第8章 后处理 MATLAB学习笔记
本篇文章是《通信系统仿真原理与无线应用》这本书的学习笔记,仅作个人学习使用。
文章目录
- 一、正文
-
- 8.1 基本图形方法
-
- 8.1.1 系统实例
- 8.1.2 波形、眼图和散点图
-
- 1. 星座图
- 2. 眼图
- 8.2 估计
-
- 8.2.3 增益、延迟和信噪比
- 二、附录
一、正文
8.1 基本图形方法
8.1.1 系统实例
在编译时出现了一个小问题,我的 .M 文件无法正常打开,显示是不受支持的 MATLAB 代码,后来我重新定义为小写的 .m 文件,问题得到了解决。

当然,另一种解决方案是将函数内容直接写道主函数里面,此处不表。
8.1.2 波形、眼图和散点图
k = menu('pi/4 QPSK Plot Options',...
'Unfiltered pi/4 QPSK Signal Constellation',...
'Unfiltered pi/4 QPSK Eye Diagram',...
'Filtered pi/4 QPSK Signal Constellation',...
'Filtered pi/4 OQPSK Eye Diagram',...
'Unfiltered Direct and Quadrature Signals',...
'Filtered Direct and Quadrature Signals',...
'Exit Program');
这段代码创建了一个菜单,其中包含了7个选项,每个选项对应一个图形的类型。用户可以通过选择不同的选项来查看不同的图形。如果选择“Exit Program”,则程序将退出。
menu函数参数表中的 “…” 有什么用?
在这里,“…” 的作用是让你可以在同一个 menu 函数调用中提供多个选项,而不需要在同一行中输入所有选项。
%
% set direct and quadrature bit streams
%
data = round(rand(1,bits));
dd = data(1:2:bits-1);
qq = data(2:2:bits);
串井转换器交替将(奇序数的)符号分配给同相信道,将其他(偶序数的)符号分配给正交信道,千是有
a ( 1 ) a ( 2 ) a ( 3 ) a ( 4 ) ⋯ a ( k ) ⋯ = d ( 1 ) q ( 1 ) d ( 2 ) q ( 2 ) ⋯ d ( k + 1 2 ) q ( k 2 + 1 ) ⋯ a(1) a(2) a(3) a(4) \cdots a(k) \cdots=d(1) q(1) d(2) q(2) \cdots d\left(\frac{k+1}{2}\right) q\left(\frac{k}{2}+1\right) \cdots a(1)a(2)a(3)a(4)⋯a(k)⋯=d(1)q(1)d(2)q(2)⋯d(2k+1)q(2k+1)⋯
这段代码是用随机数生成一个长度为bits的二进制数据流,并将其分成了直接通道(dd)和象限通道(qq)两个部分。其中dd包含了数据流中的奇数位,qq包含了数据流中的偶数位。这个过程是为了将二进制数据流转换成复数信号,以便进行QPSK调制。
theta(1) = iphase; % set initial phase
thetaout(1:sps) = theta(1)*ones(1,sps);
θ ( k ) = θ ( k − 1 ) + ϕ ( k ) \theta(k)=\theta(k-1)+\phi(k) θ(k)=θ(k−1)+ϕ(k)
for k=2:m
if dd(k) == 1
phi_k = (2*qq(k)-1)*pi/4;
else
phi_k = (2*qq(k)-1)*3*pi/4;
end
theta(k) = phi_k + theta(k-1);
for i=1:sps
j = (k-1)*sps+i;
thetaout(j) = theta(k);
end
end
d = cos(thetaout);
q = sin(thetaout);
这一段代码是有问题的,因为教材P195 说的很清楚,且初始相位定义为 θ ( 0 ) = 0 \theta(0)=0 θ(0)=0。按照上面 MATLAB 代码的写法,dd(1)和qq(1)是永远用不到的。我们知道就好,不影响整体程序的运行“应该”。
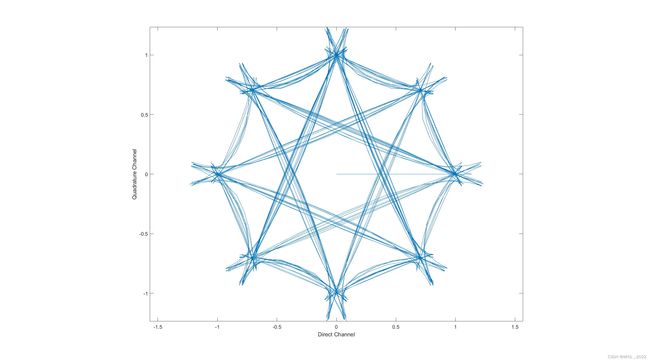
1. 星座图
% File: sigcon.m
% Software given here is to accompany the textbook: W.H. Tranter,
% K.S. Shanmugan, T.S. Rappaport, and K.S. Kosbar, Principles of
% Communication Systems Simulation with Wireless Applications,
% Prentice Hall PTR, 2004.
