Jetbotmini中的PID驱动算法控制与代码实现
PID算法在工业领域应用极为广泛,汽车、飞机、导弹、设备上的温度控制等等都有它的身影,其中的PID三个字母分别是Proportional比例、Integral积分、Derivative微分的首字母,PID控制算法是结合比例、积分和微分三种环节于一体的控制算法。PID控制的实质就是根据输入的偏差值,按照比例、积分、微分的函数关系进行运算,运算结果用以控制输出,通过这三个算法的组合可有效地纠正被控制对象的偏差,从而使其达到一个稳定的状态。
更多详情可以查看百度百科的解释:PID算法
举个简单通俗的例子,比如说自动驾驶,保持30码的速度,如果说按照常见的思维,低于30码就踩油门加速,高于30码就踩刹车减速,那车子就会很不稳定了,时快时慢,坐起来不舒服之外,安全也是个问题,所以这个时候就用到PID控制了,就是说,低于30码没多少的情况,我就轻轻加点油,高于30码就轻轻带点刹车,这样车子显得很平稳。当然这个例子看起来只说明了P这个按比例的调节,显然也是不会有很好的效果,还需要用到微分和积分,意思就是让它们微调,这样可以做到一个很好的稳定输出。
1、PID公式与说明
我们先来熟悉下PID的公式,如下:
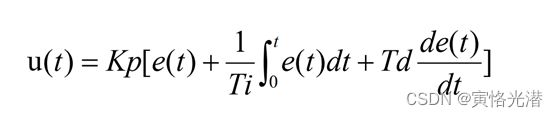
Kp:比例增益,Kp与比例度成倒数关系
Tt:积分时间常数
TD:微分时间常数
u(t):PID控制器的输出信号
e(t):给定值r(t)与测量值之差,或说两次误差的差值
PID控制器如图:
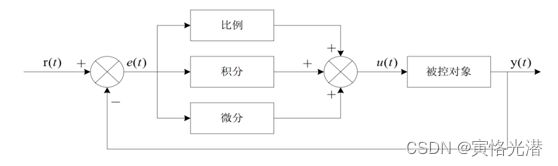
图中可以看到经过三个算法的相加,得到一个稳定的输出,然后应用到被控制的对象。
PID三个算法(也可以看成是调三个参数)的说明如下:
比例(Proportional):在模拟 PID 控制器中,比例环节的作用是对偏差瞬间作出反应。偏差一旦产生,控制器就立即产生控制作用,使控制量向减少偏差的方向变化。控制作用的强弱取决于比例系数 ,比例系数越大,控制作用越强,则过渡过程越快,控制过程的静态偏差也就越小;但是越大,也越容易产生振荡,破坏系统的稳定性。故而,比例系数的选择必须恰当,才能过渡时间少,静差小而又稳定的效果
积分(Integral):从积分部分的数学表达式可以知道,只要存在偏差,则它的控制作用就不断的增加;只有在偏差时,它的积分才能是一个常数,控制作用才是一个不会增加的常数。可见,积分部分可以消除系统的偏差。e(t)=0积分环节的调节作用虽然会消除静态误差,但也会降低系统的响应速度,增加系统的超调量。积分常数越大,积分的积累作用越弱,这时系统在过渡时不会产生振荡;但是增大积分常数会减慢静态误差的消除过程,消除偏差所需的时间也较长,但可以减少超调量,提高系统的稳定性。当Ti 较小时,则积分的作用较强,这时系统过渡时间中有可能产生振荡,不过消除偏差所需的时间较短。所以必须根据实际控制的具体要求来确定Ti。
微分(Derivative):实际的控制系统除了希望消除静态误差外,还要求加快调节过程。在偏差出现的瞬间,或在偏差变化的瞬间,不但要对偏差量做出立即响应(比例环节的作用),而且要根据偏差的变化趋势预先给出适当的纠正。为了实现这一作用,可在PI控制器的基础上加入微分环节,形成PID控制器。微分环节的作用是阻止偏差的变化。它是根据偏差的变化趋势(变化速度)进行控制。偏差变化的越快,微分控制器的输出就越大,并能在偏差值变大之前进行修正。微分作用的引入,将有助于减小超调量,克服振荡,使系统趋于稳定,特别对高阶系统非常有利,它加快了系统的跟踪速度。但微分的作用对输入信号的噪声很敏感,对那些噪声较大的系统一般不用微分,或在微分起作用之前先对输入信号进行滤波。微分部分的作用由微分时间常数Td决定。Td越大时,则它抑制偏差变化的作用越强;Td越小时,则它反抗偏差变化的作用越弱。微分部分显然对系统稳定有很大的作用。适当地选择微分常数Td,可以使微分作用达到最优。
数字式 PID 控制算法可以分为位置式PID和增量式PID控制算法。那么我们在决定选择使用哪个PID算法之前我们应该先要了解它们各自的原理:
2、位置式PID算法

e(k): 用户设定的值(目标值)- 控制对象的当前的状态值
比例Kp:e(k)
积分 :∑e(i),误差的累加
:∑e(i),误差的累加
微分 :e(k) - e(k-1),这次误差-上次误差
:e(k) - e(k-1),这次误差-上次误差
位置式PID的含义就是当前系统的实际位置,与你想要达到的预期位置的偏差,进行PID控制。
因为有误差积分∑e(i)的一直累加,也就是当前的输出u(k)与过去的所有状态都有关系,用到了误差的累加值;输出的u(k)对应的是执行机构的实际位置,一旦控制输出出错(控制对象的当前状态值出现问题 ),u(k)的大幅变化会引起系统的大幅变化并且位置式PID在积分项达到饱和时,误差仍然会在积分作用下继续累积,一旦误差开始反向变化,系统需要一定时间从饱和区退出,所以在u(k)达到最大和最小时,要停止积分作用,并且要有积分限幅和输出限幅,所以在使用位置式PID时,一般我们直接使用PD控制,而位置式 PID 适用于执行机构不带积分部件的对象,如舵机,平衡小车的直立和温控系统的控制
