- 《python基于时间序列分析的降雨量预测系统》毕业设计项目
陈辰学长
python课程设计开发语言
大家好,我是陈辰学长,一名在Java圈辛勤劳作的码农。今日要和大家分享的是一款《python基于时间序列分析的降雨量预测系统》毕业设计项目。项目源码以及部署相关事宜,请联系陈辰学长,文末会附上联系信息哦。作者:陈辰学长个人简介:在Java领域已沉浸十余年,对Java、微信小程序、Python、Android等技术颇为精通。若大家在这些领域有任何问题,欢迎一起交流探讨!各类成品Java毕业设计丰富多
- dlib库的whl文件下载
杭林菲
dlib库的whl文件下载【下载地址】dlib库的whl文件下载dlib库的whl文件下载项目地址:https://gitcode.com/open-source-toolkit/f2aaf资源文件介绍本仓库提供了一个dlib库的whl文件下载,文件名为:dlib-19.7.0-cp36-cp36m-win_amd64.rar。该文件适用于Windows64位系统,Python版本为3.6。文件描
- chatgpt赋能python:用Python安装Jupyter:让数据科学变得更加高效!
aijinglingchat
ChatGptpythonchatgptjupyter计算机
用Python安装Jupyter:让数据科学变得更加高效!对于数据科学家而言,jupyter是不可或缺的工具之一。它是一个基于web的交互式计算环境,可以帮助我们在Python中以一种轻松、方便、可交互的方式进行编程和数据分析。今天,我们将向您介绍在Python中如何安装jupyter。安装Python要安装jupyter,首先需要安装Python。如果您已经安装了Python,请跳到下一步。您可
- [dlib][python]dlib所有whl文件下载地址汇总
Xiao张不会深度学习
python开发语言深度学习
dlib库的wheel文件3.7-3.12GitHub-z-mahmud22/Dlib_Windows_Python3.x:Dlibcompiledbinary(.whl)forPython3.7-3.12andWindowsx64这里存储了适用于python3.7-3.12的wheel文件下载wheel文件之后,比如:dlib-19.22.99-cp310-cp310-win_amd64.whl
- Python剪辑视频小妙招(moivepy库)
对不起,我辜负了你
python
起因最近一直在b站上投稿喜羊羊与灰太狼的视频,但是苦于需要手动裁剪视频的片头和片尾,裁剪的多了就发现喜羊羊与灰太狼的视频片头几乎都是1分25秒结束,也就是持续85秒,片尾也差不多是持续1分02秒差不多也就是62秒,于是开始思考有没有什么方法可以替代人类进行自动化批量裁剪?思路发展迭代与确定一开始是想使用Premier里面的预设来做的,结果发现Premier里面高版本的导出变成了各种网站的标准,相比
- Python 实战-优化排班表节省成本
奔向理想的星辰大海
技术研发pythoniosobjective-c
1.基础概念:理解排班表排班表,顾名思义,就是安排员工工作时间的表格。在餐馆中,它通常需要考虑员工的可用性、工作时间限制、用餐高峰时段等因素。2.使用列表存储员工信息首先,我们需要一个数据结构来存储员工信息。Python中的列表是一个不错的选择。#员工信息列表,包括姓名、可用时间段employees=[{"name":"张三","available":[(9,17),(20,23)]},{"nam
- No module named ‘moviepy.editor‘
weixin_66009678
python
python3.7版本后不支持frommoviepy.editor引用方式,由于是moviepy2.0.0版本修改方法:frommoviepy.editorimportVideoFileClip,clips_array改为frommoviepyimport*
- 安装python3.12.2环境(实验机器银河麒麟高级服务器)
Red丶哞
桌面运维Pythonlinux运维服务器
1.下载官网Python安装包wgethttps://www.python.org/ftp/python/3.12.2/Python-3.12.2.tar.xz1.1解压tar-xfPython-3.12.2.tar.xz解压完后切换到Python-3.12.2文件夹(这里根据自己解压的文件夹路径)cd/usr/packages/Python-3.12.2/1.2升级软件包管理器CentOS系统:
- 自己动手写CPU - 6
qq85058522
自己动手写CPUfpga开发
自己动手写CPU_qq85058522的博客-CSDN博客CPU不加功能了,但汇编器可以有。下面写一个把汇编(助记符)翻译成机器码的小工具。Python熟些,就用它了。很简单,就是字符串替换。直接上代码。importsysiflen(sys.argv)!=2:print("usage:pythonassemblerxxx.asm")exit(0)code_path=sys.argv[1]print
- ros2_control 6 自由度机械臂
kuan_li_lyg
ROS&ROS2机器人人工智能ROS机械臂控制工程算法
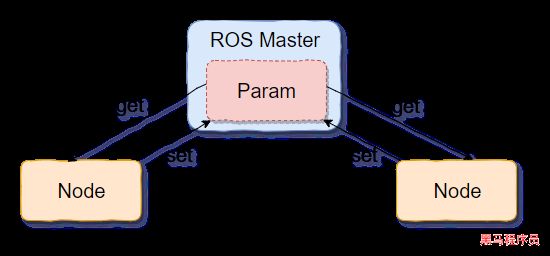
系列文章目录前言ros2_control是一个实时控制框架,专为普通机器人应用而设计。标准的c++接口用于与硬件交互和查询用户定义的控制器命令。这些接口增强了代码的模块化和与机器人无关的设计。具体的应用细节,例如使用什么控制器、机器人有多少个关节以及它们的运动学结构,则通过YAML参数配置文件和通用机器人描述文件(URDF)来指定。最后,通过ROS2启动文件部署ros2_control框架。本教程
- 如何安装python3.7.4_银河麒麟安装Python3.7.4以及升级自带OpenSSL
weixin_39873191
如何安装python3.7.4
银河麒麟安装Python3.7.4以及升级自带OpenSSL升级OpenSSL1.下载opensslwgethttps://www.openssl.org/source/openssl-1.1.1a.tar.gztar-zxvfopenssl-1.1.1a.tar.gzcdopenssl-1.1.1a2.编译安装./config--prefix=/usr/local/opensslno-zlib#
- python多进程编程_深入理解python多进程编程
weixin_39620001
python多进程编程
1、python多进程编程背景python中的多进程最大的好处就是充分利用多核cpu的资源,不像python中的多线程,受制于GIL的限制,从而只能进行cpu分配,在python的多进程中,适合于所有的场合,基本上能用多线程的,那么基本上就能用多进程。在进行多进程编程的时候,其实和多线程差不多,在多线程的包threading中,存在一个线程类Thread,在其中有三种方法来创建一个线程,启动线程,
- python多进程编程实例_Python多进程编程multiprocessing代码实例
weixin_39791386
python多进程编程实例
在多线程与多进程的比较这一篇中记录了多进程编程的一种方式.下面记录一下多进程编程的别一种方式,即使用multiprocessing编程importmultiprocessingimporttimedefget_html(n):time.sleep(n)print('subprocess%s'%n)returnnif__name__=='__main__':#多进程编程process=multipr
- python打开一个软件并进行操作_模拟试卷 B
weixin_39551611
原标题:模拟试卷B一、单项选择题1.关于算法的描述,以下选项中错误的是算法是指解题方案的准确而完整的描述算法具有可行性、确定性、有穷性的基本特征算法的复杂度主要包括时间复杂度和数据复杂度算法的基本要素包括数据对象的运算和操作及算法的控制结构2.关于数据结构的描述,以下选项中正确的是数据结构指相互有关联的数据元素的集合数据的存储结构是指反映数据元素之间逻辑关系的数据结构数据的逻辑结构有顺序、链接、索
- python之openpyxl模块
weixin_34248849
python数据结构与算法测试
一.Python操作EXCEL库的简介1.1Python官方库操作excelPython官方库一般使用xlrd库来读取Excel文件,使用xlwt库来生成Excel文件,使用xlutils库复制和修改Excel文件,这三个库只支持到Excel2003。1.2第三方库openpyxl介绍第三方库openpyxl(可读写excel表),专门处理Excel2007及以上版本产生的xlsx文件,xls和x
