- 合成孔径雷达干涉测量InSAR技术流程(星载/地基系统+DEM重建+DInSAR形变监测+时序分析)等
WangYan2022
遥感合成孔径雷达干涉测量InSAR形变信息提取地形三维重建
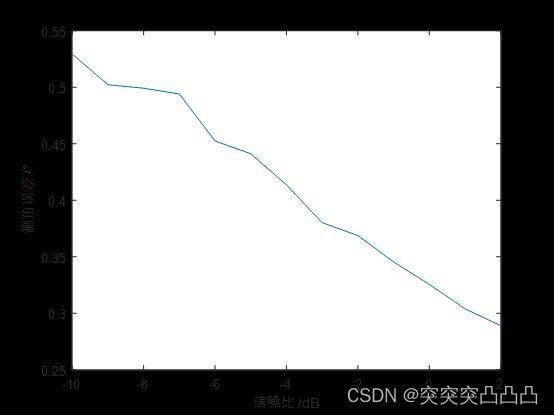
合成孔径雷达干涉测量(InterferometricSyntheticApertureRadar,InSAR)技术作为一种新兴的主动式微波遥感技术,凭借其可以穿过大气层,全天时、全天候获取监测目标的形变信息等特性,已在地表形变监测、DEM生成、滑坡、火山活动、冰川运动、人工建筑物形变信息提取等多种领域展开了成功应用。通过典型案例,熟练掌握InSAR数据处理(包括InSAR高程测量、DInSAR形变
- VS2017中英文大小写转换的快捷键
雪域迷影
由于经常使用VS2017开发C++程序,有时候需要将英文小写转换成大写,或者将大写转换成小写的,最近发现又快捷键,非常方便,如下:大写改成小写:Ctrl+U小写改成大写:Ctrl+Shift+U记得要选中要修改的一段英文。
- 时序数据库在数据库领域的行业应用
数据库管理艺术
数据库时序数据库ai
时序数据库在数据库领域的行业应用关键词:时序数据库、数据库领域、行业应用、时间序列数据、实时分析摘要:本文深入探讨了时序数据库在数据库领域的行业应用。首先介绍了时序数据库的背景知识,包括其目的、适用读者、文档结构和相关术语。接着阐述了时序数据库的核心概念、架构和工作原理,通过Python代码详细讲解了核心算法。还介绍了相关的数学模型和公式,并举例说明。在项目实战部分,给出了开发环境搭建、源代码实现
- macOS 上安装 Kubernetes(k8s)
老兵发新帖
macoskubernetes容器
在macOS上安装Kubernetes(k8s)主要有三种主流方案,以下根据安装复杂度、资源占用和适用场景分类说明,并附详细步骤:⚙️一、推荐方案:Minikube(单节点本地集群)适用场景:学习、开发测试、资源有限(需2-4GB内存)。安装步骤:安装依赖工具安装DockerDesktop(推荐)或VirtualBox:brewinstall--caskdocker或brewinstallvirt
- 基于STM32的智能窗帘控制系统设计与实现
基于STM32的智能窗帘控制系统设计与实现引言随着物联网(IoT)技术的发展,智能家居逐渐融入日常生活。其中,智能窗帘控制系统是智能家居中较为基础和常见的应用,通过远程或自动控制窗帘的开闭,不仅提高了用户的生活便利性,还能帮助节约能源。例如,系统可以根据光线强度自动开关窗帘,从而优化室内光照。本文将详细讲解如何基于STM32设计并实现一个智能窗帘控制系统,从硬件设计到软件实现,全面覆盖整个开发过程
- 一文弄懂开源大型语言模型 (LLM) 应用程序开发平台--Dify
Llama-Turbo
AI大模型程序员LLM人工智能大模型dify
Dify简介Dify是一个开源大型语言模型(LLM)应用程序开发平台,旨在弥合AI应用程序原型设计与生产部署之间的差距。本文为希望了解或扩展该平台的开发者和技术用户提供了Dify架构、组件和功能的技术概述。平台概述Dify提供端到端解决方案,通过可视化工具和API的组合,构建基于LLM的应用程序。其架构旨在支持AI应用程序开发的整个生命周期,包括模型集成、提示、知识管理、工作流编排和部署。主要特点
- 手机赚钱软件哪个可靠?怎么用手机赚零花钱?
