光追渲染器开发记录:BVH加速结构构建与射线求交
目录
为什么需要加速:
BVH概念:
BVH的一个节点:
轴对称包围盒AABB:
BVH的构建:
核心思想:
求取最大的包围盒:
BVH求交:
包围盒求交:
基本思想:
平面求交:
具体做法:
具体的物体求交:
三角面求交:
基本思想:
球体求交:
方法一:
方法二:
学习资料:
上一篇:光追渲染器开发记录:基础渲染架构/线程池/泛型单例_This is MX的博客-CSDN博客 https://blog.csdn.net/m0_56399931/article/details/123977009
https://blog.csdn.net/m0_56399931/article/details/123977009
为什么需要加速:
当我们场景中有大量物体的时候,每根射线都要和每个物体求交的消耗是非常昂贵的,我们需要对求交这个过程进行加速,加速方法通常分为空间划分,物体划分。空间划分有八叉树、KDTree,BSPTree,物体划分有BVH、SAH等。
我们选择最常用的BVH来构建加速结构。
BVH概念:
BVH的一个节点:
BVH主要根据物体的包围盒进行划分,构建二叉树,每个树的节点至少包括左子树指针、右子树指针、包围盒,叶子节点还会包含具体的物体。
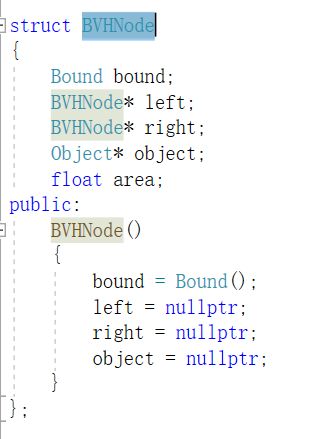
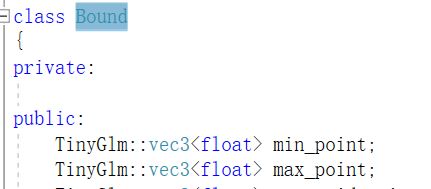
轴对称包围盒AABB:
我们的包围盒采用轴对称包围盒,一个轴对称包围盒的定义,可以使用两个vec3,记录最大值Vec_max,最小值Vec_min,然后根据排列组合可以求出包围盒的八个点。

BVH的构建:
我们构建一棵树的时候通常是递归构建的,这里我们也采用递归构建的方法。

核心思想:
①每次我们找出物体列表的最大的包围盒
②然后每次我们找到最长的轴
③根据最长的轴进行排序二分划分,构建左右节点,重复①②③过程
④如果只剩下一个物体则构建叶子节点
⑤如果只剩下两个物体则构建左右叶子节点
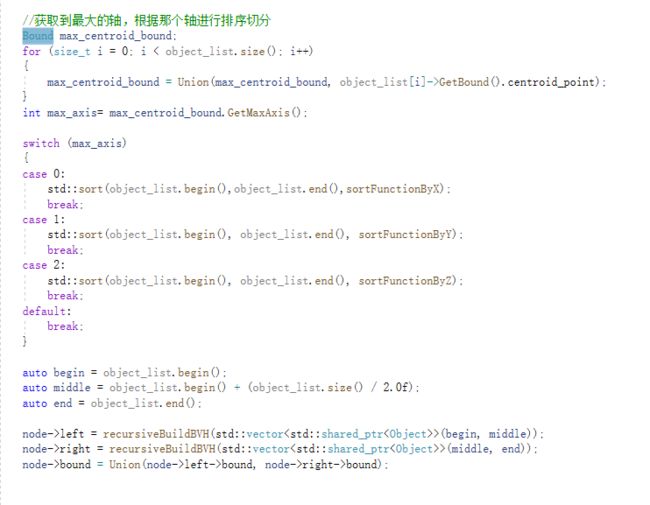
求取最大的包围盒:
对于包围盒的列表,更新每个轴的最大最小,然后更新Vec_max(maxX,maxY,maxZ),更新Vec_min(minX,minY,minZ)

