【UR机械臂CB3 网络课程 】
【UR机械臂CB3 网络课程 】
- 1. 前言
- 2. 概览:特色与术语
-
- 2.1 机器人组成
-
- 2.1.1控制柜
- 2.1.2 UR 机器人手臂
- 2.2 接通机器人电源
- 2.3 移动机械臂
- 3. 机器人如何工作
-
- 3.1 选择臂端工具
- 3.2 输入有关臂端工具的信息
- 3.3 连接外部装置
- 3.4 机器人编程
- 4. 设置工具
-
- 4.1 末端执行器配置
- 4.2 工具中心点
- 4.3 设置有效载荷
- 4.4 设置重心位置
- 4.5 示教工具中心点
- 4.5 测试
- 5. 创建程序
-
- 5.1 移动类型
- 5.2训练中移动选型
- 5.3 设计程序1
- 5.4 设计程序2
- 6. 与外部设备互动
-
- 6.1 如何连接和操作夹爪
- 6.2 让机器人等待和响应传感器等外围设备的输入
- 6.3 练习
- 7. 安全设置
-
- 7.1 设置安全扫描仪
- 7.2 设置边界
- 8. 特征坐标
-
- 8.1 什么是特征
- 8.2 定义特征
- 9. 包装
-
- 9.1 设置模式
- 9.2 接近点
- 9.3 模式点1
- 9.4 退出点1
- 9.5 循环命令
- 10. 程序流程
-
- 10.1 if else
- 10.2 变量设置
1. 前言
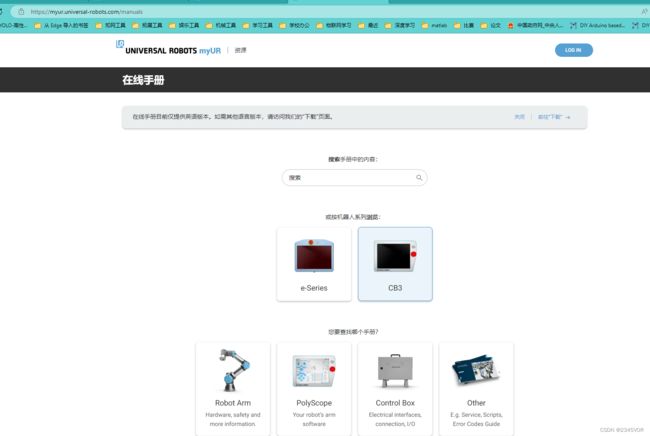
此部分是我在UR官网学习UR机械臂的笔记,非常生动的交互。在这里,您可以找到免费的互动式网络课程模块。
官网地址:https://academy.universal-robots.com/cn/%E5%85%8D%E8%B4%B9%E7%BD%91%E7%BB%9C%E8%AF%BE%E7%A8%8B/

- 进入UR官网,可以点击右上角先注册账号,方便后期顺利浏览和学习。

- 我学习的模块比较老旧,采用旧款CB3网络课程学习,新版的可以采用e-Series网络课程,按需选择

- 进入之后一共有9个模块学习
1.概览:特色与术语
2.机器人如何工作
3.设置工具
4.创建程序
5.与外部设备互动
6.安全设置
7.特征坐标
8.包装
9.程序流程
下面就一一进入学习啦
2. 概览:特色与术语
本模块为您提供了一份关于机器人、用户界面、I/O和各功能的简短介绍,大约需要9分钟。

启动模块,模块简介,此部分会介绍机器人部件的名称及功能,如何接通机器人电源,拖动机械臂

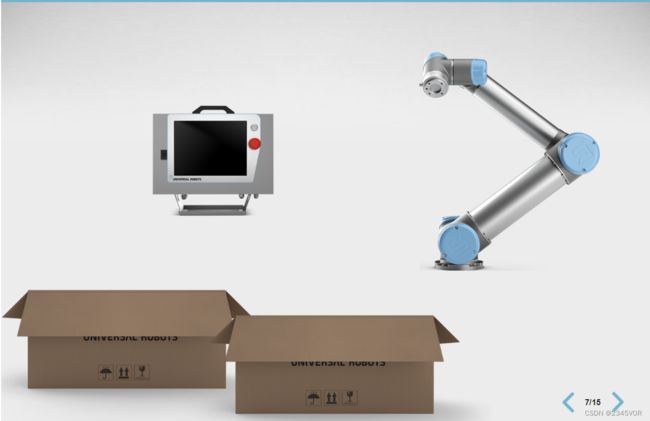
2.1 机器人组成
机器人大体分为控制箱、示教器和机械臂本体
2.1.1控制柜
本章说明了如何将设备连接到控制箱内的 I/O。此 I/O 极其灵活,可用于多种不同的设备,其
中包括气动继电器、PLC 和紧急停止按钮。下图显示了控制箱内部的电气接口布局。