%
function []=sigcon(x,y)
plot(x,y);
axis('square')
axis('equal')
xlabel('Direct Channel')
ylabel('Quadrature Channel')
end
% End of function file.
x表示同相信号,y表示正交信号。
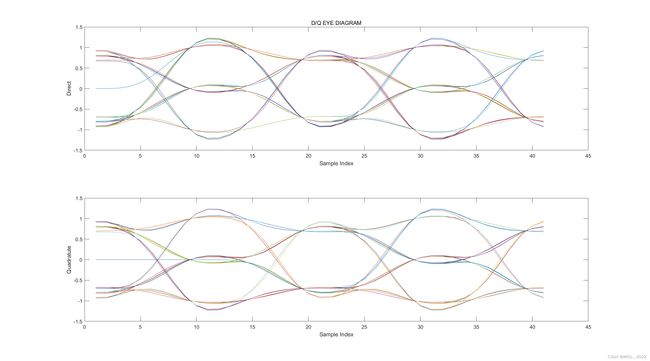
2. 眼图
% File: dqeye.m
% Software given here is to accompany the textbook: W.H. Tranter,
% K.S. Shanmugan, T.S. Rappaport, and K.S. Kosbar, Principles of
% Communication Systems Simulation with Wireless Applications,
% Prentice Hall PTR, 2004.
%
% plot unfiltered eye diagram
%xd是同相信号,xq是正交信号,m在主程序中是4*sps=40
function [] = dqeye(xd,xq,m)
lx = length(xd); % samples in data segment,选取200个symbol,每个symbol取10个点,lx=2000
kcol = floor(lx/m); % number of columns
xda = [0,xd]; xqa = [0,xq]; % append zeros,默认初始相位是0
for j = 1:kcol % column index
for i = 1:(m+1) % row index
kk = (j-1)*m+i; % sample index
y1(i,j) = xda(kk);
y2(i,j) = xqa(kk);
end
end
subplot(211) % direct channel
plot(y1);
title('D/Q EYE DIAGRAM');
xlabel('Sample Index');
ylabel('Direct');
subplot(212) % quadrature channel
plot(y2);
xlabel('Sample Index');
ylabel('Quadratute');
subplot(111) % restore
% End of function file.
对plot(y2); 的一点解释:
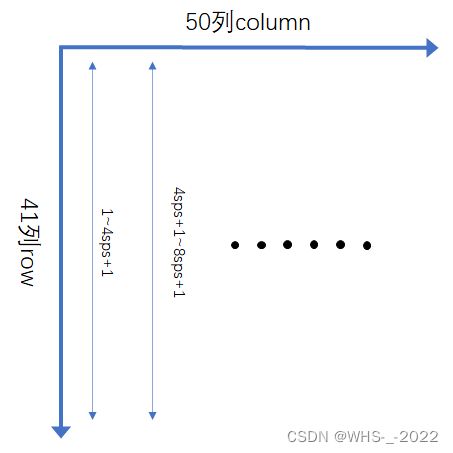
在Matlab中,当使用plot(a)绘制一个矩阵时,Matlab会自动将该矩阵的每一列视为一个向量,并将其绘制在一个单独的坐标系上,横坐标默认为该列在矩阵中的 row 索引,纵坐标则为该列的值。因此,对于一个40*50的矩阵,Matlab会绘制出50条线段,每条线段有40个点,横坐标分别为1到40。
眼图这里的代码有点难以理解,我来做一点解释。
d = cos(thetaout);
q = sin(thetaout);
elseif k ==2
dqeye(d,q,4*sps) % plot unfiltered eye diagram
pause
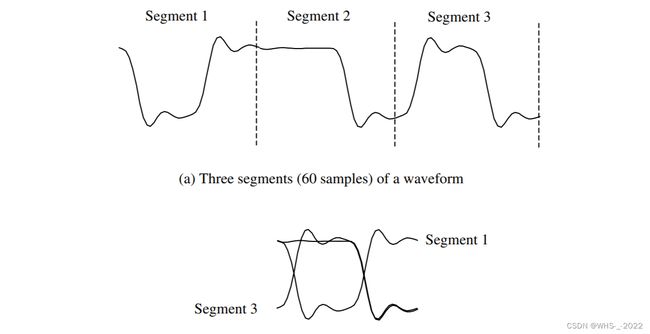
我们通过上面这个代码得到的d和q实际上是 1 × 2000 1\times 2000 1×2000 的向量,选取200个symbol,每个symbol取10个点,lx=2000。那上图中一个 Segment 在程序中我们取 4*sps,如下图示意。
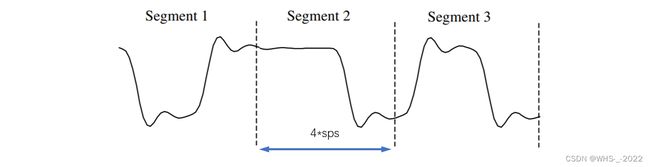
但是如果真的取4*sps画图的话,因为我们这里是模拟仿真,会发现眼图是恰好会重合在一起,为了示意眼图,我们用下面的方式排列矩阵并且绘图,就能得到正确的眼图了。
8.2 估计
8.2.3 增益、延迟和信噪比
实低通信号的理论推导
