出的特征图proposal,判断proposal的类别,同时再次对bounding box进行regression从而得到精确的形状和位置。
使用VGG-16卷积模型的网络结构如下图

4.1 卷积层
卷积层采用的VGG-16模型,先将PxQ的原始图片,缩放裁剪为MxN的图片,然后经过13个conv-relu层,其中会穿插4个max-pooling层。所有的卷积的kernel都是3x3的,padding为1,stride为1。pooling层kernel为2x2, padding为0,stride为2。
MxN的图片,经过卷积层后,变为了(M/16) x (N/16)的feature map了。
4.2 RPN层
faster R-CNN抛弃了R-CNN中的选择性搜索(selective search)方法,使用RPN层来生成候选框,能极大的提升候选框的生成速度。RPN层先经过3x3的卷积运算,然后分为两路。一路用来判断候选框是前景还是背景,它先reshape成一维向量,然后softmax来判断是前景还是背景,然后reshape恢复为二维feature map。另一路用来确定候选框的位置,通过bounding box regression实现,后面再详细讲。两路计算结束后,挑选出前景候选框(因为物体在前景中),并利用计算得到的候选框位置,得到我们感兴趣的特征子图proposal。
4.2.1 候选框的生成 anchors
卷积层提取原始图像信息,得到了256个feature map,经过RPN层的3x3卷积后,仍然为256个feature map。但是每个点融合了周围3x3的空间信息。对每个feature map上的一个点,生成k个anchor(k默认为9)。anchor分为前景和背景两类(我们先不去管它具体是飞机还是汽车,只用区分它是前景还是背景即可)。anchor有[x,y,w,h]四个坐标偏移量,x,y表示中心点坐标,w和h表示宽度和高度。这样,对于feature map上的每个点,就得到了k个大小形状各不相同的选区region。
4.2.2 softmax判断选区是前景还是背景
对于生成的anchors,我们首先要判断它是前景还是背景。由于感兴趣的物体位于前景中,故经过这一步之后,我们就可以舍弃背景anchors了。大部分的anchors都是属于背景,故这一步可以筛选掉很多无用的anchor,从而减少全连接层的计算量。
对于经过了3x3的卷积后得到的256个feature map,先经过1x1的卷积,变换为18个feature map。然后reshape为一维向量,经过softmax判断是前景还是背景。此处reshape的唯一作用就是让数据可以进行softmax计算。然后输出识别得到的前景anchors。
4.2.3 确定候选框位置
另一路用来确定候选框的位置,也就是anchors的[x,y,w,h]坐标值。如下图所示,红色代表我们当前的选区,绿色代表真实的选区。虽然我们当前的选取能够大概框选出飞机,但离绿色的真实位置和形状还是有很大差别,故需要对生成的anchors进行调整。这个过程我们称为bounding box regression。
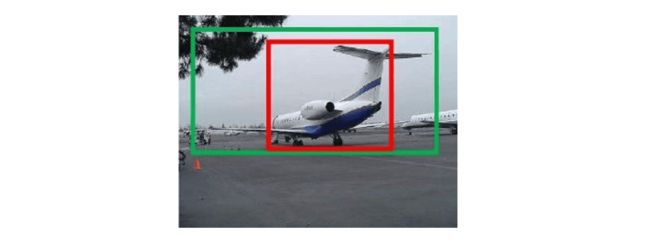
假设红色框的坐标为[x,y,w,h], 绿色框,也就是目标框的坐标为[Gx, Gy,Gw,Gh], 我们要建立一个变换,使得[x,y,w,h]能够变为[Gx, Gy,Gw,Gh]。最简单的思路是,先做平移,使得中心点接近,然后进行缩放,使得w和h接近。如下

