STM32基于STM32-HAL工程读取DHT11数据
STM32基于STM32-HAL工程读取DHT11数据
- ✨申明:本文章仅发表在CSDN网站,任何其他网站,未注明来源,见此内容均为盗链和爬取,请多多尊重和支持原创!
- 对于文中所提供的相关资源链接将作不定期更换。
- 相关篇《STM32基于STM32-HAL工程读取DHT11/DHT22/AM2302/AM2301》
- 本工程经实物验证没有问题。
- 本驱动案例需要占用一个STM32一个定时器。也就是说在STM32CUBEMX配置的时候要配置一个定时器。
在调试该输出数据时,掉坑里面去了。刚开始以为是驱动代码的问题,没有读到数据,实际上是由于printf输出时,数据类型转换错误或者栈溢出问题导致的。
在使用printf函数输出时注意事项
在使用printf函数打印结构体成员时,需要先通过指针访问结构体成员,然后再将访问结果传递给printf函数。如果直接使用结构体变量,在某些情况下会导致数据类型转换错误或者栈溢出等问题,因此最好使用指针来访问结构体成员。
- ❌错误示范;
//定义了一个结构体
typedef struct
{
uint8_t humi_int; // 湿度的整数部分
uint8_t humi_deci; // 湿度的小数部分
uint8_t temp_int; // 温度的整数部分
uint8_t temp_deci; // 温度的小数部分
} DHT11_Data_TypeDef;
//定义了一个形参为:指向该结构体的指针函数
uint8_t DHT11_Read(DHT11_Data_TypeDef *DHT11_Data)
{
uint8_t buf[5];
uint8_t i;
DHT11_Rst();
if (DHT11_Check() == 0)//检测成功
{
for (i = 0; i < 5; i++) //读取40位字节
{
buf[i] = DHT11_Read_Byte();
}
if ((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4])
{
DHT11_Data->humi_int = buf[0];
DHT11_Data->humi_deci = buf[1];
DHT11_Data->temp_int = buf[2];
DHT11_Data->temp_deci = buf[3];
}
}
else return 1;
return 0;
}
DHT11_Data_TypeDef *dt //创建一个结构体指针变量
DHT11_Read(dt);//将dt结构体指针变量传给进去
/*****以上都没有问题******/
printf("Temp=%d.%d°C,Humi=%d.%d%% \r\n", dt->temp_int, dt->temp_deci, dt->humi_int, dt->humi_deci);
//问题在这一句调试输出上。
在使用printf函数打印结构体成员时,需要先通过指针访问结构体成员,然后再将访问结果传递给printf函数。如果直接使用结构体变量,在某些情况下会导致数据类型转换错误或者栈溢出等问题,因此最好使用指针来访问结构体成员。需要理解的是指针传值操作本身是没有问题的,在printf调试信息输出时最好不要这么用
- ✅正确示范:
typedef struct
{
uint8_t humi_int; // 湿度的整数部分
uint8_t humi_deci; // 湿度的小数部分
uint8_t temp_int; // 温度的整数部分
uint8_t temp_deci; // 温度的小数部分
} DHT11_Data_TypeDef;
//定义了一个形参为:指向该结构体的指针函数
uint8_t DHT11_Read(DHT11_Data_TypeDef *DHT11_Data)
{
uint8_t buf[5];
uint8_t i;
DHT11_Rst();
if (DHT11_Check() == 0)//检测成功
{
for (i = 0; i < 5; i++) //读取40位字节
{
buf[i] = DHT11_Read_Byte();
}
if ((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4])
{
DHT11_Data->humi_int = buf[0];
DHT11_Data->humi_deci = buf[1];
DHT11_Data->temp_int = buf[2];
DHT11_Data->temp_deci = buf[3];
}
}
else return 1;
return 0;
}
DHT11_Data_TypeDef dht{0};//定义一个结构体成品变量并初始化为0;
DHT11_Data_TypeDef *dt=&dht; //创建一个结构体指针变量并将dht的地址赋值给指针变量。
DHT11_Read(dt);//将dt结构体指针变量传给进去
printf("Temp=%d.%d°C,Humi=%d.%d%% \r\n", dht.temp_int, dht.temp_deci, dht.humi_int, dht.humi_deci);
//这样输出就没有问题。
也可以理解未进行未初始化的结构体指针变量的地址不是固定的,在调用完之后再去访问可能不确定了。
- 串口打印DHT11读取到的数据:

STM32CubeMX工程配置
- 定时器配置一个。可以根据芯片自行选择一个定时器。
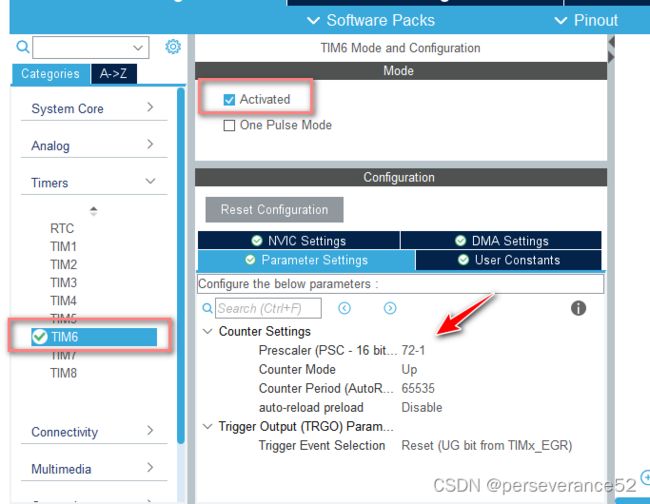
72-1对于STM32F103也就是1MHz,1us周期。
- 配置DHT11数据引脚
