汽车电子电气架构设计中的控制器融合分析
本文由叶日良,姜立标联合创作
摘要
随着汽车智能化、网联化的发展,整车电器功能愈加丰富,对电子电气架构的设计提出了更高的要求。文章综述了汽车电子电气架构的开发流程和发展趋势,并为架构设计中的控制器融合提供了分析方法和参考案例;应用结果表明,该分析方法可有效提高电子电气架构设计的效率。
前言
近年来,汽车工业飞速发展,呈现出智能化、网联化、电动化、共享化的“新四化”发展趋势。汽车的“新四化” 离不开电子电器功能的增加和电子电气架构的支撑。电子电气架构设计也逐渐成为国内外各大汽车厂商研究的一个热门领域。电子电气架构设计主要包含功能分配、整车电源模式设计、总线网络架构、通信信号设计以及整车线束拓扑设计等内容,它是所有电器部件的上层开发和顶层设计,规定了各电气系统之间的关联和兼容性。
1 电子电气架构开发流程
在电子电气架构正向开发流程中,一般由利益相关者根据场景的分析提出功能性和非功能性的需求;利益相关者不仅包括终端用户、产品企划部门,也包含工程开发人员、成本工程师和售后维修人员等;功能性的需求主要指所开发车辆需要实现的功能,例如是否能提供驾驶辅助、是否有联网功能等;非功能性需求主要关注车辆的性能、安全性、成本、开发可实现性、维修便利性等指标。
在明确了功能性和非功能性需求的约束之后,需站在电气的角度进行子功能的定义,将所有功能性和非功能性的需求转化为一个个电气逻辑单元或软件模块;这些电气逻辑单元或软件模块会被分配到各个控制器中,由各个控制器配合完成整车电器功能,即所谓的功能分配。不同的功能分配方案,导致了架构设计的差异,也决定了控制器数量多少,并影响总线网络拓扑的形态。因此,电气架构设计面临的真正挑战是如何进行功能分配,并进行概要设计和整体把控。
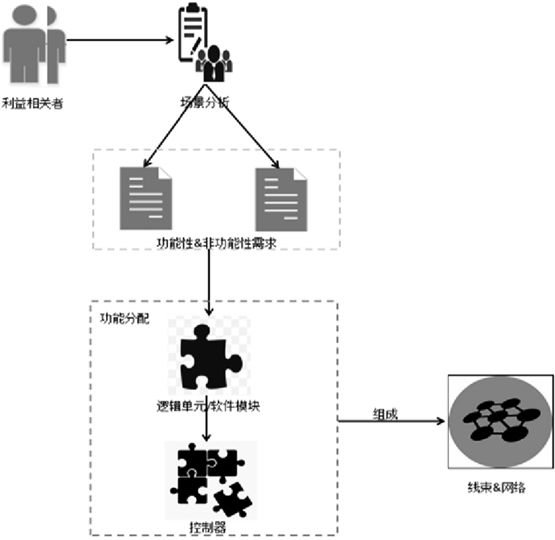
图 1 电子电气架构开发流程
2 电子电气架构发展趋势
近年来,随着汽车“新四化”的发展,整车电子电器功能逐渐增多;以自动驾驶为例,随着辅助驾驶自动化级别的提升,车辆需要布置的传感器越来越多,相应的控制逻辑也越来越复杂。

图 2 电子电气架构发展趋势
面对电器功能的增加,电子电气架构也在不断地发展; 传统的架构设计往往采用分布式的方案,即使用模块化的控制器来搭建架构;例如,对于座椅的控制,就会有相应的座椅模块控制器对座椅进行位置调节、加热通风等控制;对于新增加的功能,就要考虑开发新的控制器来满足功能需求;因此,在这种分布式的架构中往往存在许多功能相对简单、算力低的控制器;随着电器功能的增加,以及车载控制器算力的提升,架构设计逐步向集成式的方向发展;集成式的架构是通过对整车功能的梳理,将属性相似的功能集中在某些控制器中,由算力较高的控制器进行功能实现;例如,对于车灯、雨刮等车身相关附件的控制,会集中在车身控制器(BCM)中进行统一控制;近年来,这种集成式的架构快速发展,出现了“域”控制器甚至中央计算单元这样高度集成的车载控制器,这些域控制器或中央计算单元具有极高的算力,融合了复杂的整车功能,可以应对汽车“新四化”的发展需求;综上,汽车电子电气架构的演变过程如图 2 所示,从功能开发的角度看,功能的集中化和控制器的融合是未来架构发展的趋势;而如何在架构设计中,考虑功能地集中和控制器的融合,已逐渐成为整车设计厂(OEM)关注的重要课题之一。
3 控制器融合分析
当前电子电气架构的典型特征是将整个体系结构分为不同的域,如车身域、底盘域、动力域,信息娱乐域等,每个域对一部分控制器进行整合,这些控制器通过共享总线系统进行通信;对于域内的控制器能否进行融合,甚至进行跨域控制器的整合,以下为几个关键的考虑因素:
3.1 控制器功能的相关性
这是考虑控制器融合的首要驱动力;将功能相关的控制器进行融合,往往可以复用一些共同的软件模块,从而提高系统整体的开发效率。