好项目高省
目前市面上有很多手机赚钱软件,但并不都是可靠的。建议用户在下载和使用这些软件前,先做好以下几点:京东618红包领取方法:打开京东搜索:“最爱领红包828”或者“红包多多148”,即可进入领取超级红包淘宝618红包领取方法:打开淘宝搜索:“开心就好665”,即可进入领取超级红包1.了解软件的开发商和运营情况。选择知名开发商或公司推出的软件,避免因为开发商或公司的信誉问题而带来风险。2.查看软件的权限
- 面试实战,问题一,讲一下Springboot的作用
SpringBoot框架的主要作用和功能SpringBoot是由Pivotal团队开发的一个开源Java框架,旨在显著简化基于Spring框架的应用程序开发过程。它通过提供一系列自动化工具和约定,帮助开发者快速构建独立、生产就绪的应用程序。下面我将逐步介绍其主要作用和核心功能,确保回答清晰易懂。主要作用简化Spring应用程序开发:SpringBoot的核心目标是降低Spring框架的入门门槛和配
- 【软件测试】从软件测试到Bug评审:生命周期与管理技巧
卜及中
软件工程(测试)bug测试工具软件工程
文章目录一、软件测试的生命周期软件生命周期软件测试生命周期各阶段内容二、Bugbug的概念bug要素bug级别1.按严重程度(Severity)分类2.按优先级(Priority)分类示例冲突场景bug的生命周期三、测试时与开发人员意见不统一Bug是否描述清楚?站在用户角度重新思考问题Bug定级要有依据Bug评审一、软件测试的生命周期软件生命周期我们知道:软件生命周期(SoftwareDevelo
- Vue 3 组合式 API 中的组件生命周期函数详解
码力无边-OEC
Vuevue.js前端javascript前端框架web
Vue3组合式API中的组件生命周期函数详解Vue3引入了组合式API(CompositionAPI),相比于选项式API(OptionsAPI),它更加灵活且易于复用。在组件的开发中,生命周期函数是必不可少的一部分,用于在特定的阶段执行逻辑操作。本文将详细讲解Vue3组合式API的生命周期函数及其相关知识点,并通过语法糖实现相关示例。什么是生命周期函数?Vue组件从创建到销毁的过程中,会经历一系
- socket网络通信TCP与UDP原理及代码实现(c++、python)
目录Socket原理通信协议原理TCPUDP代码实现TCPC++pythonUDPC++pythonSocket原理Socket(套接字)是计算机网络中用于实现进程间通信的一种机制,特别是在不同主机之间通过网络进行数据传输时。它是网络编程的核心概念之一,为应用程序提供了统一的接口,使得开发者可以通过网络发送和接收数据。可以将Socket类比为电话系统中的“电话机”。两台设备通过Socket建立连接
- 开源的大语言模型(LLM)应用开发平台Dify
概述Dify是一个开源的大语言模型(LLM)应用开发平台,结合了后端即服务(Backend-as-a-Service)和LLMOps的理念,旨在帮助开发者快速构建生产级的生成式AI应用。它通过直观的界面、强大的功能和灵活的部署方式,降低了AI应用开发的门槛,即使是非技术人员也能参与应用的定义和数据运营。本文档将指导您了解Dify的核心功能、安装部署、应用创建及常见使用场景。Dify简介Dify(D
- 一份合格的缺陷报告应包含哪些内容?