| 文本 | 功能 |
|---|---|
| 黄色,含红色文本 | 专用安全信号 |
| 黄色,含黑色文本 | 可进行安全配置 |
| 灰色,含黑色文本 | 通用数字 I/O |
| 绿色,含黑色文本 | 通用模拟 I/O |
具体介绍见:1.9.3. 控制器 I/O
2.1.2 UR 机器人手臂
UR 机器人手臂由挤压铝管和关节组成。这些关节及其常用名称如图 13.1 所示。机座是机器
人的安装位置,机器人的另一端( 手腕 3) 与机器人的工具相连。通过协调每一个关节的活动,
除了基座正上方及正下方的区域以外,机器人可以自由地移动工具。

UR3技术规格如下

2.2 接通机器人电源
此部分直接插座接通AC220V,控制柜会给其他设备供电。♂️♂️♂️
所有数字 I/O 的通用规范
本节阐述了控制箱的下列 24V 数字 I/O 的电气规范。
• 安全 I/O。
• 可配置 I/O。
• 通用 I/O。
按照电气规范安装 UR 机器人是非常重要的,这三类不同的输入都要做到这一点。
数字 I/O 既可由内部 24V 电源供电,也可通过配置电源接线盒由外部电源供电。终端盒由四
个终端组成。上面两个( PWR 和 GND) 为 24V,内部的 24V 电源接地。接线盒下部的两个端子
( 24V 和 0V) 是为 I/O 供电的 24V 输入。默认配置为使用内部电源,请参见下图。
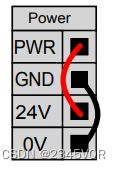
如果需要更大的电流,可如下图所示连接外部电源。

2.3 移动机械臂
科普一下:
坐标系是在机器人或其他空间设置的位置指标系统,以确定机器人的位置和姿势。
工业机器人上的坐标系有六种:大地坐标系(WorldCordinatesystem)、基坐标系(Basecordinatesystem)、关节坐标系(Jointcordinatesystem)、工具坐标系(Torkordinatesystem)、工件坐标系(Workobjectcordinatestem)和用户坐标系。
1.地球坐标系。
地球(世界)坐标系是固定在空间上的标准直角坐标系,固定在事先确定的位置。基于坐标系设置用户坐标系。
2.基坐标系。
基坐标系由机器人底座基点和坐标位置组成,是机器人其他坐标系的基础。
3.关节坐标系。
关节坐标系是设置在机器人关节中的坐标系,是每个轴相对于其原点位置的绝对角度。
4.工具坐标系。
工具坐标系用于确定工具的位置,由工具中心点(TCP)和坐标位置组成。必须提前设置工具坐标系。默认工具坐标系将在没有定义的情况下取代坐标系。
工具坐标系可以通过N(N>=4)点法确定:机器人TCP可以通过N种不同的姿势与指定点接触获得多组解,通过计算获得当前TCP与工具安装法兰中心点(tol0)的相应位置,坐标系方向与tool0一致。
5.工件坐标系。
工件坐标系用于确定工件的位置,由工件原点和坐标位置组成。工件坐标系可采用三种方法确定:点X1与点X2连接形成X轴,点Y1向X轴的垂直线为Y轴,Z轴方向由右手定则确定。
6.用户坐标系。
用户坐标系是用户定制每个工作空间的直角坐标系,用于位置寄存器的教学和执行、位置补偿指令的执行等。大地坐标系将在没有定义的情况下取代坐标系。
一共有三种方法,第一种是示教器的关节坐标系和关节坐标系六组运动,第二种自由驱动按钮人为拖动,最后一种是通讯的方法(modbus,tcp)

上面是示教器的关节坐标系和关节坐标系六组运动

上面是自由驱动按钮人为拖动,位置在示教器背面的黑色按钮,一直按住按钮即可人为拖动到适当范围的适当位置。
当碰到人体或阻力过大导致机械臂的保护性停止

3. 机器人如何工作
在本模块中,您将通过添加末端执行器和传感器让机器人做好抓放任务准备工作。

首先选择臂端工具,然后在示教器上输入有关臂端工具的信息,接着连接外部装置,最后为机器人编程。

3.1 选择臂端工具
UR机械臂搬运工件,选择合适工具安装在手腕的末端工具法兰上

3.2 输入有关臂端工具的信息
工具中心点,工具重心,工具重量,有效载荷

3.3 连接外部装置
传感器检查工件位置信息,提示与机器人的相对位置状态,衔接连续性搬运动作。


3.4 机器人编程
程序结构包括运动和信号处理
移动至左侧滚轮皮带
在左侧滚轮皮带处,等待传感器的输入
拿起工件
移动至右侧滚轮皮带
在右侧滚轮皮带处,等待传感器的输入
放置工件


