元宇宙之XR(02)VR概念解读 & 分类说明
1 基本概念 & 专业术语 总结
1.01 头显(Head Mounted Display,HMD)
头戴式显示器是为用户提供VR体验的硬件。HMD有不同的形式,VR头盔、VR眼镜等。通过头显看到的景象会让你从VR体验中获得快感。
1.02 头部追踪(Head Tracking)
通过传感器集可以追踪用户的头部运动,根据记录的数据移动放映的图像,使其可以与头部运动的位置相匹配。当你的头部向左、向右、向上或向下看时,你可以看到头显中这些方向的场景。
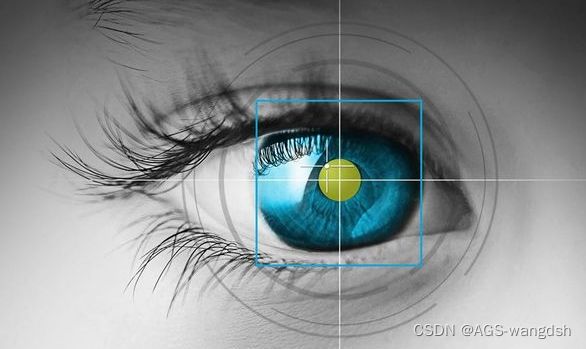
1.03 眼球追踪(Eye Tracking)
眼球追踪类似于头部追踪,但是图像的呈现取决于使用者眼睛所注视的方向。例如,人们可以在游戏中使用“眼神”完成一种镭射枪的瞄准。Oculus创始人帕尔默•拉奇就曾称之为“VR的心脏”。对于人眼位置的检测与追踪,能够针对当前所处的视角提供最佳3D效果,让VR头显呈现出更自然的图像、更小延迟,大大增加了可玩性。此外,透过眼球追踪来获知人眼的确实注视点,从而得到虚拟物体上视点位置的景深。这很可能是解决VR头盔眩晕病问题的关键核心技术。
1.04 刷新率(Refresh Rate)
如果你在看电视,亦或者在虚拟现实体验中,你会看到一系列图像。刷新率就是这些图像以怎样的速度更新。高刷新率会降低延迟,即会降低模拟晕动症的出现,同时还意味着玩家将获取更为灵敏的体验。当然你肯定想要达到60帧每秒以上的刷新率以获得最佳体验。
1.05 延迟(Latency)
如果你体验过VR,你可能会注意到当你转动你的头部时,你所看到的屏幕内容可能会跟不上,这就是延迟。这会带来不舒适的感觉,因为这一切在真实世界是完全不存在的。这种图像的延迟是常被用户用来抱怨某些VR体验,因各种原因没有达到标准,也是对VR技术的一个衡量标准。
1.06 模拟器晕动症(Simulator Sickness)
模拟晕动症是由大脑和身体所处理的信息不一致所引起的。人通过听觉、视觉、触觉来获得外界环境的信息。经过长期的进化,人类的各种感觉器官是高度协调合作的。人们在体验虚拟现实的过程中,想要做飞行或跳跃的动作,对于许多人,这是一个不好的想法。但是每个人的体质不同,并不是所有人都会产生晕动症。对于开发者来说这是一个极大的挑战——开发者需要弄清楚如何使人们移动而不会使用户产生模拟晕动症。
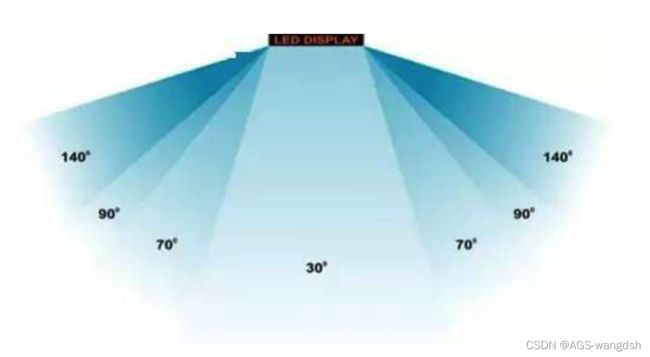
1.07 视场角(Field of View,FOV)
视场角是VR可视区域的度数。具有一个更高的视场尤为重要,因为它有助于用户在VR体验中拥有高度的沉浸感。人眼正常的视场角约为200°。视场角越大,人所体验到的沉浸感越强。
1.08 数据手套(Data Glove)
有时也被称为有线手套,其中塞满精密的传感器,当你玩VR游戏时,传感器会与电脑联通,双手运动和手势引导你穿越VR环境。
1.09 运动台(Motion Platform)
你站在运动台上面,它会根据VR世界中的情况,让你在现实中对应地动起来。就是把你甩来甩去。你可能会看起来很搞笑,但体验特别真实。你应该在电影院大厅见过这种东西。
1.10 VR社交(Social VR)
对于VR社交,facebook的CEO扎克伯格这样解释道:“很快我们将生活在一个世界里,不管你身在何处,都能够分享和体验整个场景,”扎克伯格表示,“想象一下,只要你愿意,你就能够在篝火面前坐下来,和朋友出去玩,或者在私人影院看电影。想象一下,只要你愿意,你可以在任何地方举行小组会议或者活动,这所有的场景很快都将成为现实。
1.11 宽高比(Aspect Ratio)
你的观看屏幕宽度和高度的比例。它会影响VR世界如何成像以及图像是否变得扭曲,最终的观感取决于合适的像素。
1.12 抖动(Judder)
抖动可以理解为颤抖或者摇晃。但是对于VR来说,Oculus的CTO Michael Abrash于2013当他还在Valve Software工作时写过一篇博客(链接)对这种抖动的定义是”在VR/AR头戴式设备上尤为显著的涂抹和脉冲的结合“。
1.13 触觉技术(Haptics)
这是另外一个并不是VR特有的名词。但是就VR而言,它表示触觉反馈。它的意思是,使用者能感觉到正在触摸一个东西,但是那个东西并不真实存在。今年六月,Oculus发布了一款触控操作设备-Half Moon原型机,触控技术正是这款设备的主要特点之一。
1.14 模拟器晕动症(Simulator Sickness)
模拟晕动症是由大脑和身体所处理的信息不一致所引起的。人通过听觉、视觉、触觉来获得外界环境的信息。经过长期的进化,人类的各种感觉器官是高度协调合作的,而人们在体验虚拟现实的过程中,想要做飞行或跳跃的动作,对于许多人,这并不好。但是每个人的体质不同,并不是所有人都会产生晕动症。对于开发者来说这是一个极大的挑战,因为开发者需要弄清楚如何使人们移动而不会使用户产生模拟晕动症。
1.15 元宇宙(Metaverse)
对于这个词而言,现阶段并没有严格意义上的定义。大体上说,这是虚拟现实的哲学根基。Forbes将其定义为一种“总体虚拟现实“。然而对于虚拟空间并没有大量的讨论,无论是如何应用它还是如何定义它。不过我们能从尼尔·史蒂芬森1992年的科幻小说《雪崩》(Snow Crash)中找到他关于虚拟空间的设想。
1.16 自由度(3Dof & 6Dof,dof:degree of freedom,自由度)
VR中,3dof是指 3个转动角度的自由度。而 6dof 是指,除了3个转动角度外,再加上 位置相关的 3个自由度(上下、左右、前后)。当我们说 3dof VR眼镜时,是指该VR眼镜可以检测到头部的 3个方向的转动,但是不能检测到头部的前后左右上下的移动。而 6dof 眼镜,则是可以全面的检测到 头部的 空间和角度信息。

