树莓派4B小车部署yolov5s
记录自己部署的过程以及遇到的坑,供大家参考。
前期准备:
硬件:树莓派4B小车、摄像头(本人使用的是USB款)
软件:VNC Viewer(远程控制)、FileZilla Client(文件传输)
1.首先去github下载好yolov5的文件以及需要用到的权重。
2.将下载好的yolov5文件进行解压,并把权重放入该文件夹,利用FileZilla Client软件将文件夹传输到树莓派中。
3.利用VNC Viewer在树莓派上安装需要的包:
(1)首先需要更换源,打开终端输入,输入以下代码,进入软件源配置文件地址:
sudo nano /etc/apt/sources.list注:sudo:是指用系统管理员权限启动(非常关键,很多指令报错往往加上这个就解决了)
nano: 是树莓派内置的轻量文本编辑器
在打开的list文件中,将已有的源注释或者直接删去,然后换上其他源,以清华为例,如下图: 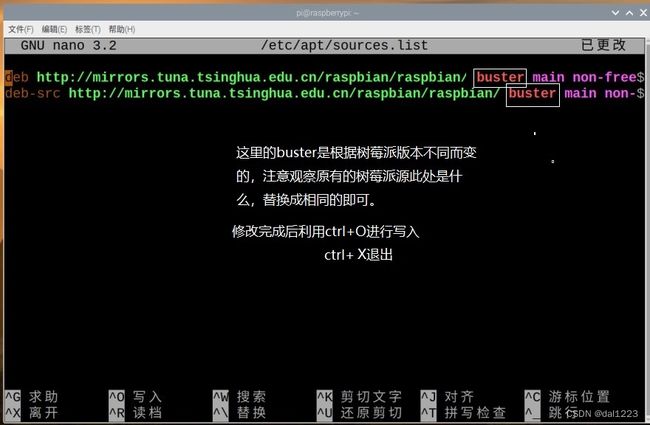
deb http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ bullseye main non-free contrib rpi
deb-src http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ bullseye main non-free contrib rpi修改完成后打开终端输入:
sudo apt-get update这个命令会访问源列表里的每个网址,并读取软件列表,然后保存在本地。
(2) 安装yolov5-6.1所需要的包
cd yolov5-6.1/
pip3 install -r requirements.txt虽然已经换了源,但是还有会有很多包是下载慢或者报错的(如torch、torchvision),这个时候就需要在电脑上提前下好,再传到树莓派上。
GitHub - sungjuGit/PyTorch-and-Vision-for-Raspberry-Pi-4B
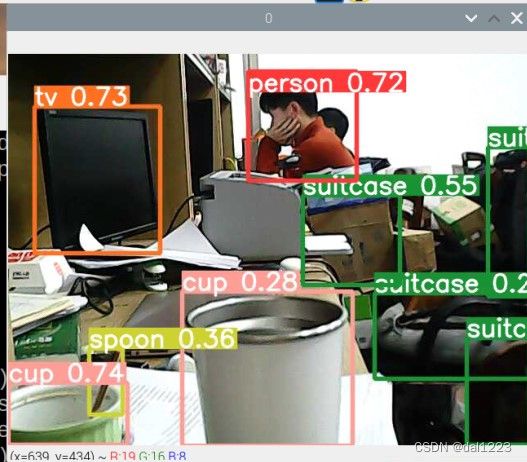
(3)下载完毕后就可以运行detect.py:
python3.7 detect.py
如果想调用摄像头,source设置为0即可,但是这里可能会遇到错误:PermissionError: [Errno 13] Permission denied: 'runs/detect/exp'
查了半天没结果,后来在前面加了sudo即可。
sudo python3.7 detect.py
参考资料:
http://t.csdn.cn/dmAXf
http://t.csdn.cn/Bw99p
http://t.csdn.cn/k7WqH