4. 设置工具
学习如何查找及配置工具中心点、如何教授工具方向,以及如何确定与输入重心和有效负载。

4.1 末端执行器配置
末端执行器有夹爪或点胶机

| 名称 | 定义 |
|---|---|
| 工具 | 放在机器人工具法兰上的任何附属装置 |
| 工具法兰 | 机器人上用来固定工具的部分。 |
| 工具中心点 | 工具中心点指的是工具上与工件发生 接触的部分。 |
| 重心 | 指的是工具上位于该点两侧的重量均匀分配的那个点。 |
| 有效载荷 | 附属工具的重量。 |

4.2 工具中心点
夹爪一般为量接触的点或面的中点,点胶机的喷嘴


设置工具中心点

先清空,然后输入Z位置140,保存配置

4.3 设置有效载荷

先清空,然后输入有效载荷0.6,保存配置

4.4 设置重心位置

勾选复选框,先清空CZ,然后输入20,保存配置

4.5 示教工具中心点
示教工具中心点位置,从四个不同位置接触空间中的同一位置,点击设置系统将自动计算工具中心点


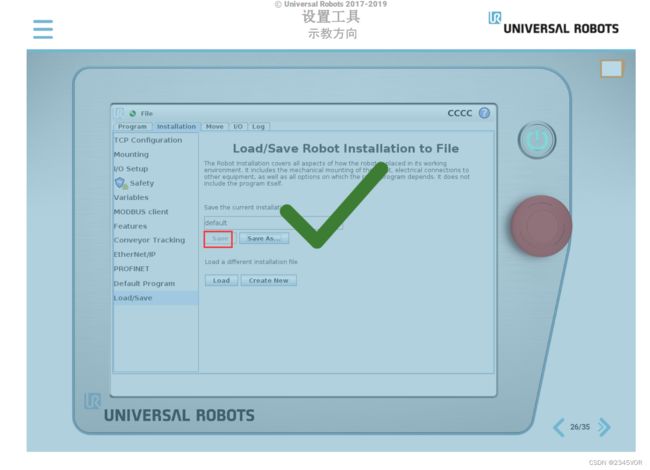
保存加载

机器人的配置文件默认保存default,另存为可以导出后续实验

工具中心点方向,选择机座,设置点

两个方向平行Z轴

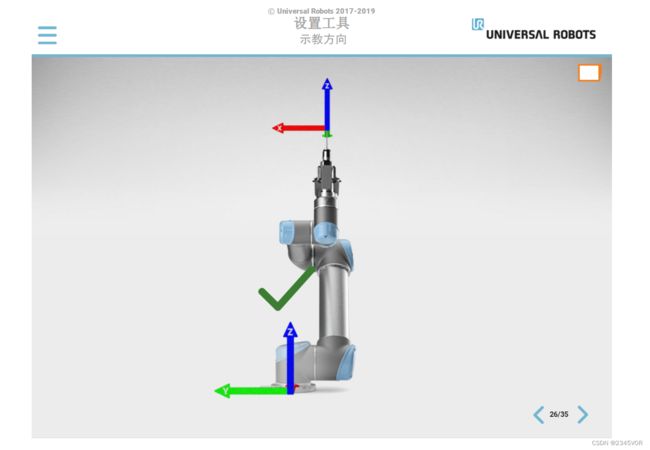
然后点击设置,查看计算的偏转角度,最后保存

4.5 测试





5. 创建程序
在本模块中,您将了解机器人的不同移动类型,然后您将对抓放应用所需的所有动作和路点进行编程。


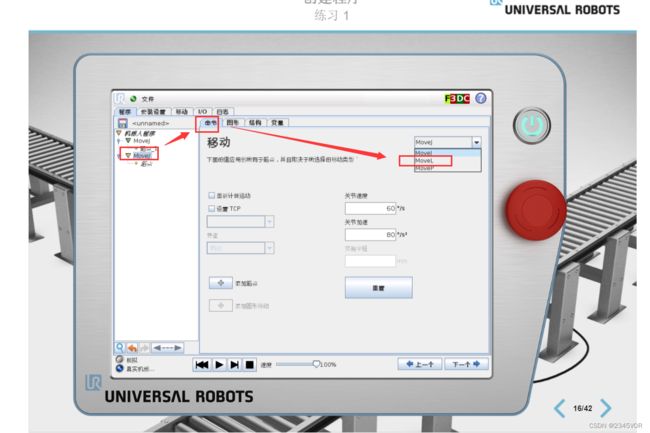
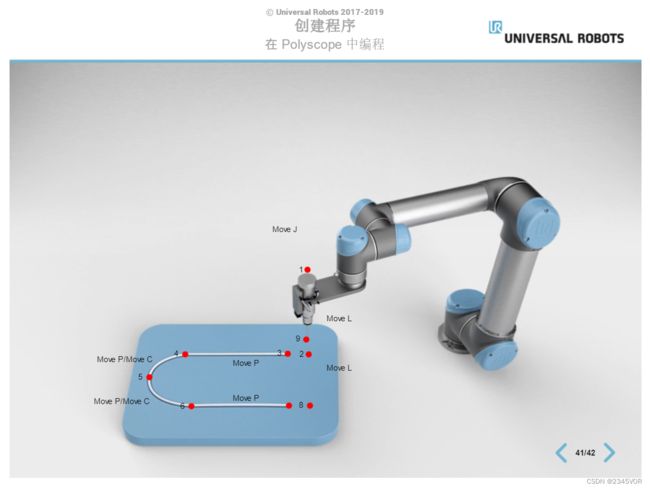
5.1 移动类型
MoveL 线性移动通常用于拿起或放置工件
MoveP 过程移动通常用于工具中心点篙要保持固定速度的情况
MoveJ 非线性移动通常用于在自由空间中移动
MoveC 用于进行圆形移动