海姐软件测试
缺陷管理面试bug
在软件测试过程中,缺陷报告(BugReport)是测试人员与开发团队沟通的核心文档。一份清晰、完整的缺陷报告能大幅提升修复效率,减少沟通成本。那么,一份标准的缺陷报告应该包含哪些关键内容呢?1.缺陷报告的核心要素(1)缺陷标题(Summary)要求:简洁、准确,能一眼看出问题本质。示例:✅"【登录页面】输入错误的手机号+密码,错误提示语未显示"❌"登录有问题"(2)缺陷描述(Description
- bug复现不了开发人员不解决,遇到疑难bug该如何排查 ,这两个方法你需要知道。
雨滴测试
功能测试bug功能测试
在测试的时候,有时候经常会遇到一些难以复现的bug,比如有的线上bug在少部分用户哪里出现,但是自己复现却是没有问题的;亦或者是在测试环境上发现了一个偶现bug,然后再复现就很难以找到了;亦或者是出现一个技术问题,像环境部署,明明部署的是没有问题,按照正确的步骤来的,但是就是无法访问系统。那么,像这类问题它都属于恢复性问题,就是正常情况下,它都是没有问题的,但是在操作的过程中产生了某些微小变化导致
- 工具篇:(二)MacOS 下载 MySQL 并进行配置连接,使用 VSCode 创建 Node 项目-亲测有效
全栈探索者chen
mysqlmacos工具macosmysqlvscode
MacOS下载MySQL并进行配置连接,使用VSCode创建Node项目我们将介绍如何在macOS上下载和配置MySQL数据库,并使用VSCode创建一个Node.js项目进行测试。通过这些步骤,您将能够顺利地设置开发环境并进行基本的数据操作。一、删除之前的MySQL配置和软件在macOS系统中,下载并配置MySQL客户端之前,清理掉之前的MySQL配置和相关软件是一个关键步骤。以下是详细的操作流
- 008、Python+fastapi,第一个后台管理项目走向第8步:ubutun 20.04下配置远程桌面、安装vscode+python环境配置
浪淘沙jkp
学习fastapi
一、说明白飘了3个月无影云电脑,开始选了个windowsserver非常不好用,后台改为ubuntu想升级到22,没成功,那就20.04吧。今天先安装下开发环境,后续2个月就想把他当做开发服务器,不知道行不行,公网ip是否可以外部链接。本来想装个宝塔面板直接管理,不过那玩意用了一次,决定说方便也不方便,还是放弃,要用也搞个掏钱的,你懂的,免费的不放心啊那我们就一个一个安装好了,大概要安装mysql
- iOS组件化详解
ideal树叶
iOSobjective-cswiftios
一、为什么要做组件化开发?在iOS项目迭代过程中,随着业务复杂度提升、团队规模扩大,传统单体架构会逐渐暴露以下问题:代码耦合严重:模块间直接依赖(如#import"XXViewController.h"),改一处动全身,维护成本高;团队协作低效:多人开发同一仓库易冲突,代码合并成本高;编译速度慢:单工程代码量过大,每次编译需全量处理,耗时久;复用性差:功能模块无法单独抽离复用(如登录模块在多APP
- 程序员管理与AIStarter开发:如何避免需求Bug,提升项目效率
ai_xiaogui
人工智能智能体国际化AI平台bug程序员管理AIStarter需求沟通避免BugAI模型一键部署教程
大家好,我是熊哥!今天聊聊程序员管理和AIStarter开发中的经验教训。创业公司项目常因需求不清出Bug,比如“管理员删管理员”这种低级错误,引发用户不满。熊哥亲测:程序员管理关键在于明确需求!通过整理需求文档、双向确认、开会逐条对齐,熊哥团队从Bug频发到第二个月问题骤减,AIStarter发布稳定。AIStarter专注AI模型部署(如Ollama),一键安装,免费为主,市场反馈超棒!总结:
- 没有 Mac,如何上架 iOS App?跨平台团队的全流程实践指南
程序员不说人话
ios小程序uni-appiphoneandroidwebviewhttps
在许多以Flutter、ReactNative等技术栈开发的项目中,经常面临一个现实问题:团队缺少足够的Mac设备,可iOS上架流程却被Mac严重绑架。今天我们就来聊聊“没有Mac,如何顺利上架iOSApp?”,结合我们在多个项目中积累的实战经验,分享一整套可复用的跨平台上架方案,让Windows、Linux开发者也能协作完成iOS上架,并保持高效、稳定、安全。为什么“没有Mac”是个上架难题?i
- 全面解析iOS加固工具:功能差异、应用场景与实战选择建议
2501_91591841
ios小程序uni-appiphoneandroidwebviewhttps
随着iOS应用生态的成熟和商业化程度的提高,越来越多的项目对App安全性提出了更高要求。无论是AppStore上线、企业内部分发,还是多渠道外包交付,都面临着防逆向、抗破解、防调试、保护核心资源等常见问题。因此,“加固工具”逐渐成为iOS项目后期安全处理的重要一环。本文将从开发者角度出发,分析当前主流的iOS加固工具,结合项目实战,比较它们的优劣、适用场景与限制,帮助开发团队做出更合理的选型。为什
- iOS WebView 调试实战 localStorage 与 sessionStorage 同步问题全流程排查
2501_91591841
ios小程序uni-appiphoneandroidwebviewhttps
在混合开发项目中,localStorage和sessionStorage常被前端用来临时存储用户状态、页面标记等数据。但这些Web存储在iOSWebView中并不总是如预期稳定,有时会出现数据“存了又丢”、“刷新后状态消失”、甚至“另一个标签页取不到值”等异常,调试难度极高。本文以真实案例为基础,分享如何通过实际流程和工具协作,最终定位存储问题根因并制定稳定方案。一、典型用户反馈:刷新页面后状态消
- 什么是GPT-4T?
