旋转的样条插值方法
旋转的样条插值:Slerp方法的插值结果较为平庸,无法保证速度的光滑性和加速度的连续性,因而两端动作的拼接过程通常需要进行Spline插值。
Examples
>>> from scipy.spatial.transform import Rotation, RotationSpline
>>> import numpy as npDefine the sequence of times and rotations from the Euler angles:
>>> times = [0, 10, 20, 40]
>>> angles = [[-10, 20, 30], [0, 15, 40], [-30, 45, 30], [20, 45, 90]]
>>> rotations = Rotation.from_euler('XYZ', angles, degrees=True)Create the interpolator object:
>>> spline = RotationSpline(times, rotations)Interpolate the Euler angles, angular rate and acceleration:
>>> angular_rate = np.rad2deg(spline(times, 1))
>>> angular_acceleration = np.rad2deg(spline(times, 2))
>>> times_plot = np.linspace(times[0], times[-1], 100)
>>> angles_plot = spline(times_plot).as_euler('XYZ', degrees=True)
>>> angular_rate_plot = np.rad2deg(spline(times_plot, 1))
>>> angular_acceleration_plot = np.rad2deg(spline(times_plot, 2))On this plot you see that Euler angles are continuous and smooth:
>>> import matplotlib.pyplot as plt
>>> plt.plot(times_plot, angles_plot)
>>> plt.plot(times, angles, 'x')
>>> plt.title("Euler angles")
>>> plt.show()

The angular rate is also smooth:
>>> plt.plot(times_plot, angular_rate_plot)
>>> plt.plot(times, angular_rate, 'x')
>>> plt.title("Angular rate")
>>> plt.show()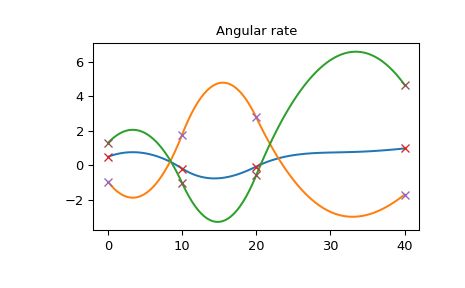
The angular acceleration is continuous, but not smooth. Also note that the angular acceleration is not a piecewise-linear function, because it is different from the second derivative of the rotation vector (which is a piecewise-linear function as in the cubic spline).
>>> plt.plot(times_plot, angular_acceleration_plot)
>>> plt.plot(times, angular_acceleration, 'x')
>>> plt.title("Angular acceleration")
>>> plt.show()
import numpy as np
from scipy.linalg import solve_banded
from .rotation import Rotation
def _create_skew_matrix(x):
"""Create skew-symmetric matrices corresponding to vectors.
Parameters
----------
x : ndarray, shape (n, 3)
Set of vectors.
Returns
-------
ndarray, shape (n, 3, 3)
"""
result = np.zeros((len(x), 3, 3))
result[:, 0, 1] = -x[:, 2]
result[:, 0, 2] = x[:, 1]
result[:, 1, 0] = x[:, 2]
result[:, 1, 2] = -x[:, 0]
result[:, 2, 0] = -x[:, 1]
result[:, 2, 1] = x[:, 0]
return result
def _matrix_vector_product_of_stacks(A, b):
"""Compute the product of stack of matrices and vectors."""
return np.einsum("ijk,ik->ij", A, b)
def _angular_rate_to_rotvec_dot_matrix(rotvecs):
"""Compute matrices to transform angular rates to rot. vector derivatives.
The matrices depend on the current attitude represented as a rotation
vector.
Parameters
----------
rotvecs : ndarray, shape (n, 3)
Set of rotation vectors.
Returns
-------
ndarray, shape (n, 3, 3)
"""
norm = np.linalg.norm(rotvecs, axis=1)
k = np.empty_like(norm)
mask = norm > 1e-4
nm = norm[mask]
k[mask] = (1 - 0.5 * nm / np.tan(0.5 * nm)) / nm**2
mask = ~mask
nm = norm[mask]
k[mask] = 1/12 + 1/720 * nm**2
skew = _create_skew_matrix(rotvecs)
result = np.empty((len(rotvecs), 3, 3))
result[:] = np.identity(3)
result[:] += 0.5 * skew
result[:] += k[:, None, None] * np.matmul(skew, skew)
return result
def _rotvec_dot_to_angular_rate_matrix(rotvecs):
"""Compute matrices to transform rot. vector derivatives to angular rates.