- SOA 术语概述,第 2 部分: 开发流程、模型和资产
rochening
soaumlibmeclipse工作平台
文档选项将此页作为电子邮件发送拓展Tomcat应用下载IBM开源J2EE应用服务器WASCE新版本V1.1级别:初级BertrandPortier(
[email protected]),IT架构师,IBM,Intel,Microsoft,HP2007年5月23日了解一些基本SOA术语。本文是本系列的第2部分,BertrandPortier将在其中定义一些术语(包括开发流程、模型和资产)并说明为
- python使用多进程multiprocessing
小蜗笔记
pythonpython
python使用多进程multiprocessing1多进程解释2进程的演示3进程池方法4pool.map()的解析pool.map()的基本用法返回值语法示例注意事项适用场景5pool.join()详解示例注意事项pool.join()的运行逻辑阻塞特性的影响对计算速度的影响示例总结6apply_async(),apply(),和pool.map()`apply_async()`特性:语法:`a
- centos下安裝python
白小白的小白
pythonpythoncentos
更新系统文件yumupdateyuminstallzlib-develbzip2-developenssl-develncurses-develsqlite-develreadline-develtk-devellibffi-develgccmake下载安装包并解压wgethttps://www.python.org/ftp/python/3.7.6/Python-3.7.6.tar.xztar-
- 将python文件(.py)打包为可执行文件(.exe)的多种方法,看这一篇就够了,万字教学,全网最全!!!
盲敲代码的阿豪
python实用知识点python可执行程序代码打包
文章目录前言1、PyInstaller库的使用(最简单,常用)1.1安装PyInstaller1.2常用参数及使用1.3其它参数(了解)1.4案例演示2、cx_Freeze库的使用2.1安装cx_Freeze2.2创建打包脚本2.3运行打包文件2.4参数说明2.5案例演示3、py2exe库的使用3.1安装py2exe3.2创建打包脚本3.3运行打包文件3.4参数说明3.5案例演示3.6常见问题4、
- 通过python代码实现向钉钉群内自动推送消息,详细步骤及代码,超实用教学!!!
盲敲代码的阿豪
python实用知识点python钉钉自动化发消息
文章目录前言一、创建钉钉群机器人二、以文本格式发送信息三、以MarkDown格式发送信息四、以Link格式发送信息前言我们在使用钉钉时,通常会创建或加入多个群聊,身为群聊的管理者,当我们需要及时、并按时的向这些群聊推送一些固定信息,若通过人力来解决肯定非常耗时、耗力,这时我们就可以考虑开发一个自动化脚本来实现这个功能,本篇文章我将教会大家,如何使用python开发程序,实现向钉钉群内自动发送消息。
- Python3-excel文档操作(二):利用openpyxl库处理excel表格:在excel表格中插入图片
liranke
Python学习笔记pythonopenpyxlpython处理excelload_workbook
1.简介excel表中可以插入图片,使用openpyxl库可以实现这个功能。2.代码:#-*-coding:utf-8-*-importosimportsysimporttimeimportopenpyxlfromopenpyxlimportload_workbookfromopenpyxl.drawing.imageimportImagedefopenxls_insert_img(fname,i
- 基于Python的多元医疗知识图谱构建与应用研究(上)
Allen_LVyingbo
python医疗高效编程研发python知识图谱健康医疗
一、引言1.1研究背景与意义在当今数智化时代,医疗数据呈爆发式增长,如何高效管理和利用这些数据,成为提升医疗服务质量的关键。传统医疗数据管理方式存在数据孤岛、信息整合困难等问题,难以满足现代医疗对精准诊断和个性化治疗的需求。知识图谱作为一种知识表示和管理技术,为医疗领域带来了新的解决方案。它能够将海量的医疗信息以结构化、语义化的方式组织起来,揭示疾病、症状、药物、治疗方法等实体之间的复杂关系,从而
