深入理解Golang Channel
Golang使用Groutine和channels实现了CSP(Communicating Sequential Processes)模型,channles在goroutine的通信和同步中承担着重要的角色。在GopherCon 2017中,Golang专家Kavya深入介绍了 Go Channels 的内部机制,以及运行时调度器和内存管理系统是如何支持Channel的,本文根据Kavya的ppt学习和分析一下go channels的原理,希望能够对以后正确高效使用golang的并发带来一些启发。
以一个简单的channel应用开始,使用goroutine和channel实现一个任务队列,并行处理多个任务。
func main(){
//带缓冲的channel
ch := make(chan Task, 3)
//启动固定数量的worker
for i := 0; i< numWorkers; i++ {
go worker(ch)
}
//发送任务给worker
hellaTasks := getTaks()
for _, task := range hellaTasks {
ch <- task
}
...
}
func worker(ch chan Task){
for {
//接受任务
task := <- ch
process(task)
}
}
从上面的代码可以看出,使用golang的goroutine和channel可以很容易的实现一个生产者-消费者模式的任务队列,相比Java, c++简洁了很多。channel可以天然的实现了下面四个特性:
- goroutine安全
- 在不同的goroutine之间存储和传输值 - 提供FIFO语义(buffered channel提供)
- 可以让goroutine block/unblock
那么channel是怎么实现这些特性的呢?下面我们看看当我们调用make来生成一个channel的时候都做了些什么。
make chan
上述任务队列的例子第三行,使用make创建了一个长度为3的带缓冲的channel,channel在底层是一个hchan结构体,位于src/runtime/chan.go里。其定义如下:
type hchan struct {
qcount uint // total data in the queue
dataqsiz uint // size of the circular queue
buf unsafe.Pointer // points to an array of dataqsiz elements
elemsize uint16
closed uint32
elemtype *_type // element type
sendx uint // send index
recvx uint // receive index
recvq waitq // list of recv waiters
sendq waitq // list of send waiters
// lock protects all fields in hchan, as well as several
// fields in sudogs blocked on this channel.
//
// Do not change another G's status while holding this lock
// (in particular, do not ready a G), as this can deadlock
// with stack shrinking.
lock mutex
}make函数在创建channel的时候会在该进程的heap区申请一块内存,创建一个hchan结构体,返回执行该内存的指针,所以获取的的ch变量本身就是一个指针,在函数之间传递的时候是同一个channel。
hchan结构体使用一个环形队列来保存groutine之间传递的数据(如果是缓存channel的话),使用两个list保存像该chan发送和从该chan接收数据的goroutine,还有一个mutex来保证操作这些结构的安全。
发送和接收
向channel发送和从channel接收数据主要涉及hchan里的四个成员变量,借用Kavya ppt里的图示,来分析发送和接收的过程。

还是以前面的任务队列为例:
//G1
func main(){
...
for _, task := range hellaTasks {
ch <- task //sender
}
...
}
//G2
func worker(ch chan Task){
for {
//接受任务
task := <- ch //recevier
process(task)
}
}
其中G1是发送者,G2是接收,因为ch是长度为3的带缓冲channel,初始的时候hchan结构体的buf为空,sendx和recvx都为0,当G1向ch里发送数据的时候,会首先对buf加锁,然后将要发送的数据copy到buf里,并增加sendx的值,最后释放buf的锁。然后G2消费的时候首先对buf加锁,然后将buf里的数据copy到task变量对应的内存里,增加recvx,最后释放锁。整个过程,G1和G2没有共享的内存,底层通过hchan结构体的buf,使用copy内存的方式进行通信,最后达到了共享内存的目的,这完全符合CSP的设计理念
Do not comminute by sharing memory;instead, share memory by communicating
一般情况下,G2的消费速度应该是慢于G1的,所以buf的数据会越来越多,这个时候G1再向ch里发送数据,这个时候G1就会阻塞,那么阻塞到底是发生了什么呢?