The matrices depend on the current attitude represented as a rotation
vector.
Parameters
----------
rotvecs : ndarray, shape (n, 3)
Set of rotation vectors.
Returns
-------
ndarray, shape (n, 3, 3)
"""
norm = np.linalg.norm(rotvecs, axis=1)
k1 = np.empty_like(norm)
k2 = np.empty_like(norm)
mask = norm > 1e-4
nm = norm[mask]
k1[mask] = (1 - np.cos(nm)) / nm ** 2
k2[mask] = (nm - np.sin(nm)) / nm ** 3
mask = ~mask
nm = norm[mask]
k1[mask] = 0.5 - nm ** 2 / 24
k2[mask] = 1 / 6 - nm ** 2 / 120
skew = _create_skew_matrix(rotvecs)
result = np.empty((len(rotvecs), 3, 3))
result[:] = np.identity(3)
result[:] -= k1[:, None, None] * skew
result[:] += k2[:, None, None] * np.matmul(skew, skew)
return result
def _angular_acceleration_nonlinear_term(rotvecs, rotvecs_dot):
"""Compute the non-linear term in angular acceleration.
The angular acceleration contains a quadratic term with respect to
the derivative of the rotation vector. This function computes that.
Parameters
----------
rotvecs : ndarray, shape (n, 3)
Set of rotation vectors.
rotvecs_dot: ndarray, shape (n, 3)
Set of rotation vector derivatives.
Returns
-------
ndarray, shape (n, 3)
"""
norm = np.linalg.norm(rotvecs, axis=1)
dp = np.sum(rotvecs * rotvecs_dot, axis=1)
cp = np.cross(rotvecs, rotvecs_dot)
ccp = np.cross(rotvecs, cp)
dccp = np.cross(rotvecs_dot, cp)
k1 = np.empty_like(norm)
k2 = np.empty_like(norm)
k3 = np.empty_like(norm)
mask = norm > 1e-4
nm = norm[mask]
k1[mask] = (-nm * np.sin(nm) - 2 * (np.cos(nm) - 1)) / nm ** 4
k2[mask] = (-2 * nm + 3 * np.sin(nm) - nm * np.cos(nm)) / nm ** 5
k3[mask] = (nm - np.sin(nm)) / nm ** 3
mask = ~mask
nm = norm[mask]
k1[mask] = 1/12 - nm ** 2 / 180
k2[mask] = -1/60 + nm ** 2 / 12604
k3[mask] = 1/6 - nm ** 2 / 120
dp = dp[:, None]
k1 = k1[:, None]
k2 = k2[:, None]
k3 = k3[:, None]
return dp * (k1 * cp + k2 * ccp) + k3 * dccp
def _compute_angular_rate(rotvecs, rotvecs_dot):
"""Compute angular rates given rotation vectors and its derivatives.
Parameters
----------
rotvecs : ndarray, shape (n, 3)
Set of rotation vectors.
rotvecs_dot : ndarray, shape (n, 3)
Set of rotation vector derivatives.
Returns
-------
ndarray, shape (n, 3)
"""
return _matrix_vector_product_of_stacks(
_rotvec_dot_to_angular_rate_matrix(rotvecs), rotvecs_dot)
def _compute_angular_acceleration(rotvecs, rotvecs_dot, rotvecs_dot_dot):
"""Compute angular acceleration given rotation vector and its derivatives.
Parameters
----------
rotvecs : ndarray, shape (n, 3)
Set of rotation vectors.
rotvecs_dot : ndarray, shape (n, 3)
Set of rotation vector derivatives.
rotvecs_dot_dot : ndarray, shape (n, 3)
Set of rotation vector second derivatives.
Returns
-------
ndarray, shape (n, 3)
"""
return (_compute_angular_rate(rotvecs, rotvecs_dot_dot) +
_angular_acceleration_nonlinear_term(rotvecs, rotvecs_dot))
def _create_block_3_diagonal_matrix(A, B, d):
"""Create a 3-diagonal block matrix as banded.
The matrix has the following structure:
DB...
ADB..
.ADB.
..ADB
...AD
The blocks A, B and D are 3-by-3 matrices. The D matrices has the form
d * I.