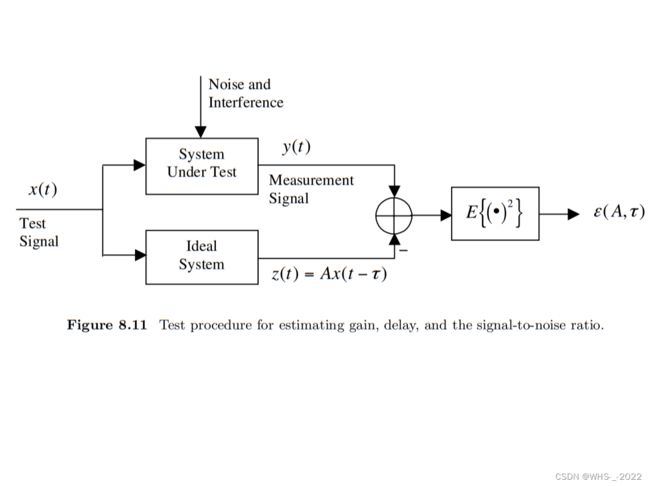
对线性时不变无失真系统,系统中任意点信号 y ( t ) y(t) y(t) 是对输入参考信号 x ( t ) x(t) x(t) 按幅度比例缩放并加入延迟后所得的信号。因此, 我们可以将无失真信号写为:
z ( t ) = A x ( t − τ ) z(t)=A x(t-\tau) z(t)=Ax(t−τ)
其中, A A A 是增益, τ \tau τ 是系统中定义SNR的那个点的群时延。令 x ( t ) x(t) x(t) 为参考信号, y ( t ) y(t) y(t) 为观测信号,于是
y ( t ) = A x ( t − τ ) + n ( t ) + d ( t ) (21) y(t)=A x(t-\tau)+n(t)+d(t)\tag{21} y(t)=Ax(t−τ)+n(t)+d(t)(21)
其中, n ( t ) n(t) n(t) 代表外部加性噪声, d ( t ) d(t) d(t) 是系统引人的跟信号相关的内部失真, 这种内部失真可能由码间千扰或非线性造成。描述系统中不同信号之间关系的方框图如图8-11 所示。
噪声功率定义为 y ( t ) y(t) y(t) 和无失真系统输出 z ( t ) = A x ( t − τ ) z(t) = Ax(t -\tau) z(t)=Ax(t−τ)之间的MSE , 即:
ε ( A , τ ) = E { [ y ( t ) − A x ( t − τ ) ] 2 } \varepsilon(A, \tau)=E\left\{[y(t)-A x(t-\tau)]^{2}\right\} ε(A,τ)=E{[y(t)−Ax(t−τ)]2}
A A A 和 τ \tau τ 理想估计值是最小化 ε ( A , τ ) \varepsilon(A, \tau) ε(A,τ)的值。上述表达式可写为:
ε ( A , τ ) = E { y 2 ( t ) + A 2 x 2 ( t − τ ) − 2 A x ( t − τ ) y ( t ) } (23) \varepsilon(A, \tau)=E\left\{y^{2}(t)+A^{2} x^{2}(t-\tau)-2 A x(t-\tau) y(t)\right\}\tag{23} ε(A,τ)=E{y2(t)+A2x2(t−τ)−2Ax(t−τ)y(t)}(23)
对于平稳信号, 各阶矩独立于时间起点。此外, 和的期望等于期望的和,因此, 方程(8-23)可写为:
ε ( A , τ ) = E { y 2 ( t ) } + A 2 E { x 2 ( t ) } − 2 A E { x ( t ) y ( t + τ ) } (24) \varepsilon(A, \tau)=E\left\{y^{2}(t)\right\}+A^{2} E\left\{x^{2}(t)\right\}-2 A E\{x(t) y(t+\tau)\}\tag{24} ε(A,τ)=E{y2(t)}+A2E{x2(t)}−2AE{x(t)y(t+τ)}(24)
这里的 E { x ( t ) y ( t + τ ) } E\{x(t) y(t+\tau)\} E{x(t)y(t+τ)} 是求得最大的期望相关功率,在仿真时我们选择近似用 x ( t ) x(t) x(t) 的长度来代替时长。
因此,信噪比为
S N = R x y 2 ( τ m ) P x [ P x P x P y − R x y 2 ( τ m ) ] = R x y 2 ( τ m ) P x P y − R x y 2 ( τ m ) (30) \frac{S}{N}=\frac{R_{x y}^{2}\left(\tau_{m}\right)}{P_{x}}\left[\frac{P_{x}}{P_{x} P_{y}-R_{x y}^{2}\left(\tau_{m}\right)}\right]=\frac{R_{x y}^{2}\left(\tau_{m}\right)}{P_{x} P_{y}-R_{x y}^{2}\left(\tau_{m}\right)}\tag{30} NS=PxRxy2(τm)[PxPy−Rxy2(τm)Px]=PxPy−Rxy2(τm)Rxy2(τm)(30)