3、增量式PID算法

比例KP:e(k)-e(k-1),这次误差-上次误差
积分KI:e(i),误差
微分KD:e(k) - 2e(k-1)+e(k-2),这次误差-2*上次误差+上上次误差
增量式PID根据公式可以很好地看出,只要使用前后三次测量值的偏差,即可由公式求出控制增量而得出的控制量▲u(k)对应的是近几次位置误差的增量,而不是对应与实际位置的偏差,没有误差累加,也就是说,增量式PID中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果,并且在系统发生问题时,增量式不会严重影响系统的工作
4、位置式PID与增量式PID的区别和优缺点
4.1、两者区别
1、增量式算法不需要做累加,控制增量的确定仅与最近几次偏差采样值有关,计算误差对控制量计算的影响较小。而位置式算法要用到过去偏差的累加值,容易产生较大的累加误差。
2.、增量式算法得出的是控制量的增量,例如在阀门控制中,只输出阀门开度的变化部分,误差动作影响小,必要时还可通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作。而位置式的输出直接对应对象的输出,因此对系统影响较大。
3.、增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等。而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。
4、在进行PID控制时,位置式PID需要有积分限幅和输出限幅,而增量式PID只需输出限幅
4.2、位置式PID优缺点
优点:
①位置式PID是一种非递推式算法,可直接控制执行机构(如平衡小车),u(k)的值和执行机构的实际位置(如小车当前角度)是一一对应的,因此在执行机构不带积分部件的对象中可以很好的应用。
缺点:
①每次输出均与过去的状态有关,计算时要对e(k)进行累加,运算工作量大。
4.3、增量式PID优缺点
优点:
①误动作时影响小,必要时可使用逻辑判断的方法去掉出错数据。
②手动/自动切换时冲击小,便于实现无扰动切换。当计算机故障时,仍能保持原值。
③算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关。
缺点:
①积分截断效应大,有稳态误差。
②溢出的影响大,有的被控对象用增量式则不太好。
下面我们通过代码并可视化,大家可能就更清楚这个算法的妙处了,代码是通过ChatGPT4的生成,然后增加可视化的代码,让大家直观感受下。
5、位置式PID代码
import numpy as np
import matplotlib.pyplot as plt
class PID:
def __init__(self, Kp, Ki, Kd):
self.Kp = Kp # 比例系数
self.Ki = Ki # 积分系数
self.Kd = Kd #微分系数
self.last_error = 0 # 上一次的误差
self.integral = 0 # 误差积分值
def update(self, setpoint, position, dt):
'''setpoint:目标值、position:当前位置、dt:时间步长'''
self.setpoint = setpoint
self.position = position
self.dt = dt
error = self.setpoint - self.position # 当前误差
self.integral += error * dt # 积分项
derivative = (error - self.last_error) / dt #微分项
output = self.Kp * error + self.Ki * self.integral + self.Kd * derivative
self.last_error = error
self.position = output
return self.position
def fit_and_plot(self, count = 100):
counts = np.arange(count)
outputs = []
for i in counts:
outputs.append(self.update(self.setpoint,self.position,self.dt))
print('Count %3d: output: %f' % (i, outputs[-1]))
print('Done')
plt.figure()
plt.axhline(self.setpoint, c='red',ls='--')
plt.plot(counts, np.array(outputs), 'g.')