亿只小灿灿
人工智能GPT-4T
1.引言:GPT-4T概述GPT-4T是OpenAI开发的新一代多模态大型语言模型,在GPT-4的基础上增强了对表格数据、数学表达式和代码的处理能力。其核心创新在于Transformer架构的优化,使模型能够更高效地处理结构化数据与文本的融合任务。本文将深入探讨GPT-4T的技术原理、应用场景及代码实现。2.GPT-4T核心技术解析2.1多模态输入处理GPT-4T支持三种主要输入模态:自然语言文本
- 京东返利app哪个佣金高?淘宝返利的软件有哪些
桃朵APP
顶级互联网营销大牛东方微信号:26688专注互联网副业20年。强!(联系我可以开营销号)也就是桃朵APP(直接应用市场搜索:桃朵邀请码:123456)也就是乖淘APP(直接应用市场搜索:乖淘邀请码:123456)桃朵APP&乖淘APP创始人-东方微信号:(26688)专注网络引流20年。带过百万团队,徒弟年入百万者有30人。独立开发桃朵APP:对接首席,佣金全网最高,团队收入最高,模式最好,有引流
- [特殊字符] HarmonyOS实战:跨设备文件传输系统的「无缝传送」秘籍
作为一个曾在会议室传1GB演示视频传到崩溃的开发者,今天要分享HarmonyOS分布式文件传输的实战!当初用断点续传功能救了我差点被毙掉的方案,现在把这些救命技巧全公开~一、文件传输的「崩溃瞬间」与需求上周给客户演示方案时,3台设备互传视频差点翻车:断网重传:会议室WiFi突然卡,传了一半的视频要重来多设备共享:手机、平板、电脑都要同步最新版PPT权限控制:怕客户误删源文件,得限制编辑权限Harm
- 【由泥巴匠到教授】随笔第53篇 技校任教
泥巴匠赵仁
技校任教1980年的一天,也就是在没有去上海和北京考察之前,天气特别晴朗。奎生到机械队的技术办公室里把我叫出来。把我领到办公室南边到一个空旷的场子里。这个场子很奇怪,在信阳市遍地都是开发商的足迹的年代,这块空地已经空了40多年了,到现在还是个空旷的场地。奎生对我说,李国斌支书可能在这几天里会找你谈个事情,你一定要答应他。我说,李支书他是我的长辈,特别是在70年代初,咱们一施工队出现反革命匿名信案件
- 快速入门Robocorp:用Python构建和操作工作流
jaioyfpo
python开发语言
快速入门Robocorp:用Python构建和操作工作流引言在现代开发环境中,自动化是提高效率和降低成本的关键。Robocorp作为一个强大的平台,它帮助您使用Python构建和操作工作流,无论在何地运行都可以保持无缝连接和高扩展性。本文将带领您快速入门Robocorp的基本安装和设置,并展示如何使用ActionServer进行项目的创建和管理。主要内容1.安装和设置要开始使用Robocorp,首
- Apache Ignite异常处理与故障管理指南
张栋涓Kerwin
ApacheIgnite异常处理与故障管理指南概述在分布式系统中,异常处理和故障管理是确保系统稳定性的关键环节。ApacheIgnite作为一个高性能的内存计算平台,提供了完善的异常处理机制和故障管理策略。本文将深入解析Ignite中的异常类型、处理方式以及关键故障处理机制,帮助开发者构建更健壮的Ignite应用。Ignite常见异常类型及处理IgniteAPI定义了多种异常类型,每种异常都有其特
- Selenium+Java 自动化测试入门到实践:从环境搭建到元素操作
yy鹈鹕灌顶
seleniumjava测试工具
在自动化测试领域,Selenium凭借其强大的跨浏览器兼容性和灵活的API,成为Web应用测试的首选工具。而Java作为一门稳定且广泛应用的编程语言,与Selenium结合能构建出高效、可维护的自动化测试框架。本文将从环境搭建开始,逐步介绍Selenium+Java的核心用法,帮助新手快速上手。一、环境搭建:让工具跑起来1.安装Java开发环境Selenium的Java客户端需要依赖JDK,建议安
- android单个页面切换_Android实现界面切换的两种方式
weixin_39939918
android单个页面切换
在初学Android开发过程中,一定会遇到实现两个界面互相切换的问题,有两种方法来实现这个功能,小编带大家一起学习一下;这种方法严格意义上不算是界面切换(纯属小编愚见),因为它只是重新设置了一下界面的布局文件;比如我们在eclipse中新创建一个项目工程,会默认给我们两个文件,一个为MainActivity.java,另一个就是activity_main.xml,大家可以这样理解,MainActi
- YAML基础使用教程(单引号和双引号的区别)
奔跑吧邓邓子
工具使用YAML单引号双引号
提示:“奔跑吧邓邓子”的高效运维专栏聚焦于各类运维场景中的实际操作与问题解决。内容涵盖服务器硬件(如IBMSystem3650M5)、云服务平台(如腾讯云、华为云)、服务器软件(如Nginx、Apache、GitLab、Redis、Elasticsearch、Kubernetes、Docker等)、开发工具(如Git、HBuilder)以及网络安全(如挖矿病毒排查、SSL证书配置)等多个方面。无论
- 矩阵求逆(JAVA)初等行变换
qiuwanchi
矩阵求逆(JAVA)
package gaodai.matrix;