- 学习ASP.NET Core的身份认证(基于JwtBearer的身份认证1)
gc_2299
网页编程JWT身份认证JwtBear
本文开始学习基于JWT的身份认证基本用法,相比Cookie、Session等方式,JWT要复杂一些,除了注册认证服务之外,还需提供JWTToken的生成函数或生成类,以便在访问需授权的函数之前获取Token。参考文献1-7中大部分示例都是基于WebApi项目,本文基于Microsoft.AspNetCore.Authentication.JwtBearer包,参照参考文献中的代码,实现最简单的
- PostgreSQL - pgvector 插件构建向量数据库并进行相似度查询
花千树-010
RAG数据库postgresqlAI编程
在现代的机器学习和人工智能应用中,向量相似度检索是一个非常重要的技术,尤其是在文本、图像或其他类型的嵌入向量的操作中。本文将介绍如何在PostgreSQL中安装pgvector插件,用于存储和检索向量数据,并展示如何通过Python脚本向数据库插入向量并执行相似度查询。一、安装PostgreSQL并配置pgvector插件1.安装PostgreSQL首先,确保你已经安装了PostgreSQL。可以
- MoviePy视频编辑和处理Python库的版本问题解决:No module named ‘moviepy.editor‘
封步宇AIGC
文字音频视频自动化工具python音视频ffmpeg人工智能
MoviePy是一个强大的Python库,用于视频编辑和处理。它支持多种基本操作,如视频剪切、拼接、插入标题,以及更高级的视频合成(非线性编辑)、视频处理和自定义特效创建。MoviePy能够读写包括GIF在内的常见音频和视频格式,并且兼容Windows、Mac和Linux操作系统,支持Python2.7和3.x版本MoviePy基于ffmpeg和ImageMagick,提供了易于使用的API,能够
- 《CPython Internals》阅读笔记:p177-p220
codists
读书笔记python
《CPythonInternals》学习第11天,p177-p220总结,总计44页。一、技术总结1.memoryallocationinC(1)staticmemeoryallocationMemoryrequirementsarecalculatedatcompiletimeandallocatedbytheexecutablewhenitstarts.(2)automaticmemeorya
- 厦门租房信息分析展示(pycharm+python爬虫+pyspark+pyecharts)(踩坑记录)
吃西红柿的鸡蛋
大数据hadoopsparkpython
厦门租房信息分析展示(pycharm+python爬虫+pyspark+pyecharts)(踩坑记录)项目地址http://dblab.xmu.edu.cn/blog/2307/踩坑:Spark分析文件rent_analyse.py改变Spark读取csv文件的写法sparkContext=SparkContext("local","rent_analyse")sqlContext=SQLCon
- 《CPython Internals》阅读笔记:p250-p284
python
《CPythonInternals》学习第14天,250-p284总结,总计25页。一、技术总结介于我觉得作者写得乱七八糟的,读完我已经不想说话了,所以今日无技术总结。二、英语总结(生词:2)1.spawn(1)spawn:来自于词根expandere。(2)expandere:ex-("out")+pandere("tospread")spawn原来的意思是“spreadingoutoffish
- Python使用moviepy模块编辑视频时,有可能会出现“TypeError: ‘module‘ object is not callable”的错误提示
CodeWG
python开发语言
Python使用moviepy模块编辑视频时,有可能会出现“TypeError:‘module‘objectisnotcallable”的错误提示。这个错误提示表明在调用函数或方法时,试图调用一个不可被调用的对象。这个问题通常是由于导入moviepy模块时,模块本身并不是可以被调用的对象而导致的。要解决这个问题,我们需要检查代码中导入moviepy模块的语句是否有误。moviepy模块中最常用的类