Parameters
----------
A : ndarray, shape (n, 3, 3)
Stack of A blocks.
B : ndarray, shape (n, 3, 3)
Stack of B blocks.
d : ndarray, shape (n + 1,)
Values for diagonal blocks.
Returns
-------
ndarray, shape (11, 3 * (n + 1))
Matrix in the banded form as used by `scipy.linalg.solve_banded`.
"""
ind = np.arange(3)
ind_blocks = np.arange(len(A))
A_i = np.empty_like(A, dtype=int)
A_i[:] = ind[:, None]
A_i += 3 * (1 + ind_blocks[:, None, None])
A_j = np.empty_like(A, dtype=int)
A_j[:] = ind
A_j += 3 * ind_blocks[:, None, None]
B_i = np.empty_like(B, dtype=int)
B_i[:] = ind[:, None]
B_i += 3 * ind_blocks[:, None, None]
B_j = np.empty_like(B, dtype=int)
B_j[:] = ind
B_j += 3 * (1 + ind_blocks[:, None, None])
diag_i = diag_j = np.arange(3 * len(d))
i = np.hstack((A_i.ravel(), B_i.ravel(), diag_i))
j = np.hstack((A_j.ravel(), B_j.ravel(), diag_j))
values = np.hstack((A.ravel(), B.ravel(), np.repeat(d, 3)))
u = 5
l = 5
result = np.zeros((u + l + 1, 3 * len(d)))
result[u + i - j, j] = values
return result
class RotationSpline:
"""Interpolate rotations with continuous angular rate and acceleration.
The rotation vectors between each consecutive orientation are cubic
functions of time and it is guaranteed that angular rate and acceleration
are continuous. Such interpolation are analogous to cubic spline
interpolation.
Refer to [1]_ for math and implementation details.
Parameters
----------
times : array_like, shape (N,)
Times of the known rotations. At least 2 times must be specified.
rotations : `Rotation` instance
Rotations to perform the interpolation between. Must contain N
rotations.
Methods
-------
__call__
References
----------
.. [1] `Smooth Attitude Interpolation
`_
Examples
--------
>>> from scipy.spatial.transform import Rotation, RotationSpline
Define the sequence of times and rotations from the Euler angles:
>>> times = [0, 10, 20, 40]
>>> angles = [[-10, 20, 30], [0, 15, 40], [-30, 45, 30], [20, 45, 90]]
>>> rotations = Rotation.from_euler('XYZ', angles, degrees=True)
Create the interpolator object:
>>> spline = RotationSpline(times, rotations)
Interpolate the Euler angles, angular rate and acceleration:
>>> angular_rate = np.rad2deg(spline(times, 1))
>>> angular_acceleration = np.rad2deg(spline(times, 2))
>>> times_plot = np.linspace(times[0], times[-1], 100)
>>> angles_plot = spline(times_plot).as_euler('XYZ', degrees=True)
>>> angular_rate_plot = np.rad2deg(spline(times_plot, 1))
>>> angular_acceleration_plot = np.rad2deg(spline(times_plot, 2))
On this plot you see that Euler angles are continuous and smooth:
>>> import matplotlib.pyplot as plt
>>> plt.plot(times_plot, angles_plot)
>>> plt.plot(times, angles, 'x')
>>> plt.title("Euler angles")
>>> plt.show()
The angular rate is also smooth:
>>> plt.plot(times_plot, angular_rate_plot)
>>> plt.plot(times, angular_rate, 'x')
>>> plt.title("Angular rate")
>>> plt.show()
The angular acceleration is continuous, but not smooth. Also note that
the angular acceleration is not a piecewise-linear function, because
it is different from the second derivative of the rotation vector (which
is a piecewise-linear function as in the cubic spline).