5.2训练中移动选型

依次采用:MoveJ——MoveL——MoveL——MoveJ——MoveL——MoveL
5.3 设计程序1

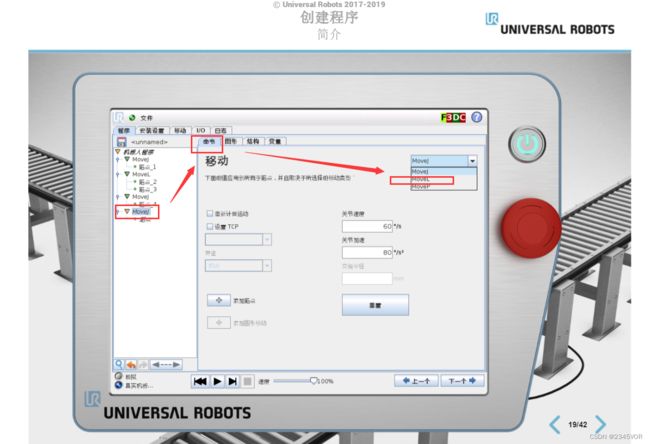
插入下一个路点

选择MoveL
设置此路点,配置到你需要的安全路点位置

在其后添加路点


插入下一个移动
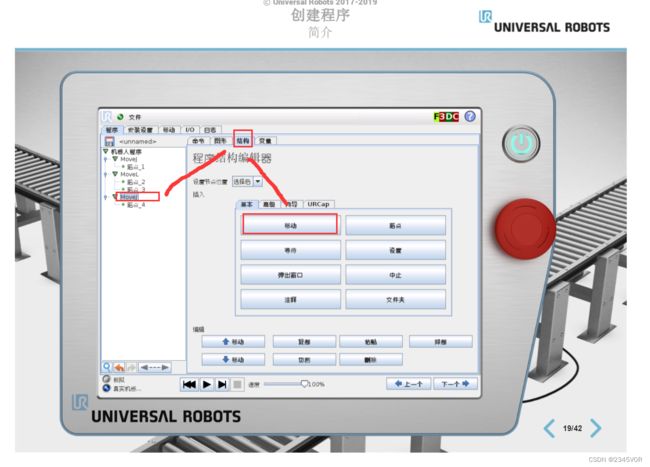
更改为MoveL
5.4 设计程序2
点胶机程序设计


6. 与外部设备互动
在本模块中,您将学习如何利用设置和等待命令操纵夹爪、与传感器交互,以及改变有效负载。最后,您将对抓放应用所需的设置和等待命令进行编程。

6.1 如何连接和操作夹爪
设置命令控制夹爪输出
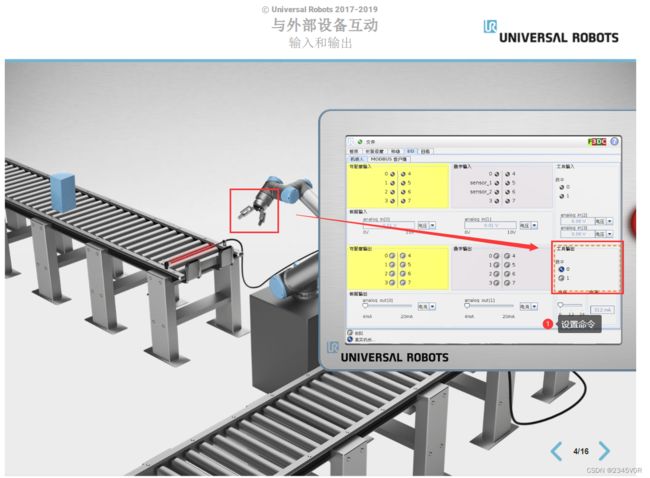
等待命令接收数字输入