import gaodai.determinant.DeterminantCalculation;
import java.util.ArrayList;
import java.util.List;
import java.util.Scanner;
/**
* 矩阵求逆(初等行变换)
* @author 邱万迟
*
- JDK timer
antlove
javajdkschedulecodetimer
1.java.util.Timer.schedule(TimerTask task, long delay):多长时间(毫秒)后执行任务
2.java.util.Timer.schedule(TimerTask task, Date time):设定某个时间执行任务
3.java.util.Timer.schedule(TimerTask task, long delay,longperiod
- JVM调优总结 -Xms -Xmx -Xmn -Xss
coder_xpf
jvm应用服务器
堆大小设置JVM 中最大堆大小有三方面限制:相关操作系统的数据模型(32-bt还是64-bit)限制;系统的可用虚拟内存限制;系统的可用物理内存限制。32位系统下,一般限制在1.5G~2G;64为操作系统对内存无限制。我在Windows Server 2003 系统,3.5G物理内存,JDK5.0下测试,最大可设置为1478m。
典型设置:
java -Xmx
- JDBC连接数据库
Array_06
jdbc
package Util;
import java.sql.Connection;
import java.sql.DriverManager;
import java.sql.ResultSet;
import java.sql.SQLException;
import java.sql.Statement;
public class JDBCUtil {
//完
- Unsupported major.minor version 51.0(jdk版本错误)
oloz
java
java.lang.UnsupportedClassVersionError: cn/support/cache/CacheType : Unsupported major.minor version 51.0 (unable to load class cn.support.cache.CacheType)
at org.apache.catalina.loader.WebappClassL
- 用多个线程处理1个List集合
362217990
多线程threadlist集合
昨天发了一个提问,启动5个线程将一个List中的内容,然后将5个线程的内容拼接起来,由于时间比较急迫,自己就写了一个Demo,希望对菜鸟有参考意义。。
import java.util.ArrayList;
import java.util.List;
import java.util.concurrent.CountDownLatch;
public c
- JSP简单访问数据库
香水浓
sqlmysqljsp
学习使用javaBean,代码很烂,仅为留个脚印
public class DBHelper {
private String driverName;
private String url;
private String user;
private String password;
private Connection connection;
privat
- Flex4中使用组件添加柱状图、饼状图等图表
AdyZhang
Flex
1.添加一个最简单的柱状图
? 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28
<?xml version=
"1.0"&n
- Android 5.0 - ProgressBar 进度条无法展示到按钮的前面
aijuans
android
在低于SDK < 21 的版本中,ProgressBar 可以展示到按钮前面,并且为之在按钮的中间,但是切换到android 5.0后进度条ProgressBar 展示顺序变化了,按钮再前面,ProgressBar 在后面了我的xml配置文件如下:
[html]
view plain
copy
<RelativeLa
- 查询汇总的sql
baalwolf
sql
select list.listname, list.createtime,listcount from dream_list as list , (select listid,count(listid) as listcount from dream_list_user group by listid order by count(
- Linux du命令和df命令区别
BigBird2012
linux
1,两者区别
du,disk usage,是通过搜索文件来计算每个文件的大小然后累加,du能看到的文件只是一些当前存在的,没有被删除的。他计算的大小就是当前他认为存在的所有文件大小的累加和。
- AngularJS中的$apply,用还是不用?