我们要学习的就是dx dy dw dh这四个变换。由于是线性变换,我们可以用线性回归来建模。设定loss和优化方法后,就可以利用深度学习进行训练,并得到模型了。对于空间位置loss,我们一般采用均方差算法,而不是交叉熵(交叉熵使用在分类预测中)。优化方法可以采用自适应梯度下降算法Adam。
4.2.4 输出特征子图proposal
得到了前景anchors,并确定了他们的位置和形状后,我们就可以输出前景的特征子图proposal了。步骤如下
- 得到前景anchors和他们的[x y w h]坐标
- 按照anchors为前景的不同概率,从大到小排序,选取前pre_nms_topN个anchors,比如前6000个
- 剔除非常小的anchors
- 通过NMS非极大值抑制,从anchors中找出置信度较高的。这个主要是为了解决选取交叠问题。首先计算每一个选区面积,然后根据他们在softmax中的score(也就是是否为前景的概率)进行排序,将score最大的选区放入队列中。接下来,计算其余选区与当前最大score选区的IOU(IOU为两box交集面积除以两box并集面积,它衡量了两个box之间重叠程度)。去除IOU大于设定阈值的选区。这样就解决了选区重叠问题
- 选取前post_nms_topN个结果作为最终选区proposal进行输出,比如300个。
经过这一步之后,物体定位应该就基本结束了,剩下的就是物体识别了
4.3 ROI Pooling层
和fast R-CNN中类似,这一层主要解决之前得到的proposal大小形状各不相同,导致没法做全连接。全连接计算只能对确定的shape进行运算,故必须使proposal大小形状变为相同。通过裁剪和缩放的手段,可以解决这个问题,但会带来信息丢失和图片形变问题。我们使用ROI pooling可以有效的解决这个问题。
ROI pooling中,如果目标输出为MxN,则在水平和竖直方向上,将输入proposal划分为MxN份,每一份取最大值,从而得到MxN的输出特征图。
4.4 分类层
ROI Pooling层后的特征图,通过全连接层与softmax,就可以计算属于哪个具体类别,比如人,狗,飞机,并可以得到cls_prob概率向量。同时再次利用bounding box regression精细调整proposal位置,得到bbox_pred,用于回归更加精确的目标检测框。

这样就完成了faster R-CNN的整个过程了。算法还是相当复杂的,对于每个细节需要反复理解。faster R-CNN使用resNet101模型作为卷积层,在voc2012数据集上可以达到83.8%的准确率,超过yolo ssd和yoloV2。其最大的问题是速度偏慢,每秒只能处理5帧,达不到实时性要求。
5 Yolo:you only look once
针对于two-stage目标检测算法普遍存在的运算速度慢的缺点,yolo创造性的提出了one-stage。也就是将物体分类和物体定位在一个步骤中完成。yolo直接在输出层回归bounding box的位置和bounding box所属类别,从而实现one-stage。通过这种方式,yolo可实现45帧每秒的运算速度,完全能满足实时性要求(达到24帧每秒,人眼就认为是连续的)。它的网络结构如下图

主要分为三个部分:卷积层,目标检测层,NMS筛选层
5.1 卷积层
采用Google inceptionV1网络,对应到上图中的第一个阶段,共20层。这一层主要是进行特征提取,从而提高模型泛化能力。但作者对inceptionV1进行了改造,他没有使用inception module结构,而是用一个1x1的卷积,并联一个3x3的卷积来替代。(可以认为只使用了inception module中的一个分支,应该是为了简化网络结构)
5.2 目标检测层
先经过4个卷积层和2个全连接层,最后生成7x7x30的输出。先经过4个卷积层的目的是为了提高模型泛化能力。yolo将一副448x448的原图分割成了7x7个网格,每个网格要预测两个bounding box的坐标(x,y,w,h)和box内包含物体的置信度confidence,以及物体属于20类别中每一类的概率(yolo的训练数据为voc2012,它是一个20分类的数据集)。所以一个网格对应的参数为(4x2+2+20) = 30。如下图

- bounding box坐标: 如上图,7x7网格内的每个grid(红色框),对应两个大小形状不同的bounding box(黄色框)。每个box的位置坐标为(x,y,w,h), x和y表示box中心点坐标,w和h表示box宽度和高度。通过与训练数据集上标定的物体真实坐标(Gx,Gy,Gw,Gh)进行对比训练,可以计算出初始bounding box平移和伸缩得到最终位置的模型。
- bounding box置信度confidence:这个置信度只是为了表达box内有无物体的概率,并不表达box内物体是什么。
confidence=
其中前一项表示有无人工标记的物体落入了网格内,如果有则为1,否则为0。第二项代表bounding box和真实标记的box之间的重合度。它等于两个box面积交集,除以面积并集。值越大则box越接近真实位置。
- 分类信息:yolo的目标训练集为voc2012,它是一个20分类的目标检测数据集。常用目标检测数据集如下表
| Name | # Images (trainval) | # Classes | Last updated |
| --------------- | ------------------- | --------- | ------------ |
| ImageNet | 450k | 200 | 2015 |
| COCO | 120K | 90 | 2014 |
| Pascal VOC | 12k | 20 | 2012 |
| Oxford-IIIT Pet | 7K | 37 | 2012 |
| KITTI Vision | 7K | 3 | |
每个网格还需要预测它属于20分类中每一个类别的概率。分类信息是针对每个网格的,而不是bounding box。故只需要20个,而不是40个。而confidence则是针对bounding box的,它只表示box内是否有物体,而不需要预测物体是20分类中的哪一个,故只需要2个参数。虽然分类信息和confidence都是概率,但表达含义完全不同。
5.3 NMS筛选层
筛选层是为了在多个结果中(多个bounding box)筛选出最合适的几个,这个方法和faster R-CNN 中基本相同。都是先过滤掉score低于阈值的box,对剩下的box进行NMS非极大值抑制,去除掉重叠度比较高的box(NMS具体算法可以回顾上面faster R-CNN小节)。这样就得到了最终的最合适的几个box和他们的类别。
5.4 yolo损失函数
yolo的损失函数包含三部分,位置误差,confidence误差,分类误差。具体公式如下