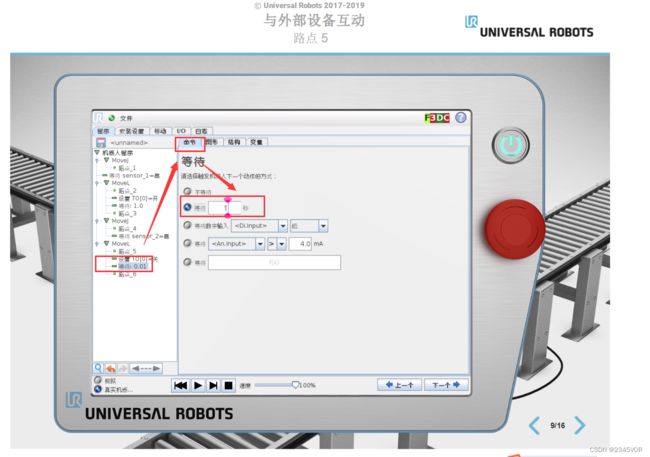
6.2 让机器人等待和响应传感器等外围设备的输入
插入等待选项卡

设置等待命令输入信号以及高低电平

插入设置命令

设置夹爪状态和有效载荷,有效载荷包括工具和工件的总重量

设置合适等待时间,确保夹爪闭合



6.3 练习






7. 安全设置
在本模块中,您将学习如何使用安全扫描仪触发缩减模式,以及如何设置安全边界。
7.1 设置安全扫描仪

设置安全密码


应用

设置生效
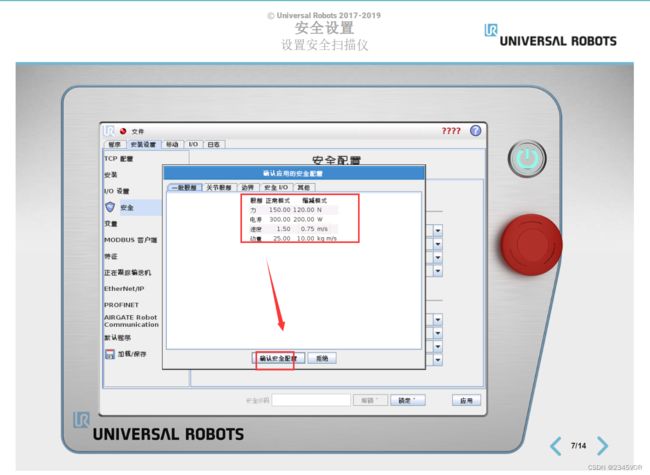
更改缩减等级

7.2 设置边界



边界与工具中心点垂直的虚拟墙




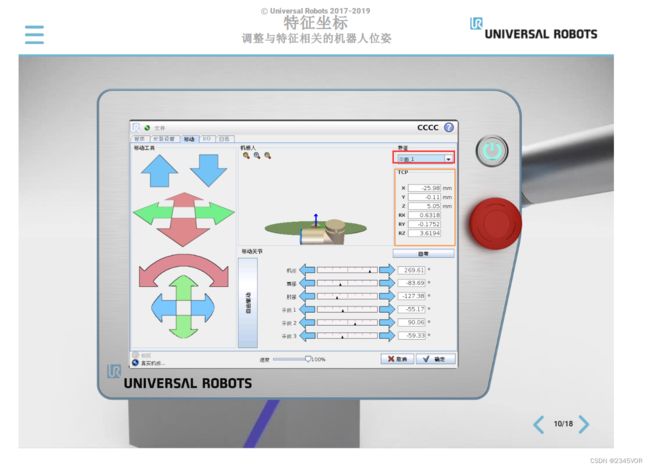
8. 特征坐标
在本模块中,您将学习如何创建用户自定义坐标系,如何对与坐标系相关的路点进行编程,以及如何在不同坐标系中移动机器人。