bijian1013
JavaScriptAngularJS$apply
在AngularJS开发中,何时应该调用$scope.$apply(),何时不应该调用。下面我们透彻地解释这个问题。
但是首先,让我们把$apply转换成一种简化的形式。
scope.$apply就像一个懒惰的工人。它需要按照命
- [Zookeeper学习笔记十]Zookeeper源代码分析之ClientCnxn数据序列化和反序列化
bit1129
zookeeper
ClientCnxn是Zookeeper客户端和Zookeeper服务器端进行通信和事件通知处理的主要类,它内部包含两个类,1. SendThread 2. EventThread, SendThread负责客户端和服务器端的数据通信,也包括事件信息的传输,EventThread主要在客户端回调注册的Watchers进行通知处理
ClientCnxn构造方法
&
- 【Java命令一】jmap
bit1129
Java命令
jmap命令的用法:
[hadoop@hadoop sbin]$ jmap
Usage:
jmap [option] <pid>
(to connect to running process)
jmap [option] <executable <core>
(to connect to a
- Apache 服务器安全防护及实战
ronin47
此文转自IBM.
Apache 服务简介
Web 服务器也称为 WWW 服务器或 HTTP 服务器 (HTTP Server),它是 Internet 上最常见也是使用最频繁的服务器之一,Web 服务器能够为用户提供网页浏览、论坛访问等等服务。
由于用户在通过 Web 浏览器访问信息资源的过程中,无须再关心一些技术性的细节,而且界面非常友好,因而 Web 在 Internet 上一推出就得到
- unity 3d实例化位置出现布置?
brotherlamp
unity教程unityunity资料unity视频unity自学
问:unity 3d实例化位置出现布置?
答:实例化的同时就可以指定被实例化的物体的位置,即 position
Instantiate (original : Object, position : Vector3, rotation : Quaternion) : Object
这样你不需要再用Transform.Position了,
如果你省略了第二个参数(
- 《重构,改善现有代码的设计》第八章 Duplicate Observed Data
bylijinnan
java重构
import java.awt.Color;
import java.awt.Container;
import java.awt.FlowLayout;
import java.awt.Label;
import java.awt.TextField;
import java.awt.event.FocusAdapter;
import java.awt.event.FocusE
- struts2更改struts.xml配置目录
chiangfai
struts.xml
struts2默认是读取classes目录下的配置文件,要更改配置文件目录,比如放在WEB-INF下,路径应该写成../struts.xml(非/WEB-INF/struts.xml)
web.xml文件修改如下:
<filter>
<filter-name>struts2</filter-name>
<filter-class&g
- redis做缓存时的一点优化
chenchao051
redishadooppipeline
最近集群上有个job,其中需要短时间内频繁访问缓存,大概7亿多次。我这边的缓存是使用redis来做的,问题就来了。
首先,redis中存的是普通kv,没有考虑使用hash等解结构,那么以为着这个job需要访问7亿多次redis,导致效率低,且出现很多redi
- mysql导出数据不输出标题行
daizj
mysql数据导出去掉第一行去掉标题
当想使用数据库中的某些数据,想将其导入到文件中,而想去掉第一行的标题是可以加上-N参数
如通过下面命令导出数据:
mysql -uuserName -ppasswd -hhost -Pport -Ddatabase -e " select * from tableName" > exportResult.txt
结果为:
studentid
- phpexcel导出excel表简单入门示例
dcj3sjt126com
PHPExcelphpexcel
先下载PHPEXCEL类文件,放在class目录下面,然后新建一个index.php文件,内容如下
<?php
error_reporting(E_ALL);
ini_set('display_errors', TRUE);