x ( t ) x(t) x(t) 和 y ( t ) y(t) y(t) 的相关系数 ρ \rho ρ 定义为
ρ = R x y ( τ m ) P x P y (31) \rho=\frac{R_{x y}\left(\tau_{m}\right)}{\sqrt{P_{x} P_{y}}}\tag{31} ρ=PxPyRxy(τm)(31)
根据这个定义,在测量点 y ( t ) y(t) y(t) 处, SNR的表达式很简单:
S N = ρ 2 1 − ρ 2 (32) \frac{S}{N}=\frac{\rho^{2}}{1-\rho^{2}}\tag{32} NS=1−ρ2ρ2(32)
我们都知道圆周卷积有这个公式
y ( n ) = [ ∑ m = 0 L − 1 x 1 ( m ) ∑ r = − ∞ ∞ x 2 ( n + r L − m ) ] R L ( n ) = [ ∑ r = − ∞ ∞ ∑ m = 0 L − 1 x 1 ( m ) x 2 ( n + r L − m ) ] R L ( n ) = [ ∑ r = − ∞ ∞ y l ( n + r L ) ] R L ( n ) \begin{aligned} y(n) & =\left[\sum_{m=0}^{L-1} x_{1}(m) \sum_{r=-\infty}^{\infty} x_{2}(n+r L-m)\right] \mathrm{R}_{\mathrm{L}}(n) \\ & =\left[\sum_{r=-\infty}^{\infty} \sum_{m=0}^{L-1} x_{1}(m) x_{2}(n+r L-m)\right] \mathrm{R}_{L}(n)\\ &=\left[\sum_{r=-\infty}^{\infty} y_{l}(n+r L)\right] R_{L}(n) \end{aligned} y(n)=[m=0∑L−1x1(m)r=−∞∑∞x2(n+rL−m)]RL(n)=[r=−∞∑∞m=0∑L−1x1(m)x2(n+rL−m)]RL(n)=[r=−∞∑∞yl(n+rL)]RL(n)
我们知道圆周卷积有定义
r ˉ x y ( m ) = ∑ n = 0 N − 1 x ( n ) y ( ( n − m ) ) N R N ( m ) = ∑ n = 0 N − 1 x ( n ) y ( ( − ( m − n ) ) ) N R N ( m ) = x ( m ) N ◯ y ( N − m ) \begin{aligned} \bar{r}_{x y}(m) & =\sum_{n=0}^{N-1} x(n) y((n-m))_{N} R_{N}(m) \\ & =\sum_{n=0}^{N-1} x(n) y((-(m-n)))_{N} R_{N}(m)=x(m) \textcircled{N} y(N-m) \end{aligned} rˉxy(m)=n=0∑N−1x(n)y((n−m))NRN(m)=n=0∑N−1x(n)y((−(m−n)))NRN(m)=x(m)N◯y(N−m)
那么必然圆周卷积也是线性相关的平移,即
r ˉ x y ( m ) = ∑ n = 0 N 1 − 1 x ( n ) y ( ( n − m ) ) N R N ( m ) = [ ∑ n = 0 N 1 − 1 x ( n ) ∑ r = − ∞ ∞ y ( n − m + r L ) ] R N ( m ) = [ ∑ r = − ∞ ∞ ∑ n = 0 n = N 1 − 1 x ( n ) y ( n − ( m − r L ) ) ] R N ( m ) = [ ∑ r = − ∞ ∞ r x y ( n − r N ) ] R N ( m ) \begin{aligned} \bar{r}_{x