8.1 什么是特征
XYZ轴六个自由度,机座和工具坐标系是机器人固有属性特征
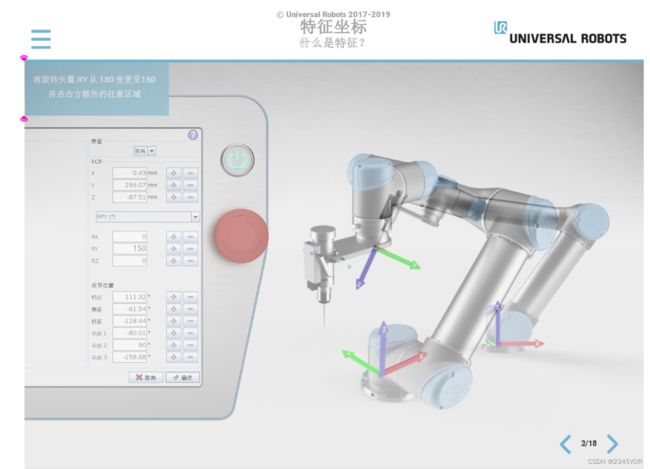
8.2 定义特征













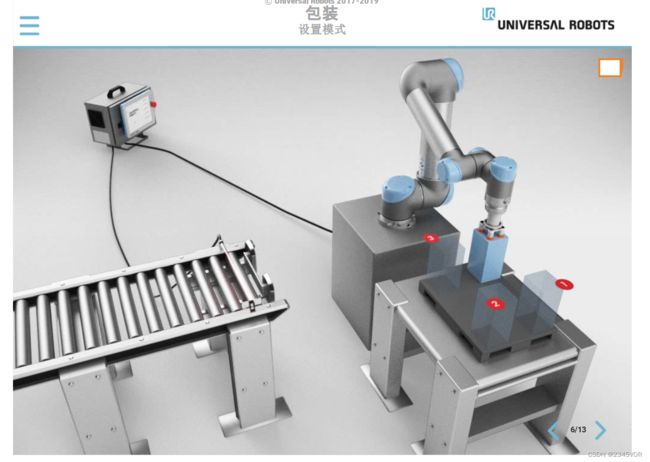
9. 包装
在本模块中,您将学习如何使用机器人托盘向导轻松创建堆垛应用。

工件从传送带搬运到托盘上整齐排列

9.1 设置模式







依次操作接下来的3个角点位置


