国内主机整车EEA架构汇总
已剪辑自: https://mp.weixin.qq.com/s?__biz=Mzg4NjIxODk4Mg==&mid=2247499690&idx=1&sn=399f53ee7de909f3f057eba7d74807cd&chksm=cf9fb623f8e83f35a132229b5c24e1e2dcb92a2250eb1b507e25cb9b4011e96b48475ce2497e&scene=21#wechat_redirect
在车辆的电子电气架构方面,特斯拉是引领者也是全面变革者,早在2012年 Model S有较为明显的功能域划分,包括动力域、底盘域、车身域, ADAS模块,到2017 年特斯拉又在Model3 突破了功能域的框架,实现了中央计算+区域控制器框架。
这两年,国内各个主机厂也在各家的技术日公开了自家的下一代电子电气架构。到目前为止,基本上国内主流主机厂的下一代电子电气架构都公布了,今天正好来对其做个梳理。
小鹏
从小鹏成立至今,电子电气架构经历过三代的迭代,如图1所示首先2018年G3上是传统的分布式架构,到2021年P7上是域控架构,如图2所示,在G3的分布式架构基础上,进行跨域整合,分层域控。分层域控是指功能域控制器( 智驾域控制器、车身域控制器)与中央域控制器并存,跨域整合是在分布式架构的基础上将部分控制器功能进行整合,混合设计是指传统的面向信号的交互和面向服务的交互并存。

▲图1 小鹏电子电气架构迭代

▲图2 小鹏P7的域控架构
小鹏最新的电子电气架构名叫X-EEA3.0,如图3所示,已经在不久前的发布的G9上搭载了。在硬件架构方面,采用了中央超算(C-DCU)加区域控制的架构,其中中央超算负责车控、智驾、座舱三大功能,区域控制器分为左右两个,将更多控制件分区,并且根据就近配置原则,分区接管相应功能,大幅缩减线束。
在域控内部,对各个功能进行的内存分区,软件升级互不干涉,30分钟内可以完成升级,并且可以做到无感升级,可以边开边升级。
在通信架构方面, X-EEA3.0采用千兆以太网为主干的通信架构,支持以大量数据传输为基础的高级别自动驾驶、智能座舱、OTA 等智能功能。同时支持多通讯协议。
在电力架构方面,可实现场景式精准配电,可根据不同用车场景按需配电, 比如在路边等人时,可以只对空调、座椅调节、音乐等功能供电,其他部分断电,这样就能节能耗,提高续航里程。车辆定期自诊断,主动发现问题,引导维修,以科技手段赋能售后。

▲图3 小鹏X-EEA3.0架构
蔚来
关于蔚来的电子电气架构信息,只在上次的演讲上听到过他们下一代的一些信息,下一代蔚来的选择是区域控制器架构,整个系统由中央计算单元、四个区域控制器和高速以太网构建基本骨架,通过三者的协同,构建自适应、自学习系统,并且提供广泛的智能互联功能。
由于蔚来资料管的很严,资料的原图就不能展示了,贴个类似的图,环形拓扑,支持Fail-operational的双冗余系统,具有良好扩展性。
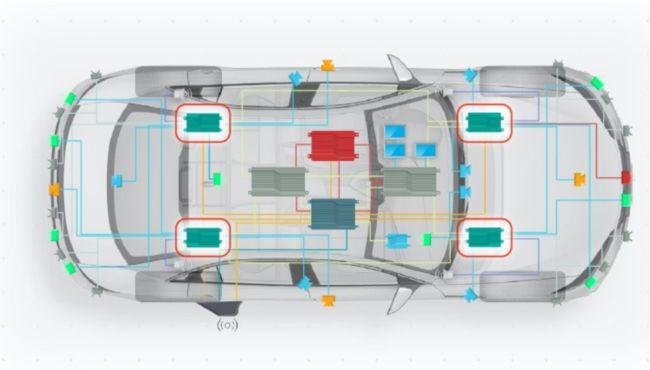
▲图4 蔚来的下一代电子电气架构(示意图)
其中中央计算单元在性能上拥有1000TOPS以上的算力,主频大于1GHz。结合之前英伟达的官网信息,中央计算单元的主控是英伟达的Orin芯片,而且是由现有的Adam超算平台迭代过来的。

因为在最新的ES7上将搭载蔚来的Aquila 蔚来超感系统。该系统中有一个Adam超算平台。该平台的由四个 DRIVE Orin 系统级芯片(SoC)构成,所提供的超过 1000 TOPS 的算力,前两个系统级芯片负责处理车辆传感器组每秒产生的 8 千兆字节数据。第三个 Orin 作为备份,确保系统能够在任何情况下安全运行。第四个 Orin 支持本地训练,通过车队学习改进车辆并根据个人用户的喜好实现驾驶体验的个性化。