Goroutine Pause/Resume
goroutine是Golang实现的用户空间的轻量级的线程,有runtime调度器调度,与操作系统的thread有多对一的关系,相关的数据结构如下图:
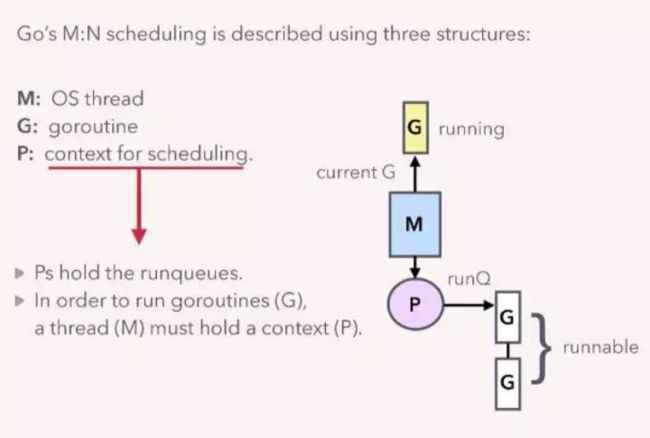
其中M是操作系统的线程,G是用户启动的goroutine,P是与调度相关的context,每个M都拥有一个P,P维护了一个能够运行的goutine队列,用于该线程执行。
当G1向buf已经满了的ch发送数据的时候,当runtine检测到对应的hchan的buf已经满了,会通知调度器,调度器会将G1的状态设置为waiting, 移除与线程M的联系,然后从P的runqueue中选择一个goroutine在线程M中执行,此时G1就是阻塞状态,但是不是操作系统的线程阻塞,所以这个时候只用消耗少量的资源。
那么G1设置为waiting状态后去哪了?怎们去resume呢?我们再回到hchan结构体,注意到hchan有个sendq的成员,其类型是waitq,查看源码如下:
type hchan struct {
...
recvq waitq // list of recv waiters
sendq waitq // list of send waiters
...
}
//
type waitq struct {
first *sudog
last *sudog
}
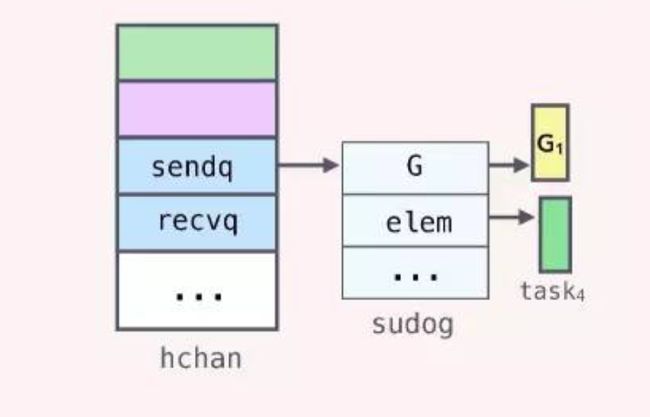
实际上,当G1变为waiting状态后,会创建一个代表自己的sudog的结构,然后放到sendq这个list中,sudog结构中保存了channel相关的变量的指针(如果该Goroutine是sender,那么保存的是待发送数据的变量的地址,如果是receiver则为接收数据的变量的地址,之所以是地址,前面我们提到在传输数据的时候使用的是copy的方式)
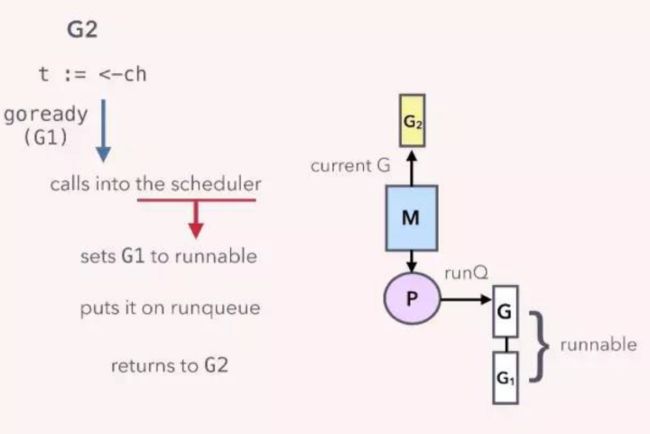
当G2从ch中接收一个数据时,会通知调度器,设置G1的状态为runnable,然后将加入P的runqueue里,等待线程执行.
wait empty channel
前面我们是假设G1先运行,如果G2先运行会怎么样呢?如果G2先运行,那么G2会从一个empty的channel里取数据,这个时候G2就会阻塞,和前面介绍的G1阻塞一样,G2也会创建一个sudog结构体,保存接收数据的变量的地址,但是该sudog结构体是放到了recvq列表里,当G1向ch发送数据的时候,runtime并没有对hchan结构体题的buf进行加锁,而是直接将G1里的发送到ch的数据copy到了G2 sudog里对应的elem指向的内存地址!

总结
Golang的一大特色就是其简单高效的天然并发机制,使用goroutine和channel实现了CSP模型。理解channel的底层运行机制对灵活运用golang开发并发程序有很大的帮助,看了Kavya的分享,然后结合golang runtime相关的源码(源码开源并且也是golang实现简直良心!),对channel的认识更加的深刻,当然还有一些地方存在一些疑问,比如goroutine的调度实现相关的,还是要潜心膜拜大神们的源码!
参考资料
- https://speakerdeck.com/kavya719/understanding-channels
- https://about.sourcegraph.com/go/understanding-channels-kavya-joshi
- https://github.com/golang/go/blob/master/src/runtime/chan.go
- https://github.com/golang/go/blob/master/src/runtime/runtime2.go