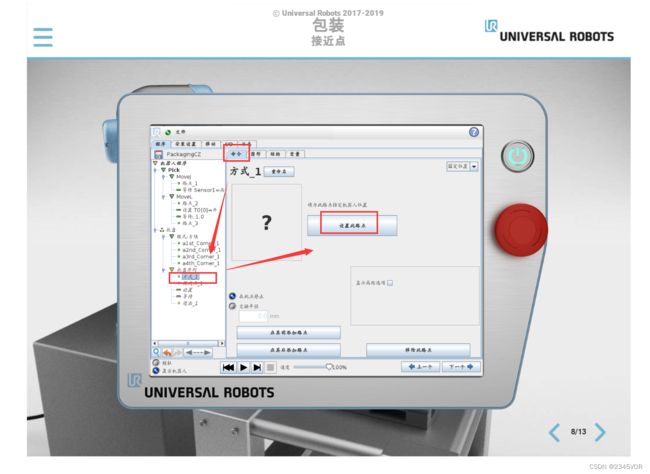
9.2 接近点
上面,侧面,斜角

9.3 模式点1




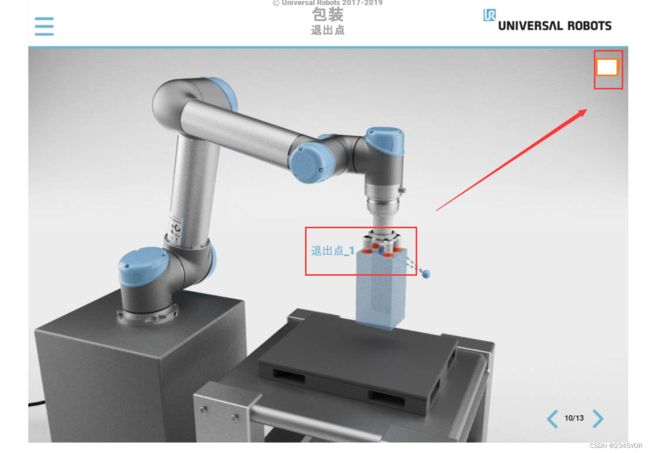
9.4 退出点1

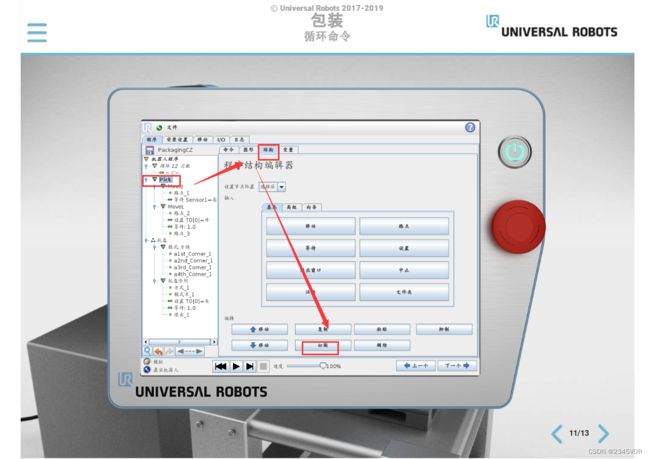
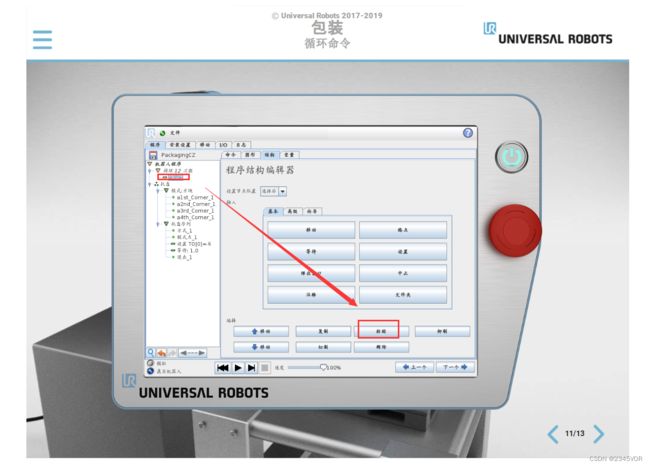
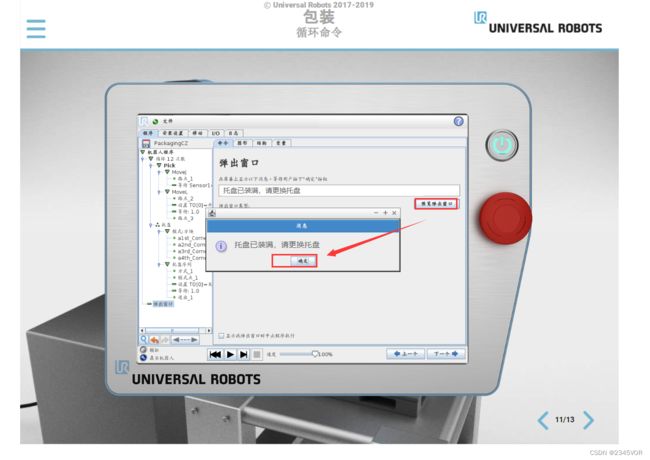
9.5 循环命令