y}(m) & =\sum_{n=0}^{N_1-1} x(n) y((n-m))_{N} R_{N}(m) \\ &=[\sum_{n=0}^{N_1-1} x(n) \sum_{r=-\infty}^{\infty}y(n-m+rL) ]R_{N}(m)\\ &=[\sum_{r=-\infty}^{\infty} \sum_{n=0}^{n=N_1-1}x(n)y(n-(m-rL))]R_{N}(m)\\ &=[\sum_{r=-\infty}^{\infty}r_{xy}(n-r N)] R_{N}(m) \end{aligned} rˉxy(m)=n=0∑N1−1x(n)y((n−m))NRN(m)=[n=0∑N1−1x(n)r=−∞∑∞y(n−m+rL)]RN(m)=[r=−∞∑∞n=0∑n=N1−1x(n)y(n−(m−rL))]RN(m)=[r=−∞∑∞rxy(n−rN)]RN(m)
其中, r x y ( n ) = x ( n ) ∗ y ( − n ) r_{xy}(n)=x(n)*y(-n) rxy(n)=x(n)∗y(−n) 是线性相关。
% File: snrmse.m
% Software given here is to accompany the textbook: W.H. Tranter,
% K.S. Shanmugan, T.S. Rappaport, and K.S. Kosbar, Principles of
% Communication Systems Simulation with Wireless Applications,
% Prentice Hall PTR, 2004.
%
function [gain,delay,px,py,rxy,rho,snrdb] = snrmse(x,y)
ln = length(x); % Set length of the reference (x) vector
fx = fft(x,ln); % FFT the reference (x) vector
fy = fft(y,ln); % FFT the measurement (y) vector
fxconj = conj(fx); % Conjugate the FFT of the reference vector
sxy = fy .* fxconj; % Determine the cross PSD
rxy = ifft(sxy,ln); % Determine the cross correlation function
rxy = real(rxy)/ln; % Take the real part and scale
px = x*x'/ln; % Determine power in reference vector
py = y*y'/ln; % Determine power in measurement vector
[rxymax,j] = max(rxy); % Find the max of the crosscorrelation
gain = rxymax/px; % Here's the gain
delay = j-1; % Here's the delay
rxy2 = rxymax*rxymax; % Square rxymax for later use
rho = rxymax/sqrt(px*py); % Here's the correlation coefficient
snr = rxy2/(px*py-rxy2); % Here's the snr
snrdb = 10*log10(snr); % Here's the snr in db
% End of script file.
这个MATLAB代码是很有问题的,我来解释一下。x 是输入参考信号 x ( t ) x(t) x(t) , y ( t ) y(t) y(t) 为观测信号。
正常来说我们想要用 FFT 做线性相关必须要先补零,但是这里没有补零,那么我们直接用
ln = length(x);的信号会得到什么?