BVH求交:

包围盒求交:
基本思想:
我们先看射线的定义 ray=origin + time *direction 简写为 ray= o +td;
平面的点法表达式子 (arbitrary point- fixed point)· normal=0 ,简写为 (x - p)· n =0,其中x为未知点,p为平面上任意选取的一点,n为法线。
包围盒求交其实就是利用射线与平面的相交,分别求取xyz三个轴的t_min ,t_max,t_min=max(t_min_list),t_max=min(t_max_list)

我们先看平面求交
平面求交:
其实就是把射线方程带入平面方程
(o+td -p)*n=0
t=(p-o)/d
具体做法:
看到t=(p-o)/d,我们发现这个其实和normal没有关系,那么如果我们选取p为Vec_max,我们就能求取到三个面的射线相交时间,选取p为Vec_min,我们就能求取到另外三个面的射线相交时间。然后我们再取一下min,max,就能获取到射出t,射入t。

具体的物体求交:
三角面求交:
基本思想:
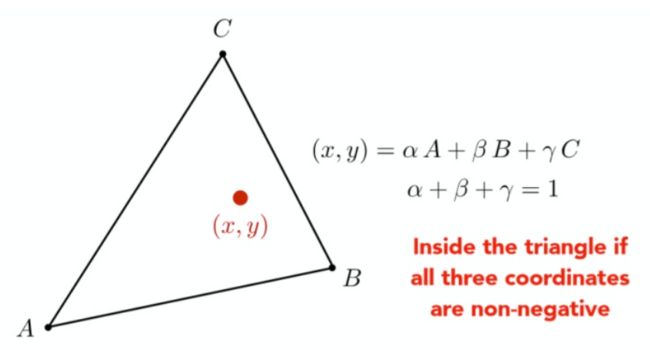
我们先求取射线和平面的交点,然后判断交点是否在三角形内。射线平面求交就是上面的算法,三角形求交,可以采用重心插值公式。
重心插值公式的判断三角形内部点如下
但是我们这么判断其实得计算两个算法,那我们联合一下两个算法求解,这就是Moller-Trumbore算法

我们假设:

根据线性代数只是,可以求出
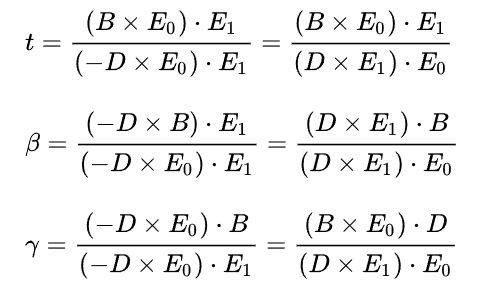
一个点在三角形内有如下约束

这里粘一下我games作业的代码

球体求交:
球体求交有两个方法,一个是根据方程求解,一个根据数学的射线与球心距离求解
我们这里写一个球体的方程(P-C)^2=R^2,核心思想是球体表面点到圆心的距离永远是半径
方法一:
方程求解:
我们可以将射线方程带入球体方程,观察是否有解,(o+td-c)^2=R^2,展开我们使用判别式判断,如果有交点求出解

方法二:
根据数学的射线与球心距离求解:
我们首先判断射线原点到球心的距离如果小于半径肯定有交点;进一步我们求射线原点到球中心在射线上的投影距离,如果小于0,表明球心在射线原点以及方向背后,没有交点;再进一步,求取球中心到射线的垂直距离平方,如果大于半径肯定没有交点;如果要求t,则再进一步根据勾股定理求取射线与球体两个交点之间的距离,利用投影距离加减算一下就可以求出t。至此求解完成。


学习资料:
Ray Tracing: in One Weekend
Ray Tracing: The Next Week
games101
1.射线与球的相交测试 - 知乎
2.射线与三角形相交 Moller-Trumbore - 知乎
3.【光线追踪系列十】光追加速结构(BVH树)_沉默的舞台剧的博客-CSDN博客_bvh树