Go|Channel 底层实现和运行调度逻辑
文章目录
-
- 1、Channel 与 CSP并发模型
-
- Channel
- 2、Channel 底层结构
- 3、Channel 运行逻辑
-
- 创建 channel
- 发送数据
- 接收数据
- 发送/接收操作细节
- goroutine 阻塞唤醒与调度
1、Channel 与 CSP并发模型
CSP(Communicating Sequential Process)通信顺序进程,是一种很强大的并发数据模型,用于描述两个独立的并发实体通过共享的通讯 channel(管道)进行通信的并发模型。
Golang 其实只用到了 CSP 的很小一部分,即理论中的 Process/Channel(对应到语言中的 goroutine/channel):这两个并发原语之间没有从属关系, Process 可以订阅任意个 Channel,Channel 也并不关心是哪个 Process 在利用它进行通信;Process 围绕 Channel 进行读写,形成一套有序阻塞和可预测的并发模型。
DO NOT COMMUNICATE BY SHARING MEMORY; INSTEAD, SHARE MEMORY BY COMMUNICATING.
不要以共享内存的方式来通信,而要通过通信来共享内存。
无论是通过共享内存来通信还是通过通信来共享内存,最终我们应用程序都是读取的内存当中的数据,只是前者是直接读取内存的数据,而后者是通过发送消息的方式来进行同步。
大部分的语言采用的都是第一种方式直接去操作内存,然后通过互斥锁,CAS 等操作来保证并发安全。共享内存的方式在高并发场景下的锁竞争激烈,开销大。采用channel进行通信可以控制并发的数量,可以使得生产者和消费者解耦,提高代码可读性。Go的CSP并发模型,是通过goroutine和channel来实现的。
Go中的channel 是一个队列,遵循先进先出的原则,负责协程之间的通信。Channel 其实和消息队列很相似。
Go 的 GMP 协程调度模型不展开讲,可以查看之前的博客。
Channel
channel 使用场景:
- 停止信号监听
- 定时任务
- 生产方和消费方解耦
- 控制并发数
channel有3种状态:未初始化、正常、关闭
| 状态 | 未初始化 | 关闭 | 正常 |
|---|---|---|---|
| 关闭 | panic | panic | 正常关闭 |
| 发送 | 阻塞 | panic | 阻塞或者成功发送 |
| 接收 | 阻塞 | 缓冲区为空则为零值, 否则可以继续读 | 阻塞或者成功接收 |
- 一个 channel不能多次关闭,会导致painc
- 如果多个 goroutine 都监听同一个 channel,那么 channel 上的数据都可能随机被某一个 goroutine 取走进行消费
- 如果多个 goroutine 监听同一个 channel,如果这个 channel 被关闭,则所有 goroutine 都能收到退出信号
channel死锁场景:
- 非缓存channel只写不读
- 非缓存channel读在写后面
- 缓存channel写入超过缓冲区数量
- 空读
- 多个协程互相等待
2、Channel 底层结构
channel 变量是一个存储在函数栈帧上的指针,占用8个字节,指向堆上的 hchan 结构体。
type hchan struct {
closed uint32 // channel是否关闭的标志
elemtype *_type // channel中的元素类型
// channel分为无缓冲和有缓冲两种。
// 对于有缓冲的channel存储数据,使用了 ring buffer(环形缓冲区) 来缓存写入的数据,本质是循环数组