没错,我们得到的实际上是循环卷积。
那么为什么结果依然还是基本上没有问题的呢?如下图

其实问题出在 z ( t ) = A x ( t − τ ) z(t)=A x(t-\tau) z(t)=Ax(t−τ) 上,这里 τ \tau τ 其实是非常小的,我们从下文可以知道 τ \tau τ 是 64,其实是非常小的,相较于信号的长度来看。我们来看我们直接得到的信号是什么。
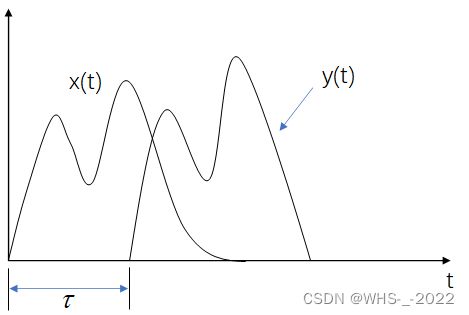

可以看到, m = − 64 m=-64 m=−64 的时候会取到相关系数的最大值,此时 m m m 较大值处的影响是比较小的,可以近似的认为这就是 r x y r_{xy} rxy 的值。
此外还有一点,这里取实部是没有必要的,因为实函数的相关函数必然也是个实数。
%在输入x和y都是实数的情况下,相关函数rxy必定是实数,这里是没有必要的
rxy = ifft(sxy,ln); % Determine the cross correlation function
rxy = real(rxy)/ln; % Take the real part and scale
% isreal(rxy)
% ans =
%
% logical
%
% 1
%
二、附录
r ˉ x y ( m ) = ∑ n = 0 N 1 − 1 x ( n ) y ( ( n − m ) ) N R N ( m ) = [ ∑ n = 0 N 1 − 1 x ( n ) ∑ r = − ∞ ∞ y ( n − m + r L ) ] R N ( m ) = [ ∑ r = − ∞ ∞ ∑ n = 0 n = N 1 − 1 x ( n ) y ( n − ( m − r L ) ) ] R N ( m ) = [ ∑ r = − ∞ ∞ r x y ( n − r N ) ] R N ( m ) \begin{aligned} \bar{r}_{x y}(m) & =\sum_{n=0}^{N_1-1} x(n) y((n-m))_{N} R_{N}(m) \\ &=[\sum_{n=0}^{N_1-1} x(n) \sum_{r=-\infty}^{\infty}y(n-m+rL) ]R_{N}(m)\\ &=[\sum_{r=-\infty}^{\infty} \sum_{n=0}^{n=N_1-1}x(n)y(n-(m-rL))]R_{N}(m)\\ &=[\sum_{r=-\infty}^{\infty}r_{xy}(n-r N)] R_{N}(m) \end{aligned} rˉxy(m)=n=0∑N1−1x(n)y((n−m))NRN(m)=[n=0∑N1−1x(n)r=−∞∑∞y(n−m+rL)]RN(m)=[r=−∞∑∞n=0∑n=N1−1x(n)y(n−(m−rL))]RN(m)=[r=−∞∑∞rxy(n−rN)]RN(m)
为了验算圆周相关是线性相关的平移,我花了很多时间来验证这个公式,代码分享给大家。
% 验算圆周相关
L=4;
x=[1,1,5,7];y=[2,2,3,7];
% 直接用卷积的方法求相关函数
corr=xcorr(x,y)
%用FFT的方法求相关函数
lnx = length(x);
lny = length(y);
fx = fft(x,lnx+lny-1); % FFT the reference (x) vector
fy = fft(y,lny+lnx-1); % FFT the measurement (y) vector
fyconj = conj(fy);
sxy = fx .* fyconj;
rxy = ifft(sxy,lnx+lny-1); %计算出来的恰好以 lnx+lny-1 为长度的圆周相关
%需要将FFT得到的相关函数向右位移Ny-1个单位,得到的rxy第一个值的下标是和线性相关一致
rxy=circshift(rxy,lny-1)
rxy_1=[rxy,zeros(1,L)]%补零,为平移相加做准备
%接下来求圆周相关结果
rxy_2=[zeros(1,L),rxy(1:end)]%向右移动
rxy_3=rxy_1+rxy_2
RXY=rxy_3(lny:1:lny+L-1)%圆周相关取主值
%%
%接下来我们直接以圆周相关周期L,用FFT计算圆周相关
ln = length(L); % Set length of the reference (x) vector
fx = fft(x,L); % FFT the reference (x) vector
fy = fft(y,L); % FFT the measurement (y) vector
fyconj = conj(fy); % Conjugate the FFT of the reference vector
sxy = fx .* fyconj; % Determine the cross PSD
rxy2 = ifft(sxy,L) % Determine the cross correlation function