plt.ylim(min(outputs) - 0.1 * min(outputs), max(outputs) + 0.1 * max(outputs))
plt.plot(outputs)
plt.show()
pid = PID(0.2, 0.1, 0.01)
setpoint = 10.0
position = -5.0
dt = 0.5
pid.update(setpoint, position, dt)
pid.fit_and_plot(200)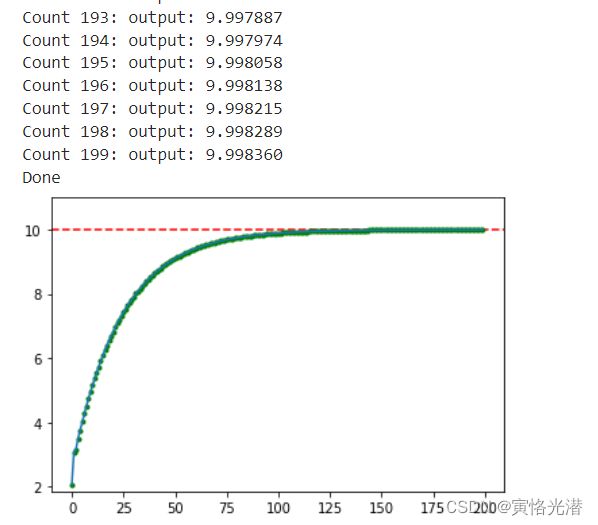
6、增量式PID代码
import numpy as np
import matplotlib.pyplot as plt
class PID(object):
def __init__(self, setpoint, position, dt, Kp, Ki, Kd) -> None:
self.dt = dt # 时间步长
self.Kp = Kp # 比例系数
self.Ki = Ki # 积分系数
self.Kd = Kd # 微分系数
self.setpoint = setpoint
self.position = position
self._pre_error = 0 # t-1 时刻误差值
self._pre_pre_error = 0 # t-2 时刻误差值
def update(self):
error = self.setpoint - self.position
p_change = self.Kp * (error - self._pre_error)
i_change = self.Ki * error
d_change = self.Kd * (error - 2 * self._pre_error + self._pre_pre_error)
delta_output = p_change + i_change + d_change # 本次增量
self.position += delta_output # 计算当前位置
self._pre_pre_error = self._pre_error
self._pre_error = error
return self.position
def fit_and_plot(self, count=100):
counts = np.arange(count)
outputs=[]
for i in counts:
outputs.append(self.update())
print('Count %3d: output: %f' % (i, outputs[-1]))
print('Done')
plt.figure()
plt.axhline(self.setpoint, c='red',ls='-.',lw=2) # 水平线,其中垂直线就是axvline
plt.plot(counts, np.array(outputs), 'g.')
plt.ylim(min(outputs) - 0.1 * min(outputs),max(outputs) + 0.1 * max(outputs))
plt.plot(outputs)
plt.show()
pid = PID(100, -80, 0.5, 0.2, 0.1, 0.001)
pid.fit_and_plot(150)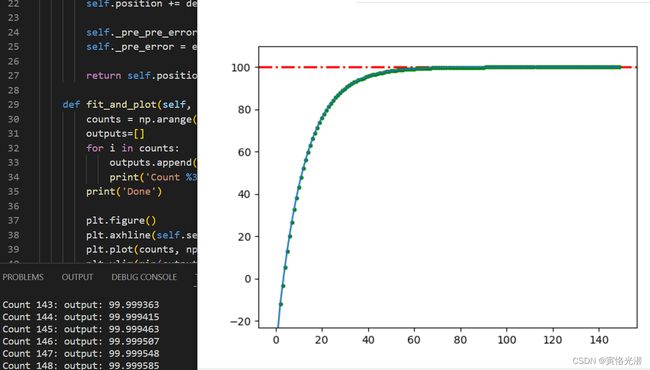
7、无人车中使用PID驱动
我们来看下无人车里面的驱动文件是怎么写的,PID.py源码如下:
'''
@Copyright (C): 2010-2019, Shenzhen Yahboom Tech
@Author: Malloy.Yuan
@Date: 2019-07-30 20:34:09
@LastEditors: Malloy.Yuan
@LastEditTime: 2019-08-08 16:10:46
'''
# PID控制一阶惯性系统测试程序
# PPID control first-order inertial system test program
#*****************************************************************#
# 增量式PID系统 #
# Incremental PID system #
#*****************************************************************#
class IncrementalPID:
def __init__(self, P, I, D):
self.Kp = P
self.Ki = I
self.Kd = D
self.PIDOutput = 0.0 #PID控制器输出
#PID controller output
self.SystemOutput = 0.0 #系统输出值
#System output value
self.LastSystemOutput = 0.0 #上次系统输出值
#Last system output value
self.Error = 0.0 #输出值与输入值的偏差
#Deviation between output value and input value
self.LastError = 0.0
self.LastLastError = 0.0
#设置PID控制器参数
#Set PID controller parameters
def SetStepSignal(self,StepSignal):
self.Error = StepSignal - self.SystemOutput
IncrementValue = self.Kp * (self.Error - self.LastError) +\
self.Ki * self.Error +\
self.Kd * (self.Error - 2 * self.LastError + self.LastLastError)
self.PIDOutput += IncrementValue
self.LastLastError = self.LastError