ini_set('display_startup_errors', TRUE);
if (PHP_SAPI == 'cli')
die('
- 爱情格言
dcj3sjt126com
格言
1) I love you not because of who you are, but because of who I am when I am with you. 我爱你,不是因为你是一个怎样的人,而是因为我喜欢与你在一起时的感觉。 2) No man or woman is worth your tears, and the one who is, won‘t
- 转 Activity 详解——Activity文档翻译
e200702084
androidUIsqlite配置管理网络应用
activity 展现在用户面前的经常是全屏窗口,你也可以将 activity 作为浮动窗口来使用(使用设置了 windowIsFloating 的主题),或者嵌入到其他的 activity (使用 ActivityGroup )中。 当用户离开 activity 时你可以在 onPause() 进行相应的操作 。更重要的是,用户做的任何改变都应该在该点上提交 ( 经常提交到 ContentPro
- win7安装MongoDB服务
geeksun
mongodb
1. 下载MongoDB的windows版本:mongodb-win32-x86_64-2008plus-ssl-3.0.4.zip,Linux版本也在这里下载,下载地址: http://www.mongodb.org/downloads
2. 解压MongoDB在D:\server\mongodb, 在D:\server\mongodb下创建d
- Javascript魔法方法:__defineGetter__,__defineSetter__
hongtoushizi
js
转载自: http://www.blackglory.me/javascript-magic-method-definegetter-definesetter/
在javascript的类中,可以用defineGetter和defineSetter_控制成员变量的Get和Set行为
例如,在一个图书类中,我们自动为Book加上书名符号:
function Book(name){
- 错误的日期格式可能导致走nginx proxy cache时不能进行304响应
jinnianshilongnian
cache
昨天在整合某些系统的nginx配置时,出现了当使用nginx cache时无法返回304响应的情况,出问题的响应头: Content-Type:text/html; charset=gb2312 Date:Mon, 05 Jan 2015 01:58:05 GMT Expires:Mon , 05 Jan 15 02:03:00 GMT Last-Modified:Mon, 05
- 数据源架构模式之行数据入口
home198979
PHP架构行数据入口
注:看不懂的请勿踩,此文章非针对java,java爱好者可直接略过。
一、概念
行数据入口(Row Data Gateway):充当数据源中单条记录入口的对象,每行一个实例。
二、简单实现行数据入口
为了方便理解,还是先简单实现:
<?php
/**
* 行数据入口类
*/
class OrderGateway {
/*定义元数
- Linux各个目录的作用及内容
pda158
linux脚本
1)根目录“/” 根目录位于目录结构的最顶层,用斜线(/)表示,类似于
Windows
操作系统的“C:\“,包含Fedora操作系统中所有的目录和文件。 2)/bin /bin 目录又称为二进制目录,包含了那些供系统管理员和普通用户使用的重要
linux命令的二进制映像。该目录存放的内容包括各种可执行文件,还有某些可执行文件的符号连接。常用的命令有:cp、d
- ubuntu12.04上编译openjdk7
ol_beta
HotSpotjvmjdkOpenJDK
获取源码
从openjdk代码仓库获取(比较慢)
安装mercurial Mercurial是一个版本管理工具。 sudo apt-get install mercurial
将以下内容添加到$HOME/.hgrc文件中,如果没有则自己创建一个: [extensions] forest=/home/lichengwu/hgforest-crew/forest.py fe
- 将数据库字段转换成设计文档所需的字段
vipbooks
设计模式工作正则表达式
哈哈,出差这么久终于回来了,回家的感觉真好!
PowerDesigner的物理数据库一出来,设计文档中要改的字段就多得不计其数,如果要把PowerDesigner中的字段一个个Copy到设计文档中,那将会是一件非常痛苦的事情。