3.2 控制器之间交互的复杂性
架构设计的另一项重要内容就是通信系统和通信信号的设计;在进行控制器融合分析时,需要关注控制器之间信号交互的接口;如果融合之后可以减少通信信号量,就便于后续通信网络的设计,同时也能减少线束连接,从而减轻整车重量,实现轻量化。

图 3 控制器信号交互与控制器融合
3.3 架构设计的灵活性
在谈到架构设计时,我们往往希望能够用一套架构方案去指导多款车型的开发,从而实现车型的快速迭代开发和市场投放;因此,所设计的架构需具有一定的灵活性和伸缩性; 好的控制器融合方案一定是考虑了不同车型、甚至跨平台车型的功能性及非功能性需求,从而保证架构方案的灵活性。
3.4 产品的可实现性
控制器的融合,往往意味着开发难度的增加,那么,产品是否具有可实现性就成了控制器融合方案的重要约束条件;因此,从可实现性的角度看,在进行控制器融合分析时, 需考虑融合后的方案是否成熟,是否有相应的供应商资源以及成本是否可以接受等等可实现性相关的内容。
从上述的分析可以看出,控制器的融合分析,需要考虑的因素有很多,而这些因素之间往往又相互影响,因此控制器的融合分析在架构设计中是一项复杂的系统性工作,需进行综合评估。
4 案例:Tbox与网关控制器融合分析
随着智能化,网联化的发展,越来越多的车型上搭载了Tbox 和网关控制器。Tbox 的主要特点是控制器中含有 4G 或 5G 通信模块,可以实现车辆与后台的数据交换,并利用这些数据开发出丰富的网联功能,如远程控制车辆、车辆状态查询等;网关控制器的主要特点是其包含一种或多种车载总线芯片,如 CAN 总线芯片、以太网总线芯片等,可以实现车内总线信号的转发和路由。目前,对于是否将 Tbox 和网关控制器进行融合,行业内都有相关的探索;下面,就结合上述的考虑因素并对其加以细化设计,建立一套分析控制器融合的评价方法,并利用该评价方法,对 Tbox 和网关控制器是否融合的两套方案进行对比分析。
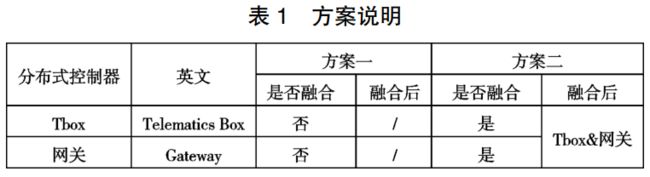
4.1 方案说明
方案一:Tbox 和网关控制器不融合,为单独控制器的分布式方案;
方案二:将 Tbox 和网关进行融合,为集成式地融合方案。
4.2 评价维度及说明
4.2.1 控制器数量
功能的集成和融合能够减少控制器的数量;因此,控制器数量越少,表征控制器融合越彻底。此项可由架构系统工程师进行评估。
4.2.2 通信通道数
如果分布在不同控制器中的软件模块之间需要进行数据交换,那么就需要在控制器中设立相应的通信通道。此项可由总线工程师进行评估。
4.2.3 通信复杂性
交互复杂性与功能分配密歇相关,软件模块之间的逻辑接口越多,交互越复杂;在总线通信层面,可以用总线的负载率进行衡量。此项也可由总线工程师进行评估。
4.2.4 静态电流
静态电流水平是整车性能的一项重要指标;整车静态电流过高会增加蓄电池发生馈电的风险。在进行控制器融合分析时,要识别出哪些功能需要一直保持工作,哪些功能在整车休眠后仍然会周期性的唤醒并工作;如遥控钥匙功能,其控制器会周期性的唤醒来寻找周边的钥匙,这些功能会影响控制器融合后的整体静态电流水平。此项可由测试工程师进行评估。
4.2.5 技术开发复杂性
如果对控制器进行了融合,意味着在一个控制器中需要实现比以前更多的功能;因此,在控制器硬件上需要更强的算力,在软件上需要使用新的技术,如虚拟化 Hypervisor 等; 同时,也需要进行更严格的测试来保证功能在这个新的控制器中能够很好的运行。此项可由软硬件开发人员进行评估。
4.2.6 可实现性
除了在技术上需要评估方案是否成熟,还需要考虑现有的供应商资源和能力,以及开发所需的成本和周期;此项可由产品工程师结合市场调研分析后进行评估。
4.3 计分方法