// 为啥是循环数组?普通数组不行吗,普通数组容量固定更适合指定的空间,弹出元素时,普通数组需要全部都前移
// 当下标超过数组容量后会回到第一个位置,所以需要有两个字段记录当前读和写的下标位置
buf unsafe.Pointer // 指向底层循环数组的指针(环形缓冲区)
qcount uint // 循环数组中的元素数量
dataqsiz uint // 循环数组的长度
elemsize uint16 // 元素的大小
sendx uint // 下一次写下标的位置
recvx uint // 下一次读下标的位置
// 尝试读取channel或向channel写入数据而被阻塞的goroutine
recvq waitq // 读等待队列
sendq waitq // 写等待队列
lock mutex //互斥锁,保证读写channel时不存在并发竞争问题
}
对于有缓冲的channel存储数据,使用了 ring buffer(环形缓冲区) 来缓存写入的数据,本质是循环数组。环形缓存的内存空间可以复用,减少了GC的压力。
环形缓存由hchan的五个字段构成。qcout是环形缓存中已经保存数据的多少,dataqsize表示的是最多能缓存多少数据,buf是一个指向环形缓存第一个成员的指针,elemsize和elemtype是缓存数据的大小和类型。
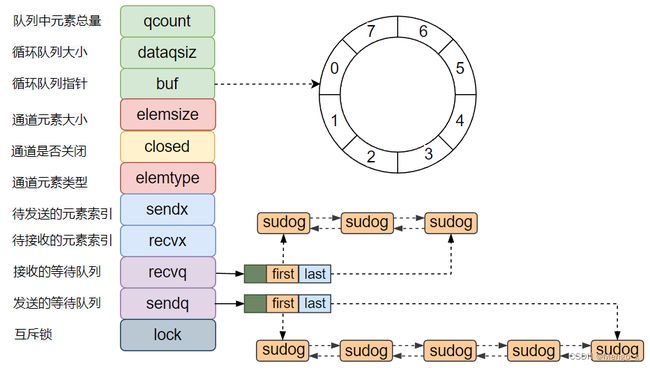
channel中含有两个队列分别是:接收队列 recvq 和发送队列 sendq。其底层结构为双向链表 waitq,包含一个头结点和一个尾结点。每个节点是一个sudog结构体变量,记录哪个协程 g 在等待,等待的是哪个 hchan,等待发送/接收的数据 elem 在哪里。
sudog代表着等待队列中的一个goroutine,G与同步对象(指chan)关系是多对多的。一个 G 可以出现在许多等待队列上,因此一个 G 可能有多个sudog。并且多个 G 可能正在等待同一个同步对象,因此一个对象可能有许多 sudog。sudog 是从特殊池中分配出来的。使用 acquireSudog 和 releaseSudog 分配和释放它们。
type waitq struct {
first *sudog
last *sudog
}
type sudog struct {
g *g
next *sudog
prev *sudog
elem unsafe.Pointer
c *hchan
...
}
3、Channel 运行逻辑
此部分源码解析可参考这篇博客
阻塞唤醒调度示例可参考这篇博客
创建 channel
// 带缓冲
ch := make(chan int, 3)
// 不带缓冲
ch := make(chan int)
创建时的策略:
- 如果是无缓冲的 channel,会直接在堆上给
hchan分配内存; - 如果是有缓冲的 channel,并且元素不包含指针,那么会在堆上为
hchan和底层buf数组分配一段连续的地址; - 如果是有缓冲的 channel,并且元素包含指针,那么会在堆上为
hchan和底层buf数组分别分配地址;
当存储在
buf中的元素不包含指针时,hchan中也不包含 GC 关心的指针。buf指向一段相同元素类型的内存,elemtype固定不变。受到垃圾回收器的限制,指针类型的缓冲buf需要单独分配内存。
创建channel实际上就是在堆内存中实例化了一个hchan的结构体,并返回一个ch指针,我们使用过程中channel在函数之间的传递都是用的这个指针,这就是为什么函数传递中无需使用channel的指针,而直接用channel就行了。
发送数据
向 channel 中发送数据时大概分为两大块:检查和数据发送
- 如果 channel 的读等待队列