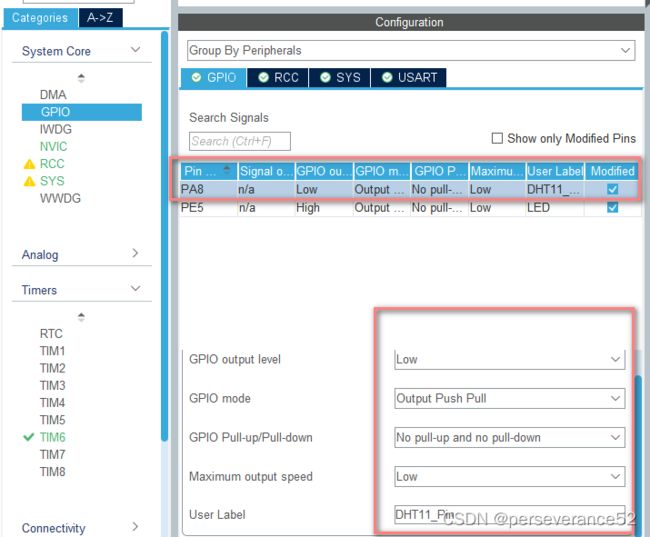
- 配置一个串口用于调试信息输出。

DHT驱动代码
- dht11.h文件
#ifndef _DHT11_H_
#define _DHT11_H_
#include "stm32f1xx.h"
#include "tim.h"
#define _DHT11_TIMER htim6 //移植项目都需要关注这里的定时器句柄
#define DHT11_Pin GPIO_PIN_8 //自定义引脚需要和配置一致
#define GPIO_Port GPIOA //自定义引脚需要和配置一致
#define DHT11_DQ_IN HAL_GPIO_WritePin(GPIOA, DHT11_Pin, GPIO_PIN_SET)
typedef struct
{
uint8_t humi_int; // 湿度的整数部分
uint8_t humi_deci; // 湿度的小数部分
uint8_t temp_int; // 温度的整数部分
uint8_t temp_deci; // 温度的小数部分
} DHT11_Data_TypeDef;
void DHT11_Rst(void);
uint8_t DHT11_Check(void);
uint8_t DHT11_Read_Bit(void);
uint8_t DHT11_Read_Byte(void);
//uint8_t DHT11_Read_Data(uint8_t *temp,uint8_t *humi,uint8_t *tem,uint8_t *hum);
uint8_t DHT11_Init(void);
void DHT11_IO_IN(void);
void DHT11_IO_OUT(void);
uint8_t DHT11_Read(DHT11_Data_TypeDef *DHT11_Data);
#endif
- DHT11.c文件
#include "DHT11.h"
void Delay_us(uint16_t us) //微秒延时
{
HAL_TIM_Base_Stop(&htim6);
__HAL_TIM_SET_COUNTER(&htim6, 0);
HAL_TIM_Base_Start(&htim6);
while (__HAL_TIM_GET_COUNTER(&htim6) <= us);
HAL_TIM_Base_Stop(&htim6);
}
uint8_t DHT11_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIO_Port, DHT11_Pin, GPIO_PIN_SET);
/*Configure GPIO pin : PtPin */
GPIO_InitStruct.Pin = DHT11_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIO_Port, &GPIO_InitStruct);
DHT11_Rst();
return DHT11_Check();
}
//复位DHT11
void DHT11_Rst(void)
{
DHT11_IO_OUT(); //SET OUTPUT
HAL_GPIO_WritePin(GPIOA, DHT11_Pin, GPIO_PIN_RESET); //拉低
HAL_Delay(20); //拉低延时至少18ms
HAL_GPIO_WritePin(GPIOA, DHT11_Pin, GPIO_PIN_SET); //DQ=1,拉高
Delay_us(30); //拉高延时至少20~40us
}
//检测回应
//返回1:检测错误
//返回0:检测成功
uint8_t DHT11_Check(void)
{
uint8_t retry = 0;
DHT11_IO_IN();//SET INPUT
while (HAL_GPIO_ReadPin(GPIO_Port, DHT11_Pin) && retry < 100) //DHT11拉低40~80us
{
retry++;
Delay_us(1);
};
if (retry >= 100)return 1;
else retry = 0;
while (!HAL_GPIO_ReadPin(GPIO_Port, DHT11_Pin) && retry < 100) //DHT11再次拉高40~80us
{
retry++;
Delay_us(1);
};
if (retry >= 100)return 1;
return 0;
}
//读取一个位Bit
//返回1或0
uint8_t DHT11_Read_Bit(void)
{
uint8_t retry = 0;
while (HAL_GPIO_ReadPin(GPIO_Port, DHT11_Pin) && retry < 100) //等待变低电平
{
retry++;
Delay_us(1);
}
retry = 0;
while (!HAL_GPIO_ReadPin(GPIO_Port, GPIO_PIN_8) && retry < 100) //等待变高电平
{
retry++;
Delay_us(1);
}
Delay_us(40);//等待40us
if (HAL_GPIO_ReadPin(GPIO_Port, GPIO_PIN_8))return 1;
else return 0;
}
//读取一个字节
//返回读到的数据
uint8_t DHT11_Read_Byte(void)
{
uint8_t i, dat;
dat = 0;
for (i = 0; i < 8; i++)
{
dat <<= 1;
dat |= DHT11_Read_Bit();
}
return dat;