>>> plt.plot(times_plot, angular_acceleration_plot)
>>> plt.plot(times, angular_acceleration, 'x')
>>> plt.title("Angular acceleration")
>>> plt.show()
"""
# Parameters for the solver for angular rate.
MAX_ITER = 10
TOL = 1e-9
def _solve_for_angular_rates(self, dt, angular_rates, rotvecs):
angular_rate_first = angular_rates[0].copy()
A = _angular_rate_to_rotvec_dot_matrix(rotvecs)
A_inv = _rotvec_dot_to_angular_rate_matrix(rotvecs)
M = _create_block_3_diagonal_matrix(
2 * A_inv[1:-1] / dt[1:-1, None, None],
2 * A[1:-1] / dt[1:-1, None, None],
4 * (1 / dt[:-1] + 1 / dt[1:]))
b0 = 6 * (rotvecs[:-1] * dt[:-1, None] ** -2 +
rotvecs[1:] * dt[1:, None] ** -2)
b0[0] -= 2 / dt[0] * A_inv[0].dot(angular_rate_first)
b0[-1] -= 2 / dt[-1] * A[-1].dot(angular_rates[-1])
for iteration in range(self.MAX_ITER):
rotvecs_dot = _matrix_vector_product_of_stacks(A, angular_rates)
delta_beta = _angular_acceleration_nonlinear_term(
rotvecs[:-1], rotvecs_dot[:-1])
b = b0 - delta_beta
angular_rates_new = solve_banded((5, 5), M, b.ravel())
angular_rates_new = angular_rates_new.reshape((-1, 3))
delta = np.abs(angular_rates_new - angular_rates[:-1])
angular_rates[:-1] = angular_rates_new
if np.all(delta < self.TOL * (1 + np.abs(angular_rates_new))):
break
rotvecs_dot = _matrix_vector_product_of_stacks(A, angular_rates)
angular_rates = np.vstack((angular_rate_first, angular_rates[:-1]))
return angular_rates, rotvecs_dot
def __init__(self, times, rotations):
from scipy.interpolate import PPoly
if rotations.single:
raise ValueError("`rotations` must be a sequence of rotations.")
if len(rotations) == 1:
raise ValueError("`rotations` must contain at least 2 rotations.")
times = np.asarray(times, dtype=float)
if times.ndim != 1:
raise ValueError("`times` must be 1-dimensional.")
if len(times) != len(rotations):
raise ValueError("Expected number of rotations to be equal to "
"number of timestamps given, got {} rotations "
"and {} timestamps."
.format(len(rotations), len(times)))
dt = np.diff(times)
if np.any(dt <= 0):
raise ValueError("Values in `times` must be in a strictly "
"increasing order.")
rotvecs = (rotations[:-1].inv() * rotations[1:]).as_rotvec()
angular_rates = rotvecs / dt[:, None]
if len(rotations) == 2:
rotvecs_dot = angular_rates
else:
angular_rates, rotvecs_dot = self._solve_for_angular_rates(
dt, angular_rates, rotvecs)
dt = dt[:, None]
coeff = np.empty((4, len(times) - 1, 3))
coeff[0] = (-2 * rotvecs + dt * angular_rates
+ dt * rotvecs_dot) / dt ** 3
coeff[1] = (3 * rotvecs - 2 * dt * angular_rates
- dt * rotvecs_dot) / dt ** 2
coeff[2] = angular_rates
coeff[3] = 0
self.times = times
self.rotations = rotations
self.interpolator = PPoly(coeff, times)
def __call__(self, times, order=0):
"""Compute interpolated values.
Parameters
----------
times : float or array_like
Times of interest.
order : {0, 1, 2}, optional
Order of differentiation:
* 0 (default) : return Rotation
* 1 : return the angular rate in rad/sec
* 2 : return the angular acceleration in rad/sec/sec
Returns
-------
Interpolated Rotation, angular rate or acceleration.
"""
if order not in [0, 1, 2]:
raise ValueError("`order` must be 0, 1 or 2.")
times = np.asarray(times, dtype=float)
if times.ndim > 1:
raise ValueError("`times` must be at most 1-dimensional.")
singe_time = times.ndim == 0
times = np.atleast_1d(times)
rotvecs = self.interpolator(times)
if order == 0:
index = np.searchsorted(self.times, times, side='right')
index -= 1
index[index < 0] = 0
n_segments = len(self.times) - 1
index[index > n_segments - 1] = n_segments - 1
result = self.rotations[index] * Rotation.from_rotvec(rotvecs)
elif order == 1:
rotvecs_dot = self.interpolator(times, 1)
result = _compute_angular_rate(rotvecs, rotvecs_dot)
elif order == 2:
rotvecs_dot = self.interpolator(times, 1)
rotvecs_dot_dot = self.interpolator(times, 2)
result = _compute_angular_acceleration(rotvecs, rotvecs_dot,
rotvecs_dot_dot)
else:
assert False
if singe_time:
result = result[0]
return result