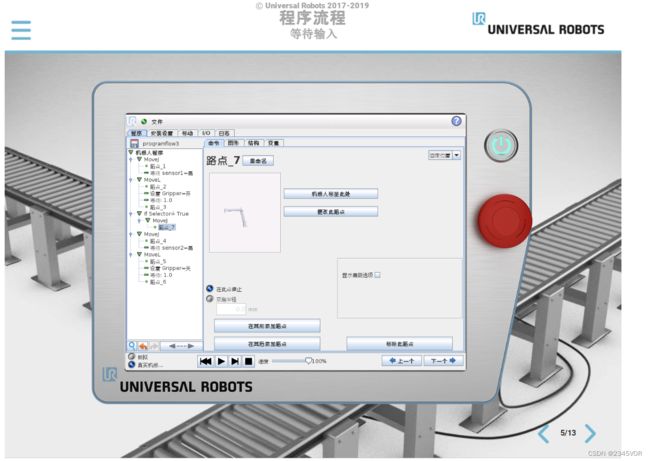
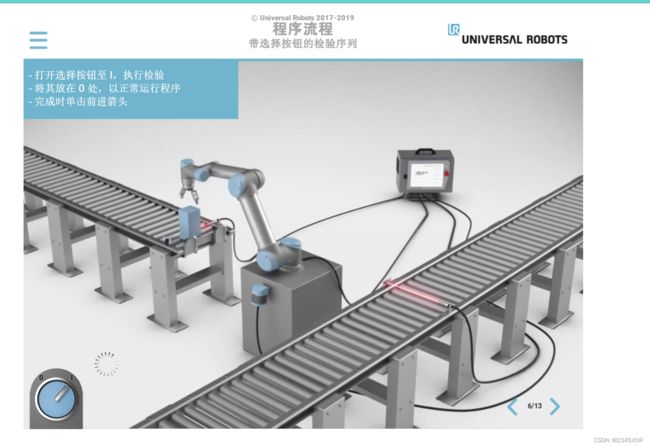
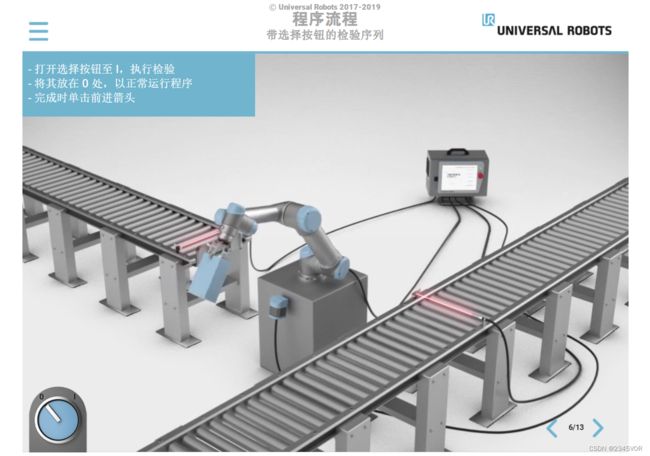
10. 程序流程
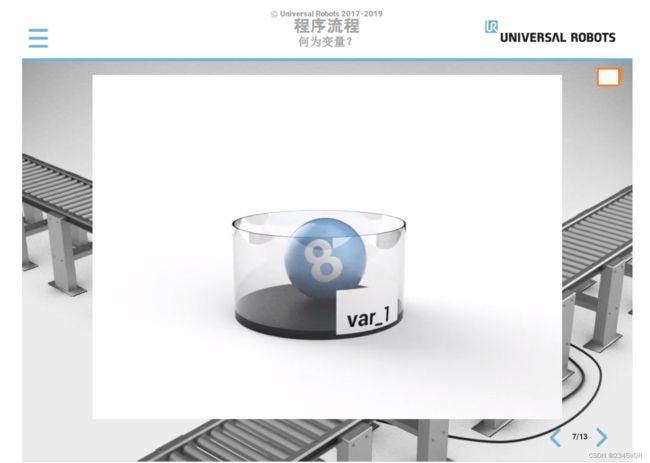
在本模块中,您将学习如何使用变量和 if 语句创建更为高级的非线性程序流程。

质量检验

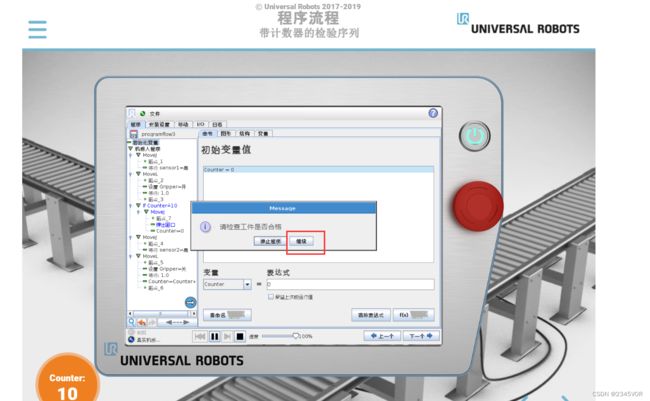
10.1 if else





10.2 变量设置












恭喜大家完成UR机械臂CB3 网络课程 教程

下载文档:https://www.universal-robots.com/download/?query=

UR3中文手册:https://www.universal-robots.com/download/manuals-cb-series/user/ur3/315/user-manual-incl-euromap-67-ur3-cb-series-sw315-chinese-simplified-zh/
在线文档:https://myur.universal-robots.com/manuals