- 使用PyCharm运行Python程序
代码艺术巧匠
pythonpycharmjavaPython
使用PyCharm运行Python程序PyCharm是一种功能强大的Python集成开发环境(IDE),它提供了许多方便的功能来开发、调试和运行Python程序。在本文中,我将向您展示如何使用PyCharm来运行Python程序,并提供相应的源代码示例。步骤1:安装PyCharm首先,您需要从JetBrains官方网站下载并安装PyCharm。根据您的操作系统,选择适合您的版本。安装过程非常简单,
- Java实现的简单双向Map,支持重复Value
superlxw1234
java双向map
关键字:Java双向Map、DualHashBidiMap
有个需求,需要根据即时修改Map结构中的Value值,比如,将Map中所有value=V1的记录改成value=V2,key保持不变。
数据量比较大,遍历Map性能太差,这就需要根据Value先找到Key,然后去修改。
即:既要根据Key找Value,又要根据Value
- PL/SQL触发器基础及例子
百合不是茶
oracle数据库触发器PL/SQL编程
触发器的简介;
触发器的定义就是说某个条件成立的时候,触发器里面所定义的语句就会被自动的执行。因此触发器不需要人为的去调用,也不能调用。触发器和过程函数类似 过程函数必须要调用,
一个表中最多只能有12个触发器类型的,触发器和过程函数相似 触发器不需要调用直接执行,
触发时间:指明触发器何时执行,该值可取:
before:表示在数据库动作之前触发
- [时空与探索]穿越时空的一些问题
comsci
问题
我们还没有进行过任何数学形式上的证明,仅仅是一个猜想.....
这个猜想就是; 任何有质量的物体(哪怕只有一微克)都不可能穿越时空,该物体强行穿越时空的时候,物体的质量会与时空粒子产生反应,物体会变成暗物质,也就是说,任何物体穿越时空会变成暗物质..(暗物质就我的理
- easy ui datagrid上移下移一行
商人shang
js上移下移easyuidatagrid
/**
* 向上移动一行
*
* @param dg
* @param row
*/
function moveupRow(dg, row) {
var datagrid = $(dg);
var index = datagrid.datagrid("getRowIndex", row);
if (isFirstRow(dg, row)) {
- Java反射
oloz
反射
本人菜鸟,今天恰好有时间,写写博客,总结复习一下java反射方面的知识,欢迎大家探讨交流学习指教
首先看看java中的Class
package demo;
public class ClassTest {
/*先了解java中的Class*/
public static void main(String[] args) {
//任何一个类都
- springMVC 使用JSR-303 Validation验证
杨白白
springmvc
JSR-303是一个数据验证的规范,但是spring并没有对其进行实现,Hibernate Validator是实现了这一规范的,通过此这个实现来讲SpringMVC对JSR-303的支持。
JSR-303的校验是基于注解的,首先要把这些注解标记在需要验证的实体类的属性上或是其对应的get方法上。
登录需要验证类
public class Login {
@NotEmpty
- log4j
香水浓
log4j
log4j.rootCategory=DEBUG, STDOUT, DAILYFILE, HTML, DATABASE
#log4j.rootCategory=DEBUG, STDOUT, DAILYFILE, ROLLINGFILE, HTML
#console
log4j.appender.STDOUT=org.apache.log4j.ConsoleAppender
log4
- 使用ajax和history.pushState无刷新改变页面URL
agevs
jquery框架Ajaxhtml5chrome
表现
如果你使用chrome或者firefox等浏览器访问本博客、github.com、plus.google.com等网站时,细心的你会发现页面之间的点击是通过ajax异步请求的,同时页面的URL发生了了改变。并且能够很好的支持浏览器前进和后退。
是什么有这么强大的功能呢?