误差均采用了均方差算法,其实我认为,位置误差应该采用均方差算法,而分类误差应该采用交叉熵。由于物体位置只有4个参数,而类别有20个参数,他们的累加和不同。如果赋予相同的权重,显然不合理。故yolo中位置误差权重为5,类别误差权重为1。由于我们不是特别关心不包含物体的bounding box,故赋予不包含物体的box的置信度confidence误差的权重为0.5,包含物体的权重则为1。
yolo算法开创了one-stage检测的先河,它将物体分类和物体检测网络合二为一,都在全连接层完成。故它大大降低了目标检测的耗时,提高了实时性。但它的缺点也十分明显
- 每个网格只对应两个bounding box,当物体的长宽比不常见(也就是训练数据集覆盖不到时),效果很差。
- 原始图片只划分为7x7的网格,当两个物体靠的很近时,效果很差
- 最终每个网格只对应一个类别,容易出现漏检(物体没有被识别到)。
- 对于图片中比较小的物体,效果很差。这其实是所有目标检测算法的通病,SSD对它有些优化,我们后面再看。
6 SSD: Single Shot MultiBox Detector
Faster R-CNN准确率mAP较高,漏检率recall较低,但速度较慢。而yolo则相反,速度快,但准确率和漏检率不尽人意。SSD综合了他们的优缺点,对输入300x300的图像,在voc2007数据集上test,能够达到58 帧每秒( Titan X 的 GPU ),72.1%的mAP。
SSD网络结构如下图

和yolo一样,也分为三部分:卷积层,目标检测层和NMS筛选层
6.1 卷积层
SSD论文采用了VGG16的基础网络,其实这也是几乎所有目标检测神经网络的惯用方法。先用一个CNN网络来提取特征,然后再进行后续的目标定位和目标分类识别。
6.2 目标检测层
这一层由5个卷积层和一个平均池化层组成。去掉了最后的全连接层。SSD认为目标检测中的物体,只与周围信息相关,它的感受野不是全局的,故没必要也不应该做全连接。SSD的特点如下
6.2.1 多尺寸feature map上进行目标检测
每一个卷积层,都会输出不同大小感受野的feature map。在这些不同尺度的feature map上,进行目标位置和类别的训练和预测,从而达到多尺度检测的目的,可以克服yolo对于宽高比不常见的物体,识别准确率较低的问题。而yolo中,只在最后一个卷积层上做目标位置和类别的训练和预测。这是SSD相对于yolo能提高准确率的一个关键所在。

如上所示,在每个卷积层上都会进行目标检测和分类,最后由NMS进行筛选,输出最终的结果。多尺度feature map上做目标检测,就相当于多了很多宽高比例的bounding box,可以大大提高泛化能力。
6.2.2 多个anchors,每个anchor对应4个位置参数和21个类别参数
和faster R-CNN相似,SSD也提出了anchor的概念。卷积输出的feature map,每个点对应为原图的一个区域的中心点。以这个点为中心,构造出6个宽高比例不同,大小不同的anchor(SSD中称为default box)。每个anchor对应4个位置参数(x,y,w,h)和21个类别概率(voc训练集为20分类问题,在加上anchor是否为背景,共21分类)。如下图所示

另外,在训练阶段,SSD将正负样本比例定位1:3。训练集给定了输入图像以及每个物体的真实区域(ground true box),将default box和真实box最接近的选为正样本。然后在剩下的default box中选择任意一个与真实box IOU大于0.5的,作为正样本。而其他的则作为负样本。由于绝大部分的box为负样本,会导致正负失衡,故根据每个box类别概率排序,使正负比例保持在1:3。SSD认为这个策略提高了4%的准确率
另外,SSD采用了数据增强。生成与目标物体真实box间IOU为0.1 0.3 0.5 0.7 0.9的patch,随机选取这些patch参与训练,并对他们进行随机水平翻转等操作。SSD认为这个策略提高了8.8%的准确率。
6.3 筛选层
和yolo的筛选层基本一致,同样先过滤掉类别概率低于阈值的default box,再采用NMS非极大值抑制,筛掉重叠度较高的。只不过SSD综合了各个不同feature map上的目标检测输出的default box。
SSD基本已经可以满足我们手机端上实时物体检测需求了,TensorFlow在Android上的目标检测官方模型ssd_mobilenet_v1_android_export.pb,就是通过SSD算法实现的。它的基础卷积网络采用的是mobileNet,适合在终端上部署和运行。
7 YoloV2, Yolo9000和其他模型
针对yolo准确率不高,容易漏检,对长宽比不常见物体效果差等问题,结合SSD的特点,提出了yoloV2。它主要还是采用了yolo的网络结构,在其基础上做了一些优化和改进,如下
- 网络采用DarkNet-19:19层,里面包含了大量3x3卷积,同时借鉴inceptionV1,加入1x1卷积核全局平均池化层。结构如下