图6 蔚来的adam超算平台
Adam超算平台可以驱动各种智能功能并留出足够的裕量用于在未来通过 OTA 增加新功能。
对于区域控制器而言,其是一个支持中央计算平台的汽车小脑系统,其功能是:
1.分布式边缘计算框架;
2.车控仲裁中心;
3.面向服务通信的信息通信网络;
4.区域集中式数据中心;
5.整车配电枢纽;
6.获取智能传感器的数据和控制智能执行器的行为;
为了实现上述的功能,以及实现上面提到的平台化、高内聚低耦合、高重用性、灵活部署的特性,软件必须是面向服务的架构、广泛的采用中间件(SOME/IP、DDS等)。
这就需要对现有的软件架构进行重构,首先是引入远程调用方式(RPC),这也是SOA思想的核心,第二需要对传统常用的是本地调用方式(LPC)进行重构(这种方式是函数的本地调用、没有统一的机制和标准),比如统一RPC与LPC的接口,让LPC模拟Method、Request/Responce、Fire/Forget、Event等通信方式,实现服务对下层无感调用。
另外由于区域控制器的资源有限,为了实现跨域功能融合、跨域功能隔离。蔚来的方法是在区域控制器上采用AMP多核架构,AMP 模式的 RTOS 在各个 CPU 上均运行一个操作系统实例,这些操作实例不一定完全相同。
这样方式具有不需要MMU、运行开销小,支持不同功能安全等级的系统融合的特性,但是也带来了一些挑战,比如核心的负载没有统一的管理、多核通信机制开销、不同核心之间的启动时序难以管理等。这种工程技术问题随着经验和时间的积累,肯定是没问题的,况且蔚来已有自研域控制的经验积累,

▲图7蔚来ES8上自研底盘域控制器
理想
理想的电子电气架构发展分三步走,从分布式架构开始,过渡到域控架构,再到重要中央计算单元架构,如图8所示。
分布式架构主要应用在理想ONE,主要围绕NOA自动驾驶控制器和 HU智能座舱控制器展开。

域控制器架构将搭载在L9车型上,整车分为三个控制域:中央控制域控制器、自动驾驶域控制器、智能座舱域控制器。中央控制域控制器(如图9所示)包含动力、车身、部分底盘的功能,主要融合了车身控制器和中央网关,主控芯片为恩智浦最新的S32G车规级芯片,并且部硬件、系统、软件的均为理想研发。

另外自动驾驶控制域是基于主流的的英伟达Orion来构建的,并且使用了两片orin芯片,智能座舱域控制器是基于高通的8155构建的,也使用了两片。
理想的域控架构之后的下一代就是中央计算平台+区域控制器架构,并且会加入800V快充技术。中央计算平台(CCU)与特斯拉FSD的思路一样,将智能座舱控制和自动驾驶控制,以及车辆控制融合到一个控制器中,但是目前还不清楚是各个功能分离成不同的PCB板,还是全部融合到一块PCB板上。
CCU的功能架构如图10所示,CCU将车辆控制、自动驾驶、智能座舱多域融合,硬件资源共享,数据实时共享。在硬件上采用各领域内最先进的芯片,并通过高带宽低时延Switch级联,实现算力扩展和多域融合;软件方面具有高安全,硬实时OS, 中间件及应用运行环境,软件的性能参数如图11所示,具有延时低、高算力等特点。

▲图10 CCU的内部功能架构
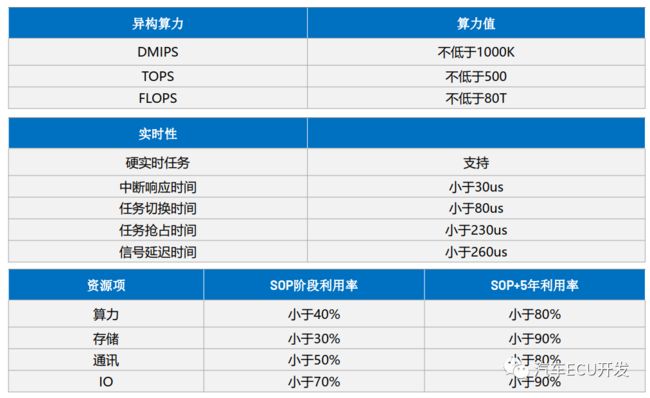
▲图11 CCU内部软件的性能参数
区域控制器主要实现数据和能源网关的功能,实现减少线束、能源智能化管理、控制器软件化,以及实现SOA,软硬件解耦、控制IO虚拟化、服务化。通过若干个区域控制器和CCU实现环网架构。