HTML5里引用了新的API,history.pushState和history.replaceState,就是通过
- centos中文乱码
AILIKES
centosOSssh
一、CentOS系统访问 g.cn ,发现中文乱码。
于是用以前的方式:yum -y install fonts-chinese
CentOS系统安装后,还是不能显示中文字体。我使用 gedit 编辑源码,其中文注释也为乱码。
后来,终于找到以下方法可以解决,需要两个中文支持的包:
fonts-chinese-3.02-12.
- 触发器
baalwolf
触发器
触发器(trigger):监视某种情况,并触发某种操作。
触发器创建语法四要素:1.监视地点(table) 2.监视事件(insert/update/delete) 3.触发时间(after/before) 4.触发事件(insert/update/delete)
语法:
create trigger triggerName
after/before
- JS正则表达式的i m g
bijian1013
JavaScript正则表达式
g:表示全局(global)模式,即模式将被应用于所有字符串,而非在发现第一个匹配项时立即停止。 i:表示不区分大小写(case-insensitive)模式,即在确定匹配项时忽略模式与字符串的大小写。 m:表示
- HTML5模式和Hashbang模式
bijian1013
JavaScriptAngularJSHashbang模式HTML5模式
我们可以用$locationProvider来配置$location服务(可以采用注入的方式,就像AngularJS中其他所有东西一样)。这里provider的两个参数很有意思,介绍如下。
html5Mode
一个布尔值,标识$location服务是否运行在HTML5模式下。
ha
- [Maven学习笔记六]Maven生命周期
bit1129
maven
从mvn test的输出开始说起
当我们在user-core中执行mvn test时,执行的输出如下:
/software/devsoftware/jdk1.7.0_55/bin/java -Dmaven.home=/software/devsoftware/apache-maven-3.2.1 -Dclassworlds.conf=/software/devs
- 【Hadoop七】基于Yarn的Hadoop Map Reduce容错
bit1129
hadoop
运行于Yarn的Map Reduce作业,可能发生失败的点包括
Task Failure
Application Master Failure
Node Manager Failure
Resource Manager Failure
1. Task Failure
任务执行过程中产生的异常和JVM的意外终止会汇报给Application Master。僵死的任务也会被A
- 记一次数据推送的异常解决端口解决
ronin47
记一次数据推送的异常解决
需求:从db获取数据然后推送到B
程序开发完成,上jboss,刚开始报了很多错,逐一解决,可最后显示连接不到数据库。机房的同事说可以ping 通。
自已画了个图,逐一排除,把linux 防火墙 和 setenforce 设置最低。
service iptables stop
- 巧用视错觉-UI更有趣
brotherlamp
UIui视频ui教程ui自学ui资料
我们每个人在生活中都曾感受过视错觉(optical illusion)的魅力。
视错觉现象是双眼跟我们开的一个玩笑,而我们往往还心甘情愿地接受我们看到的假象。其实不止如此,视觉错现象的背后还有一个重要的科学原理——格式塔原理。
格式塔原理解释了人们如何以视觉方式感觉物体,以及图像的结构,视角,大小等要素是如何影响我们的视觉的。
在下面这篇文章中,我们首先会简单介绍一下格式塔原理中的基本概念,
- 线段树-poj1177-N个矩形求边长(离散化+扫描线)
bylijinnan
数据结构算法线段树
package com.ljn.base;
import java.util.Arrays;
import java.util.Comparator;
import java.util.Set;
import java.util.TreeSet;
/**
* POJ 1177 (线段树+离散化+扫描线),题目链接为http://poj.org/problem?id=1177
- HTTP协议详解
chicony
http协议
引言
- Scala设计模式
chenchao051
设计模式scala
Scala设计模式
我的话: 在国外网站上看到一篇文章,里面详细描述了很多设计模式,并且用Java及Scala两种语言描述,清晰的让我们看到各种常规的设计模式,在Scala中是如何在语言特性层面直接支持的。基于文章很nice,我利用今天的空闲时间将其翻译,希望大家能一起学习,讨论。翻译
- 安装mysql
daizj
mysql安装
安装mysql
(1)删除linux上已经安装的mysql相关库信息。rpm -e xxxxxxx --nodeps (强制删除)
执行命令rpm -qa |grep mysql 检查是否删除干净
