鉴源实验室丨汽车电子电气架构演进和域控制器发展方向
作者 | Ted 上海控安革路工作室
来源 | 鉴源实验室
01
汽车电子和软件的发展
当下汽车工业正在经历过去几十年未曾经历的快速变更,伴随着电动化、智能化、网联化等趋势,未来汽车必将实现高度自动驾驶,汽车电子和软件正在深刻地影响着出行领域。
今天的汽车,正在运行着比大部分其他嵌入式系统更多的软件代码和逻辑,分布在汽车各个部分的电子控制单元(ECU,Electronic Control Unit),是这些软件的承载。数量众多,并且相互协作的ECU,通过信号交互有机地结合起来,最终实现车辆整体驾驶和控制。电子电气架构包含了车上所有的硬件、软件、传感器、执行机构、电子电气分配系统。

图 1
资料来源:KLA,五矿证券研究所
现在行业对于智能化趋势都形成了共识,智能化趋势下,如何将车内网络高效、有机、安全地组合起来,成为当下行业的一个关注重点。
智能化的发展,产生了:
(1)复杂且采集信息量日益增加的传感器,包括用于自动驾驶的视觉信息、激光雷达/毫米波雷达/超声雷达信息、以及大量传统的位置、电磁、电流、电压、温度等信息;
(2)大量执行器的数据,包括更高精度的电池管理大数据,更复杂的电机电控数据,底盘电子的转向刹车悬架等执行器高速信令和反馈,车身内外饰、灯光控制、门窗控制,空调舒适性控制;
(3)信息娱乐系统的大数据。
今天的智能汽车个体和群体,正在慢慢变成世界上最复杂庞大的传感器执行器网络之一,在这个传感器、执行器之后,将会伴随一个超级大脑,进行信息处理加工,软件是这个超级大脑的核心要素。
02
汽车智能化的一个趋势是
中央计算单元为中心的分布式架构
很多汽车行业从业者都熟悉了从分布式到集中式,再到域控制器的演进过程,我们的网络和媒体也给了很多介绍。本文要表达的是,汽车电子电气架构最终将服务到高度智能驾驶的方向,部分车辆会构建类似人脑+中枢神经+末端神经的方向。

图 2
目前国内外半导体厂商,都在开发设计面向智能汽车的拥有强大计算能力的车载计算中心芯片。这类芯片往往具有多核并行的CPU,有用于图形和图像处理的GPU,以及用于AI计算的各种加速器。
下图是英伟达ORIN的一个框图。

图 3
资料来源:知乎@汽车人参考
国内芯片厂商地平线、黑芝麻、芯驰等也纷纷推出了用于智能驾驶中央计算的芯片,越来越多的Tier1和OEM开始开发此类中央计算单元。
应用这些复杂计算能力的中央计算单元,将成为未来车辆信息处理软件的核心载体。
03
高带宽,面向服务等特性的总线网络
是适应下一代车内通讯的方向
目前车内通讯以金属介质导线为主,核心网络通讯主要包括CAN总线和以太网总线。
CAN是控制器域网(Controller Area Network)的简称,是由研发和生产汽车电子产品著称的德国BOSCH公司开发,并最终成为国际标准(ISO 11898)(来自百度百科)。从 1993 第一版 CAN 国际标准(ISO 11898:1993 和 ISO 11519-2)发布至今,CAN总线经受了稳定性安全性的考验,自身也在不断进步,在2015年引入了CAN FD(ISO 11898-1-2015),CAN FD允许通讯速率超过1Mbit/s(通常应用是2M或者5M),帧有效载荷也从8Byte限制演变成8-64Byte,较大地推动了数据交互效率。目前新一代毫米波雷达、新一代动力总成、新一代网关等,很多进行了CAN FD升级。
随着在2020年的第17届国际CAN大会(iCC)上,提出了CAN XL。CAN XL是一种高度可扩展的通信技术,涉及比特率和数据字段的长度,物理层仍在开发中,目标是实现高达10+Mbit/s的比特率。目前可以了解到的是帧长度支持1~2048Byte的可变长度。在必要时,可将以太网帧打包为CAN XL消息,直接或间接通过CAN XL使用IP通信技术。
车载以太网是为了满足越来越复杂和高带宽条件下将计算机网络引入汽车的一个成功应用。车载以太网的概念最初是由Broadcom提出,后来OPEN(单对以太网)联盟采纳了这一标准并承担起管理职责。OPEN推广Broadcom的100 Mbps BroadR-Reach作为多供应商许可解决方案。100 Mbps PHY实施借鉴了1 Gbps以太网的技术,能够在一对线缆上实现100 Mbps双向传输。
车载以太网协议是一组多个不同层次上的协议簇,是一个5层的协议系统,从上到下分别是应用层、传输层、网络层、数据链路层、物理层。5层结构对应于OSI参考模型,并且提供了各种协议框架下形成的协议簇及高层应用程序,区别于传统以太网,车载以太网的协议架构如下:
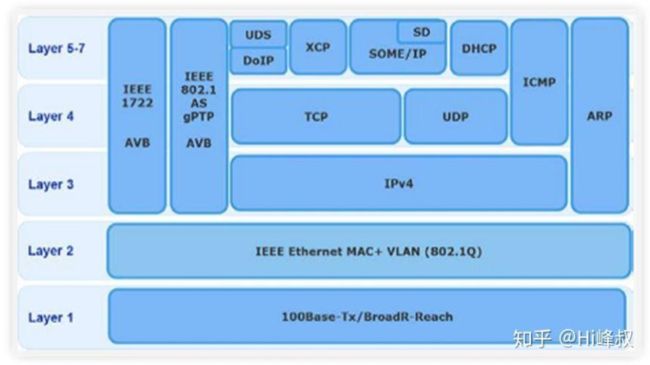
图 4
资料来源:知乎@Hi 峰叔
以太网网络相对于CAN网络的一个显著区别是总线拓扑。

图 5
CAN总线可以依赖一对双绞线,实现多个ECU节点直接通讯,仅仅在跨越子网的时候,需要网关转发或者过滤。实施成本较低。
以太网在一般情况下都需要依赖一个交换机(Switch),实现网络内ECU节点的信息交换。
车载总线网络在过去几年的快速迭代,开始为高等级自动驾驶做好准备。
04
信息安全是新一代电子电气架构下
通讯安全的保障
如本文前面章节所述,大数据量和高带宽支撑下的高等级自动驾驶车辆,技术高速迭代的同时,信息安全的保障是非常必须的。
目前在车载网络信息安全中,广泛研究和工程应用的包括如下一些:
(1)车载网络安全通讯
包括使用Secoc,TLS,IPSec等框架下的安全ECU间网络通讯。
(2)车辆软件和数据安全加密和签名
使用非对称加密算法为核心的PKI基础设施、软件签名。进行软件OTA安全管理。
(3)车载内嵌安全HSM研究
针对ECU内部计算单元的硬件安全加密模块,及对应的算法和软件驱动等管理。
(4)IDPS入侵检测及防护
IDPS提供监视系统是否存在恶意活动的软件应用程序或设备,根据OEM的能力,IDPS可以分为两部分:IDS与IPS。IDS的重点仅在发现此类活动时发出警报。IPS则尝试防止检测到的某些入侵。
信息安全是车辆全生命周期安全的一个重要保障,越高等级的自动驾驶,越需要信息安全的保障。