1.17 VR追踪技术解读
@1 Outside-In(外向内追踪技术):通过外部基站对设备进行跟踪。
- 缺点:覆盖范围有限,一般是两个基站为对角线的矩形范围,体验者只能在这个范围内移动。
- 优点:精度高,在有限的覆盖范围内,只要不做出难度系数很高的姿势,几乎没有跟踪死角。
@2 Inside-Out(内向外追踪技术):本质上是通过摄像头结合计算机视觉技术进行的位置追踪,被广泛应用在双6DoF体验的移动VR方案中(Oculus Quest系列、Pico Neo系列等),以及部分PC VR硬件上(Windows MR系列、HTC VIVE等)。
- 缺点:跟踪精度相对较低,有跟踪死角,比如在开发过程中无法实现从背后拔剑的交互等等(当然通过人工智能机器学习什么的来判断姿态的另说),因为手柄控制器超出前置摄像头的"观测"范围。另外就是受环境光照影响较大,极端的例子是采用这种跟踪方案的设备几乎不能在全黑、全白(或者几乎没有环境颜色细节变化)的空间中进行体验,你也不能趁家人都睡着了在不开灯的房间里体验一把白天不好意思体验的VR应用。
- 优点:不受区域范围影响,理论上来说,只要虚拟场景设计的足够大,如神庙逃亡这样的环境,可以在现实世界中走到无限远,也就是大家希望体验到的那种移动VR。另外就是,我们相信这种解决方案的缺点,未来可以通过技术手段得到改善,从而带来更好的移动VR体验,而Outside-In方案几乎没有希望。
2 VR设备分类
根据VR眼镜具体实现方式,我们一般把它们分成三大类:盒子方案、PC方案、一体机方案。
2.1 盒子方案(cardboard)
属于体验级VR眼镜产品,基本都是 3dof VR,核心的处理都在手机上完成,盒子的核心主要是透镜,这类眼镜的成本非常低,体验也较差。

一些高端的盒子方案 还会佩戴3dof 手柄控制器,使得操作更加便利。 如果要在 手机盒子 上实现 6dof VR,则需要增加一些外设,比如 nolo 的 6dof 交互套件:

2.2 PC端方案( PCVR,Tethered HMD)
相对于盒子方案,VR头戴显示器 则属于VR眼镜里的高端存在。为了达到极优秀的显示效果,它们一般都需要连接PC(Sony的PSVR是连接PS4),使用PC的CPU和显卡来进行运算。头戴显示器,制作成本和总价很高,同时体验最好。目前VR 6dof检测技术主要有三类:
@1 外置激光定位:通过外置的激光发射器对设备进行定位,特点是,速度快,位置准,缺点是 成本高。HTC vive 便是用了此种方式( Lighthouse 技术,由 Valve 公司研制 )。
@2 外置图像处理定位:通过外部放置摄像头,拍摄 头盔/手柄 上的光点,来进行定位,Oculus(红外线) 和 PSVR (可见光)都是使用这种方式。
@3 内置图像处理定位( InsideOut 定位):通过头盔上的摄像头拍摄画面的变化,来估计头盔运动。微软MR眼镜使用的是这种方式。它的优势是不需要额外架设设备。但是,定位精度上,比激光定位要差一些。
3 一体机方案( Standalone HMD, All in one HMD)
一体机 使用移动芯片(如高通骁龙XR系列 )来进行图像定位计算。脱离了 PC/PS4 等外部设备的连线束缚,即开即用,非常方便。体验中等,价格也中等。此类设备一般采用inside-out方案来做6Dof的空间定位。 目前像pico neo VR设备都是 头部 6dof 和 手柄 6dof 的一体机。