}
//DHT11读取一次数据
//temp:温度(范围:0~50°)
//humi:湿度(范围:20%~90%)
//tem:温度小数位
//hum:湿度小数位
说明:Data[0]湿度, Data[2]温度。Data[1]和Data[3]分别为0和2的小数位。Data[4]用于校验。
/*
uint8_t DHT11_Read_Data(uint8_t *temp, uint8_t *humi, uint8_t *tem, uint8_t *hum)
{
uint8_t buf[5];
uint8_t i;
DHT11_Rst();
if (DHT11_Check() == 0)//检测成功
{
for (i = 0; i < 5; i++) //读取40位字节
{
buf[i] = DHT11_Read_Byte();
}
if ((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4])
{
*humi = buf[0];
*hum = buf[1];
*temp = buf[2];
*tem = buf[3];
}
}
else return 1;
return 0;
}
*/
//DHT11输出模式配置
void DHT11_IO_OUT()
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
// __HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIO_Port, DHT11_Pin, GPIO_PIN_SET);
/*Configure GPIO pin : PtPin */
GPIO_InitStruct.Pin = DHT11_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIO_Port, &GPIO_InitStruct);
}
//DHT11输入模式配置
void DHT11_IO_IN(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();;
/*Configure DHT11_Pin */
GPIO_InitStruct.Pin = DHT11_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIO_Port, &GPIO_InitStruct);
}
uint8_t DHT11_Read(DHT11_Data_TypeDef *DHT11_Data)
{
uint8_t buf[5];
uint8_t i;
DHT11_Rst();
if (DHT11_Check() == 0)//检测成功
{
for (i = 0; i < 5; i++) //读取40位字节
{
buf[i] = DHT11_Read_Byte();
}
if ((buf[0] + buf[1] + buf[2] + buf[3]) == buf[4])
{
DHT11_Data->humi_int = buf[0];
DHT11_Data->humi_deci = buf[1];
DHT11_Data->temp_int = buf[2];
DHT11_Data->temp_deci = buf[3];
}
}
else return 1;
return 0;
}
主程序代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "DHT11.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
DHT11_Data_TypeDef dht = {0};
DHT11_Data_TypeDef *dt=&dht;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
printf("Hello world! \r\n");
MX_TIM6_Init();
DHT11_Init();
/* USER CODE BEGIN 2 */
uint32_t TimerUART = HAL_GetTick();
// static DHT_sensor livingRoom = {GPIOA, GPIO_PIN_8, DHT11, GPIO_NOPULL};//指定DHT数据引脚
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if ((HAL_GetTick() - TimerUART) > 2500)
{
if (DHT11_Read(dt) == 0)
{
printf("Temp=%d.%d°C,Humi=%d.%d%% \r\n", dht.temp_int, dht.temp_deci, dht.humi_int, dht.humi_deci);
TimerUART = HAL_GetTick();
HAL_GPIO_TogglePin(GPIOE, LED_Pin);
}
else printf("Read error \r\n");
}
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK
| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
工程源码
- ✨申明:本文章仅发表在CSDN网站,任何其他网站,未注明来源,见此内容均为盗链和爬取,请多多尊重和支持原创!
- 对于文中所提供的相关资源链接将作不定期更换。
链接: https://pan.baidu.com/s/1CLG5mUmLziSaz2cV8O5_dA
提取码: g4um