为了更直观地对控制器融合方案进行对比,可以对每一个评价维度用 0-5 进行计分,并参考维度说明进行打分,得分越高,代表越优;0 分表示不相关或暂时无法评价。
4.4 计分结果
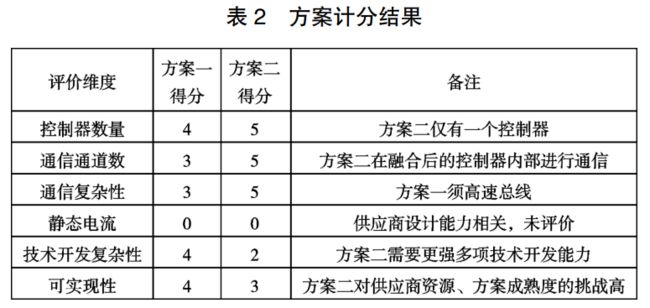
通过架构工程师、总线工程师、产品工程师及测试工程师多人参与后,对方案一和方案二进行了综合打分,计分结果如下:
4.5 计分结果说明
① 控制器数量:显而易见,方案二在控制器数量方面更占优势。
② 通信通道数:在方案二中,Tbox 和网关的所有功能集中在同一个控制器中,因此,所有功能的交互在同一个控制器内部完成,通信通道数相应减少,融合方案更优。
③ 通信复杂性:随着车联网服务的丰富,车内车外需要交互的数据量越来越大;例如,很多整车设计厂(OEM)会将越来越多的驾驶数据、车辆状态数据上传后台进行大数据分析,也会通过后台使用 OTA 技术,对车辆进行远程升级; 如果采用方案一,在 Tbox 和网关控制器之间需要开发高速通信总线。
④ 技术开发复杂性:对于方案二,在一个控制器中既要设计对外的 4G 或 5G 通信,又要开发车内高速总线通信;同时,为了保护车辆的信息和安全,需要进行防火墙的开发, 并确保车内通信的实时性要求。因此,方案二的技术更复杂, 开发难度更高。
⑤ 可实现性:基于方案二较高的开发难度,在国内,同时掌握 Tbox 和网关控制器核心能力的供应商资源相当有限,也缺少量产的实绩。因此,就可实现性而言,方案一更优。
⑥ 静态电流:静态电流的大小,与供应商软硬件设计强相关;在架构设计阶段,如已有其他车型相关控制器数据, 可以进行评估,此处,暂不考虑。
相应的雷达图如下:
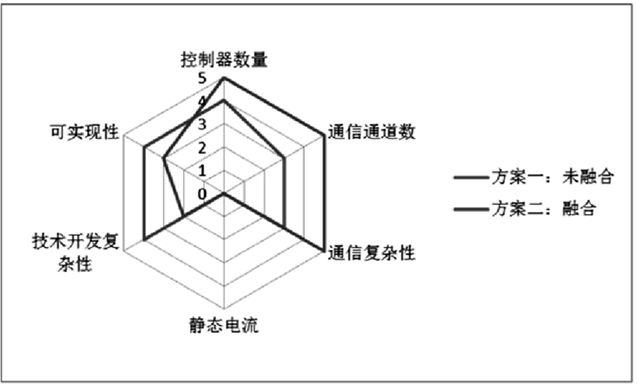
图 4 方案结果雷达图
从雷达图可以很明显地看出,Tbox 和网关控制器融合后的方案在减少控制器数量、降低交互复杂性方面具有较大优势,但是,在技术开发复杂性和可实现性方面具有一定的瓶颈和挑战。
当然,上述 Tbox 和网关控制器的融合分析,仅是相对简单的一个例子,在实际架构设计中,还会面临许多更复杂、更具挑战性的问题,例如在进行跨域融合分析时,往往会出现多套控制器融合的方案,需要评价的维度也更多;因此, 可以在参考上述分析方法的基础上,结合整车设计厂(OEM) 自身的实际情况对评价维度及计分方法进一步优化。例如: 针对所关心的要点,设计更多的评价维度,并尽可能对指标进行量化;在做方案选择时,可以对各评分项目计算总分,也可以对每项评价指标设定相应的权重,再进行加权汇总,并同时考虑是否存在一些“一票否决”的维度。
5 结论
综上所述,汽车智能化、网联化的发展不仅带来了电器功能的快速迭代,也对电子电气架构的设计提出了新的挑战;本文为架构设计中的控制器融合提供了分析方法和参考案例,希望能为后续相关设计和分析提供思路借鉴,从而提高架构设计的整体效率和效果。
参考文献
[1] 蒋映中,吴泽民,冯超等.乘用车整车电气系统开发的新趋势及实现方式[A].中国汽车工程学会.2013 中国汽车工程学会年会论文集[C].中国汽车工程学会:中国汽车工程学会,2013:5.
[2] 胡朝峰.面向功能的电子电器架构分析方法[J].汽车电器,2018 (003):13-14.
[3] Navale V M,Kyle W,Athanassios L,et al.(R)evolution of E/E Archite-ctures[J].SAE International Journal of Passenger Cars-Electronic and Electrical Systems,2015.8(2):282-287.
[4] 华一丁,龚进峰,戎辉,等.基于模型的智能汽车电子电气架构发展综述[J].汽车零部件,2019,128(02):63-66.