(2)执行命令 rpm -i MySQL-server-5.5.31-2.el
- HTTP状态码大全
dcj3sjt126com
http状态码
完整的 HTTP 1.1规范说明书来自于RFC 2616,你可以在http://www.talentdigger.cn/home/link.php?url=d3d3LnJmYy1lZGl0b3Iub3JnLw%3D%3D在线查阅。HTTP 1.1的状态码被标记为新特性,因为许多浏览器只支持 HTTP 1.0。你应只把状态码发送给支持 HTTP 1.1的客户端,支持协议版本可以通过调用request
- asihttprequest上传图片
dcj3sjt126com
ASIHTTPRequest
NSURL *url =@"yourURL";
ASIFormDataRequest*currentRequest =[ASIFormDataRequest requestWithURL:url];
[currentRequest setPostFormat:ASIMultipartFormDataPostFormat];[currentRequest se
- C语言中,关键字static的作用
e200702084
C++cC#
在C语言中,关键字static有三个明显的作用:
1)在函数体,局部的static变量。生存期为程序的整个生命周期,(它存活多长时间);作用域却在函数体内(它在什么地方能被访问(空间))。
一个被声明为静态的变量在这一函数被调用过程中维持其值不变。因为它分配在静态存储区,函数调用结束后并不释放单元,但是在其它的作用域的无法访问。当再次调用这个函数时,这个局部的静态变量还存活,而且用在它的访
- win7/8使用curl
geeksun
win7
1. WIN7/8下要使用curl,需要下载curl-7.20.0-win64-ssl-sspi.zip和Win64OpenSSL_Light-1_0_2d.exe。 下载地址:
http://curl.haxx.se/download.html 请选择不带SSL的版本,否则还需要安装SSL的支持包 2. 可以给Windows增加c
- Creating a Shared Repository; Users Sharing The Repository
hongtoushizi
git
转载自:
http://www.gitguys.com/topics/creating-a-shared-repository-users-sharing-the-repository/ Commands discussed in this section:
git init –bare
git clone
git remote
git pull
git p
- Java实现字符串反转的8种或9种方法
Josh_Persistence
异或反转递归反转二分交换反转java字符串反转栈反转
注:对于第7种使用异或的方式来实现字符串的反转,如果不太看得明白的,可以参照另一篇博客:
http://josh-persistence.iteye.com/blog/2205768
/**
*
*/
package com.wsheng.aggregator.algorithm.string;
import java.util.Stack;
/**
- 代码实现任意容量倒水问题
home198979
PHP算法倒水
形象化设计模式实战 HELLO!架构 redis命令源码解析
倒水问题:有两个杯子,一个A升,一个B升,水有无限多,现要求利用这两杯子装C
- Druid datasource
zhb8015
druid
推荐大家使用数据库连接池 DruidDataSource. http://code.alibabatech.com/wiki/display/Druid/DruidDataSource DruidDataSource经过阿里巴巴数百个应用一年多生产环境运行验证,稳定可靠。 它最重要的特点是:监控、扩展和性能。 下载和Maven配置看这里: http
- 两种启动监听器ApplicationListener和ServletContextListener
spjich
javaspring框架
引言:有时候需要在项目初始化的时候进行一系列工作,比如初始化一个线程池,初始化配置文件,初始化缓存等等,这时候就需要用到启动监听器,下面分别介绍一下两种常用的项目启动监听器
ServletContextListener
特点: 依赖于sevlet容器,需要配置web.xml
使用方法:
public class StartListener implements
- JavaScript Rounding Methods of the Math object
何不笑
JavaScriptMath
The next group of methods has to do with rounding decimal values into integers. Three methods — Math.ceil(), Math.floor(), and Math.round() — handle rounding in differen