- 去掉全连接层:和SSD一样,模型中只包含卷积和平均池化层(平均池化是为了变为一维向量,做softmax分类)。这样做一方面是由于物体检测中的目标,只是图片中的一个区块,它是局部感受野,没必要做全连接。而是为了输入不同尺寸的图片,如果采用全连接,则只能输入固定大小图片了。
- batch normalization:卷积层后加入BN,对下一次卷积输入的数据做归一化。可以在增大学习率的前提下,同样可以稳定落入局部最优解。从而加速训练收敛,在相同耗时下,增大了有效迭代次数。
- 使用anchors:借鉴faster R-CNN和SSD,对于一个中心点,使用多个anchor,得到多个bounding box,每个bounding box包含4个位置坐标参数(x y w h)和21个类别概率信息。而在yolo中,每个grid(对应anchor),仅预测一次类别,而且只有两个bounding box来进行坐标预测。
- pass through layer:yolo原本最终特征图为13x13x256。yoloV2还利用了之前的26x26的特征图进行目标检测。26x26x256的feature map分别按行和列隔点采样,得到4幅13x13x256的feature map,将他们组织成一幅13x13x2048的feature map。这样做的目的是提高小物体的识别率。因为越靠前的卷积,其感受野越小,越有利于小物体的识别。
- 高分辨率输入Training:yolo采用224x224图片进行预训练,而yoloV2则采用448x448
- Multi-Scale Training:输入不同尺寸的图片,迭代10次,就改变输入图片尺寸。由于模型中去掉了全连接层,故可以输入不同尺寸的图片了。从320x320,到608x608
yolo和yoloV2只能识别20类物体,为了优化这个问题,提出了yolo9000,可以识别9000类物体。它在yoloV2基础上,进行了imageNet和coco的联合训练。这种方式充分利用imageNet可以识别1000类物体和coco可以进行目标位置检测的优点。当使用imageNet训练时,只更新物体分类相关的参数。而使用coco时,则更新全部所有参数。

当前目标检测模型算法也是层出不穷。在two-stage领域,2017年Facebook提出了mask R-CNN。CMU也提出了A-Fast-RCNN 算法,将对抗学习引入到目标检测领域。Face++也提出了Light-Head R-CNN,主要探讨了 R-CNN 如何在物体检测中平衡精确度和速度。
one-stage领域也是百花齐放,2017年首尔大学提出 R-SSD 算法,主要解决小尺寸物体检测效果差的问题。清华大学提出了 RON 算法,结合 two stage 名的方法和 one stage 方法的优势,更加关注多尺度对象定位和负空间样本挖掘问题。
8 总结
目标检测领域的深度学习算法,需要进行目标定位和物体识别,算法相对来说还是很复杂的。当前各种新算法也是层不出穷,但模型之间有很强的延续性,大部分模型算法都是借鉴了前人的思想,站在巨人的肩膀上。我们需要知道经典模型的特点,这些tricks是为了解决什么问题,以及为什么解决了这些问题。这样才能举一反三,万变不离其宗。综合下来,目标检测领域主要的难点如下
- 检测速度:实时性要求高,故网络结构不能太复杂,参数不能太多,卷积层次也不能太多。
- 位置准确率:(x y w h)参数必须准确,也就是检测框大小尺寸要匹配,且重合度IOU要高。SSD和faster RCNN通过多个bounding box来优化这个问题
- 漏检率:必须尽量检测出所有目标物体,特别是靠的近的物体和尺寸小的物体。SSD和faster RCNN通过多个bounding box来优化这个问题
- 物体宽高比例不常见:SSD通过不同尺寸feature map,yoloV2通过不同尺寸输入图片,来优化这个问题。
- 靠的近的物体准确率低
- 小尺寸物体准确率低:SSD取消全连接层,yoloV2增加pass through layer,采用高分辨率输入图片,来优化这个问题。