self.LastError = self.Error
#设置一阶惯性环节系统 其中InertiaTime为惯性时间常数
#Set the first-order inertial link system, where inertiatime is the inertial time constant
def SetInertiaTime(self,InertiaTime,SampleTime):
self.SystemOutput = (InertiaTime * self.LastSystemOutput + \
SampleTime * self.PIDOutput) / (SampleTime + InertiaTime)
self.LastSystemOutput = self.SystemOutput
# *****************************************************************#
# 位置式PID系统 #
# Position PID system #
# *****************************************************************#
class PositionalPID:
def __init__(self, P, I, D):
self.Kp = P
self.Ki = I
self.Kd = D
self.SystemOutput = 0.0
self.ResultValueBack = 0.0
self.PidOutput = 0.0
self.PIDErrADD = 0.0
self.ErrBack = 0.0
#设置PID控制器参数
#Set PID controller parameters
def SetStepSignal(self,StepSignal):
Err = StepSignal - self.SystemOutput
KpWork = self.Kp * Err
KiWork = self.Ki * self.PIDErrADD
KdWork = self.Kd * (Err - self.ErrBack)
self.PidOutput = KpWork + KiWork + KdWork
self.PIDErrADD += Err
self.ErrBack = Err
#设置一阶惯性环节系统 其中InertiaTime为惯性时间常数
#Set the first-order inertial link system, where inertiatime is the inertial time constant
def SetInertiaTime(self, InertiaTime,SampleTime):
self.SystemOutput = (InertiaTime * self.ResultValueBack + \
SampleTime * self.PidOutput) / (SampleTime + InertiaTime)
self.ResultValueBack = self.SystemOutput#导入模块PID.py
import PID
#创建控制实例
follow_speed_pid = PID.PositionalPID(1.5, 0, 0.05)
turn_gain_pid = PID.PositionalPID(0.15, 0, 0.05)然后对PID控制器配置出口(original value + xservo_pid.SystemOutput)、入口值(Now_value),设置惯性常数(InertiaTime),采样时间常数(SampleTime),初始值(original_value)。
惯性时间常数(InertiaTime):简单来说就是克服惯性所需要花费的时间。
采样时间常数(SampleTime):表示PID控制器上一次输入数据与邻近一次输入数据的间隔时间,大致等于进入PID控制器的主函数的循环一次所花费的时间。
follow_speed_pid.SystemOutput = Now_value
follow_speed_pid.SetStepSignal(Target_value)
follow_speed_pid.SetInertiaTime(InertiaTime, SampleTime)
target_valuex = int(original_value + follow_speed_pid.SystemOutput)通过上面的步骤,基本的PID控制器就完成了
8、PID控制器调参
这个跟前面深度学习中的超参数等类似,要想得到一组合适的参数也需要进行调试,在PID中调参非常烦杂,下面是一些经验调参步骤:
1、确定比例系数Kp
确定比例系数Kp时,首先去掉PID的积分项和微分项,可以令Ti=0、Td=0,使之成为纯比例调节。输入设定为系统允许输出最大值的60%~70%,比例系数Kp由0开始逐渐增大,直至系统出现振荡;再反过来,从此时的比例系数Kp逐渐减小,直至系统振荡消失。记录此时的比例系数Kp,设定PID的比例系数Kp为当前值的60%~70%。
2、确定积分时间常数Ti
比例系数Kp确定之后,设定一个较大的积分时间常数Ti,然后逐渐减小Ti,直至系统出现振荡,然后再反过来,逐渐增大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。
3、确定微分时间常数Td
微分时间常数Td一般不用设定,为0即可,此时PID调节转换为PI调节。如果需要设定,则与确定Kp的方法相同,取不振荡时其值的30%。
4、系统空载、带载联调
对PID参数进行微调,直到满足性能要求。
网上流传着调试PID的口诀,如下:
参数整定找最佳, 从小到大顺序查。
先是比例后积分, 最后再把微分加。
曲线振荡很频繁, 比例度盘要放大。
曲线漂浮绕大弯, 比例度盘往小扳。
曲线偏离回复慢, 积分时间往下降。
曲线波动周期长, 积分时间再加长。
曲线振荡频率快, 先把微分降下来。
动差大来波动慢, 微分时间应加长。
理想曲线两个波, 前高后低四比一。
一看二调多分析, 调节质量不会低。
PID是比例(P)、积分(I)、微分(D)控制算法,并不是必须同时具备这三种算法,也可以是PD,PI,甚至只有P算法控制。