recvq存在接收者goroutine- 将数据直接发送给第一个等待的 goroutine(将数据拷贝到了接收者的内存地址上), 唤醒接收的 goroutine(将等待接收的阻塞 goroutine 的状态从 Gwaiting 或者 Gscanwaiting 改变成 Grunnable)
- 如果 channel 的读等待队列
recvq不存在接收者goroutine- 如果循环数组buf未满,那么将会把数据发送到循环数组
buf的队尾(需要给buf** 加锁**) - 如果循环数组buf已满,这个时候就会走阻塞发送的流程,将当前 goroutine 加入写等待队列
sendq,并挂起等待唤醒
- 如果循环数组buf未满,那么将会把数据发送到循环数组
接收数据
向 channel 中接收数据时大概分为两大块,检查和数据接收
- 如果 channel 的写等待队列
sendq存在发送者goroutine- 如果是无缓冲 channel,直接从第一个发送者goroutine那里把数据拷贝给接收变量,唤醒发送的 goroutine
- 如果是有缓冲 channel(已满),将循环数组buf的队首元素拷贝给接收变量,将第一个发送者goroutine的数据拷贝到 buf循环数组队尾,唤醒发送的 goroutine
- 如果 channel 的写等待队列
sendq不存在发送者goroutine- 如果循环数组buf非空,将循环数组buf的队首元素拷贝给接收变量
- 如果循环数组buf为空,这个时候就会走阻塞接收的流程,将当前 goroutine 加入读等待队列
recvq,并挂起等待唤醒
发送/接收操作细节
缓存链表如果要使用 buf,每一步的操作,都是需要加锁的,每一步的操作的细节可以细化为:
- 第一,加锁
- 第二,把数据从goroutine中copy到“队列”中(或者从队列中copy到goroutine中)。
- 第三,释放锁
Go中那句经典的话:Do not communicate by sharing memory; instead, share memory by communicating.的具体实现就是利用channel把数据从一个G copy到了另一个 G。
goroutine 阻塞唤醒与调度
当channel缓存满了,或者没有缓存的时候,我们继续 send(ch <- xxx) 或者 recv(<- ch) 会阻塞当前goroutine。这里就是 Go 运行时的 scheduler 完成的调度,具体的 GMP 调度模型可以看以前的博客。
goroutine的阻塞操作,实际上是调用 send (ch <- xx)或者 recv ( <-ch) 的时候主动触发的。
以发送为例,G1 协程执行以下操作,导致 channel 已经满了。
//goroutine1 中,记做G1
ch := make(chan int, 3)
ch <- 1
ch <- 1
ch <- 1
再次进行send操作 (ch<-1) 的时候,会主动调用Go的调度器,让G1等待并让出M,让其他G去使用。
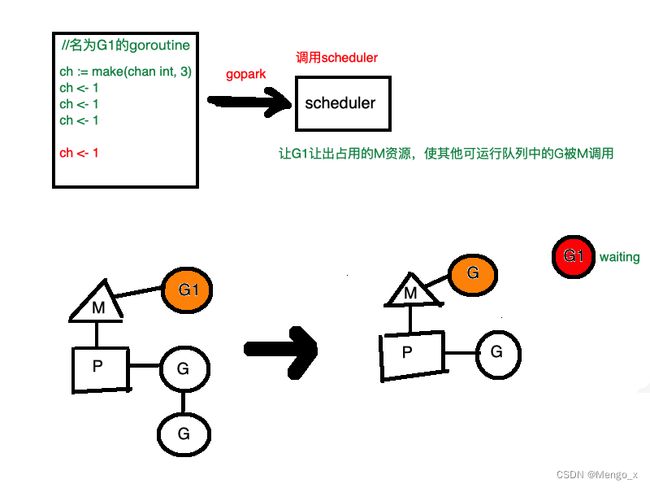
同时G1也会被抽象成含有G1指针和send元素的sudog结构体保存到hchan的sendq中等待被唤醒。
随后 G2 执行了recv操作 p := <-ch,G2从缓存队列中取出数据,channel会将等待队列 sendq 中的G1推出,将G1 要发送的数据推到缓存中,然后调用Go的scheduler,唤醒G1,并把G1放到 P 可运行的 Goroutine 队列中。
如果是 G2 在接收数据时被阻塞,加入recvq 等待唤醒。然后 G1 发送了数据,此时不需要经过 buf 队列,而是直接把数据从G1直接copy到了G2的栈中,然后调度器唤醒 G2,无需获取锁。