区域控制器的内部硬件简图如图8所示。从图12来看区域控制器应该是基于域控架构中使用的NXP S32G的迭代,具有高低边开关、E-fuse等控制,在通信方面有8路CAN、6路Lin和2路以太网。
PCIe网关可以满足满足算力芯片之间的实时大数据交互;解决高带宽、低延时的痛点需求,实现任意端到端之间的数据传输带宽在20Gb/s以上,并且具备物理隔离。
TSN网关具备CAN/CANFD/LIN到以太网的双向协议转换功能,可以实现TSN协议中的NC/EE/BE不同优先级数据流转发和数据交换。
除了架构的升级外,在OS自研,软件自研方面,理想也有布局。为了实现对客户的需求进行快速响应,并且可以进行算力资源优化来提升用户体验,另外也是为了抓住软件定义汽车时代的汽车灵魂。

广汽埃安
广汽埃安的下一代电子电气架构名叫星灵电子电气架构,由中央计算机、智能驾驶计算机、信息娱乐计算机三个核心计算机群组,以及四个区域控制器组成,集成了千兆以太网、 5G和信息安全、功能安全等技术。

▲图14 广汽的星灵电子电气架构
从图14可以看出,中央运算单元主要负责动力控制和车身控制,其主控芯片为NXP S32G39,座舱域控制器采用的是高通的8155/8295芯片,智驾域控制器采用的是华为的昇腾 610高性能芯片,算力最高可达 400TOPS。分布于车身前后左右的 4个区域控制器主要负责供电以及执行中央控制单元的指令,中央计算单元与四个区域控制器之间采用以太网连接。

在软件结构方面,星灵架构采用了 SOA 软件架构以取代传统软件架构,以实现组件服务化、原子化和标准化,新增应用模块即可实现新场景。
长城
在2020年,长城汽车开发了GEEP3.0的域控架构,涵盖车身控制、动力底盘、智能座舱、智能驾驶4个域控制器,并且目前已经应用到各个车型上了。
▲图16 长城汽车的EEA架构发展
GEEP 3.0之后是GEEP 4.0,GEEP 4.0将整车软、硬件高度整合,其由中央计算、智能座舱及高阶自动驾驶 3个计算平台,外加 3个区域控制器(左、右、前)。
该架构采用SOA设计理念,开放标准API接口,实现功能可扩展,全面满足用户智能化需求。另外可以支持整车级的OTA升级能力,包含动力底盘系统、影音娱乐系统、车身系统、智能驾驶系统等。
▲图18 GEEP4.0的SOA架构设计概念
GEEP5.0由一个中央大脑( one brain)以及五个区域控制器组成,计划2024 年面世。将实现 100%SOA 化,完成整车标准化软件平台的搭建。
比亚迪
比亚迪最新的E3.0平台上将采用其最新的域控制器架构,其中包括智能动力域、智能车控域、智能座舱域和智能驾驶域四大域控。
▲图20 比亚迪的智能域控架构
智能动力域控制器是指八合一总成的控制器,其整合了整车控制器、电池管理器、电机控制器、车载充电器等。
在智能座舱域,比亚迪自主研发了软硬件解耦的车用操作系统BYD OS,能够实现硬件即插即用,软件跨平台通用;使智能电动汽车常用常新。
上汽零束
全栈1.0电子电气架构搭载在目前上汽旗下高端纯电智能车品牌智己、飞凡车型上,全栈1.0架构共有三个域控制器,即中央计算(车控及数据融合)、智能驾驶、智能座舱,同时还保留了较多的分布式模块。
2021年零束启动全栈3.0架构的研发,进行进一步的集中化,其两个高性能计算单元,即 HPC1和 HPC2来实现智能驾驶、智能座舱、智能计算、智能驾驶备份功能,再加 4个区域控制器, 实现各自不同区域的相关功能。
底层狭义操作系统由异构升级为同构;骨干通信带宽扩容至千兆甚至万兆;支持云、管、端智能车网络安全防护体系,并且可以加速智能车自学习、 自成长和自进化。
▲图23 上汽零束全栈1.0和全栈3.0
总结
以上梳理了国内新势力与传统主机厂最新的电子电气架构,基本都是中央计算单元+区域控制器的架构,但是自信看一下,可以发现,新势力的步子迈的比较大,而传统主机厂还是相对保守,虽然大家都叫中央计算单元加区域控制器架构,但是新势力采用的基本是一个中央计算单元,来融合智能驾驶和智能座舱的功能,而传统主机厂基本是都是中央计算群组,分别为智驾、座舱和车控。
参考文章:
1.探究 | 比亚迪e平台3.0告诉我们为什么电子电气架构如此重要
2.比亚迪发布e平台3.0解读:三电深度进化,全新智能架构
3.长城汽车全新电子电气架构解析,未来智能汽车的样子有了
4.比你想象中的要强 解析小鹏汽车 X-EEA 3.0 电子电气架构
5.演讲资料等