Linux进程信号
信号
-
-
-
- 1. 信号概念
- 2. 信号的产生
-
- 2.1 硬件产生
-
- 2.1.1 ctrl+c:SIGINT(2)
- 2.1.2 ctrl+z:SIGTSTP(20)
- 2.1.3 ctrl+\:SIGQUIT(3)
- 2.2 软件产生
-
- 2.2.1 kill命令
- 2.2.2 kill函数
- 2.2.3 abort函数
- 3. 信号的注册
-
- 3.1 位图加sigqueue队列
- 3.2 非可靠信号的注册
- 3.3 可靠信号的注册
- 4. 信号的注销
-
- 4.1 非可靠信号的注销
- 4.2 可靠信号的注销
- 5. 信号的处理
-
- 5.1 SIG_DFL:默认处理方式
-
- SIGCHILD信号
- 5.2 SIG_IGN:忽略处理
- 5.3 自定义信号处理函数
-
- 5.3.1 signal函数
- 5.3.2 sigaction函数
- 6. 信号捕捉
- 7. 信号阻塞
-
- 7.1 概念
- 7.2 阻塞函数sigprocmask
- 8. volatile关键字
-
-
1. 信号概念
-
信号是进程之间事件异步通知的一种方式,属于软件中断
-
信号的种类:
- 1~31:非可靠信号,信号有可能会丢失
- 34~64:可靠信号,信号是不可能丢失的
-
用 kill -l 命令可以查看系统定义的信号列表

每个信号都有一个编号和一个宏定义,这些信号各自在什么条件下产生,默认的处理动作,可以使用命令man 7 signal 查看。

2. 信号的产生
2.1 硬件产生
通过终端按键产生信号
2.1.1 ctrl+c:SIGINT(2)
- 默认处理动作是终止进程
- ctrl+c 产生的信号只能发给前台进程。一个命令后面加个&可以将进程放到后台运行,使用fg可以将刚刚放到后台的进程重新放到前台来运行,这样shell不必等待进程结束就可以接受新的命令,启动新的进程。

可以看到将进程放到后台运行,是接收不到 ctrl+c 信号的,但是终端可以接受其他的命令,再将进程调到前台运行时,就可以接受到信号了。 - shell可以同时运行一个前台进程和任意多个后台进程,只有前台进程才能接收到ctrl+c 这种信号。
2.1.2 ctrl+z:SIGTSTP(20)
- 默认处理动作是停止前台进程,只能手动唤醒,尽量不要使用
2.1.3 ctrl+\:SIGQUIT(3)
-
默认处理动作是终止进程并且Core Dump

-
Core Dump:
- 当一个进程异常终止时,可以选择把进程的用户空间内存数据全部保存在磁盘上,文件名通常是core,这就叫Core Dump。
- 进程异常终止通常是有bug,比如非法内存访问导致段错误,事后可以用调试器检查core文件已查看错误原因,这叫做事后调试。
- 一个进程允许产生多大的core文件,取决于进程的Resource Limit(这个信息保存在PCB中)。默认不允许产生core文件,因为core文件中可能包含用户密码等敏感信息,不安全。
- 解引用空指针、内存访问越界,进程就会收到11号信号(SIGSEGV),导致进程coredump,或者double free(多次释放同一块内存),进程会收到6号信号(SIGABRT),导致当前进程退出,产生coredump。
- 可以使用命令 ulimit -c 1024 改变core文件大小,这只是临时生效的,想要永久生效,将命令写进 ~/.bash_profile 文件中并使之生效。

2.2 软件产生
2.2.1 kill命令
kill -[信号] 进程pid
例:在后台运行一个死循环进程,然后在另一个终端发送终止信号

可以看到进程也被终止了。
2.2.2 kill函数
int kill(pid_t pid, int sig)
函数说明:
- pid:要给哪一个进程发送信号
- sig:要发送的具体信号值(可以直接传数字,也可以传宏定义)
代码示例:
#include 运行结果:
[test@localhost signal_test1]$ ./signal_test2
[test@localhost signal_test1]$
可以看到并没有打印,而是直接被终止了。
同样的除了kill函数给指定进程发送信号外,raise函数可以给当前进程发送指定的信号(即自己给自己发送信号)
2.2.3 abort函数
void abort(void)
说明:
- abort函数是当前进程收到信号而异常终止
- abort函数如同exit函数,总是会成功
- 其实是封装了kill函数,相当于kill(getpid(),6)。
例:

3. 信号的注册
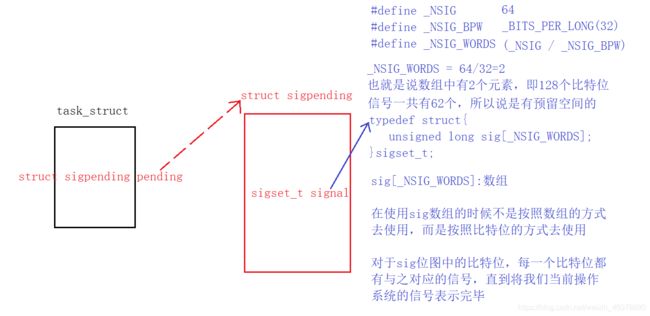
3.1 位图加sigqueue队列
位图:
sigqueue队列:
- 用于添加sigqueue节点到sigqueue队列中,或者将节点出队
3.2 非可靠信号的注册
当进程收到一个非可靠信号:
- 将非可靠信号对应的比特位更改为1
- 添加sigqueue节点到sigqueue队列当中
但是,如果在添加sigqueue节点时,队列中已经有了该信号的sigqueue节点,则不添加。
3.3 可靠信号的注册
当进程收到一个可靠信号:
- 在sig位图中将该信号对应的比特位更改为1
- 不论之前sigqueue队列当中是否存在该信号的sigqueue节点,都再次添加sigqueue节点到sigqueue队列当中。
4. 信号的注销
4.1 非可靠信号的注销
- 将该信号的sigqueue节点从sigqueue队列当中进行出队操作
- 信号在sig位图中对应的比特位由1置为0
4.2 可靠信号的注销
-
将该信号的sigqueue节点从sigqueue队列当中进行出队操作
-
需要判断sigqueue队列当中是否还有相同的sigqueue节点
- 没有:将信号在sig位图中对应的比特位由1置为0
- 还存在:不会将sig位图中对应的比特位由1置为0
5. 信号的处理
5.1 SIG_DFL:默认处理方式
收到信号,采取默认的处理方式
SIGCHILD信号
- 在进程控制中,子进程先于父进程退出,会想父进程发送一个SIGCHILD信号,该信号默认处理动作是忽略,没有处理导致子进程成为僵尸进程。
- 使用wait 和 waitpid 函数可以等待子进程退出,采用wait,父进程会阻塞等待子进程退出,使用waitpid需要循环处理,所以需要自定义SIGCHILD信号的处理函数。
代码示例:
#include 运行结果:
可以看到,在wait success之后,子进程没有成为僵尸进程
5.2 SIG_IGN:忽略处理
收到信号,不去处理
5.3 自定义信号处理函数
自定义处理函数是对9号信号没有用的
图示:

5.3.1 signal函数
可以更改信号的处理动作
函数:
typedef void (*sighandler_t)(int)
sighandler_t signal(int signum, sighandler_t handler)
代码示例:
#include 运行结果:

5.3.2 sigaction函数
可以更改信号的处理动作
函数:
- int sigaction(int signum, const struct sigaction *act,struct sigaction *oldact)
- int sigemptyset(sigset_t *set):将比特位清零
函数说明:
-
signum:待更改的信号的值
-
struct sigaction:
- void (*sa_handler)(int):函数指针,保存了内核对信号的处理方式
- void (* sa_sigaction) (int,siginfo_t*,void*)
- sigset_t sa_mask:保存的是当进程在处理信号的时候,收到的信号
- int sa_flags:SA_SIGINFO,操作系统在处理信号的时候,调用的就是sa_sigaction函数指针当中保存的值0,在处理信号的时候,调用sa_handler保存的函数
- void (*sa_restorer)(void):预留信息
-
act:将信号处理之前改变为act
-
oldact:信号之前的处理方式
代码示例:
#include 运行结果:

6. 信号捕捉
调用系统调用函数的时候,或者调用库函数的时候(库函数大多数都是封装系统调用的函数的),会进入到内核空间
流程图示:

- 如果没有信号处理,那就是1、2、6
- 如果有信号处理,就是1、2、3、4、5、6
7. 信号阻塞
7.1 概念
相较于sig位图,阻塞是一个block位图
- 信号的阻塞,并不会干扰信号的注册,信号该注册还是注册,只不过当前的进程不能立即处理
- 当我们将block位图当中对应信号比特位置为1,表示当前进程阻塞该信号,当进程收到该信号,进程还是一如既往的对该信号进行注册
- 当进程进入到内核空间,准备返回用户空间的时候,调用do_signal函数,不会立即去处理信号,一定不是之后不处理。
- 被阻塞的信号产生时将保持在未决状态,直到进程解除对此信号的阻塞,才执行递达的动作.
- 注意,阻塞和忽略是不同的,只要信号被阻塞就不会递达,而忽略是在递达之后可选的一种处理动作。
7.2 阻塞函数sigprocmask
函数:
int sigprocmask(int how, const sigset_t *set, sigset_t *oldset)
函数说明:
-
how:告诉sigprocmask函数应该做什么操作
- SIG_BLOCK:设置某个信号为阻塞
- SIG_UNBLOCK:解除对某个信号的阻塞
- SIG_SETMASK:替换阻塞位图
-
set:用来设置阻塞位图
- SIG_BLOCK:设置某个信号为阻塞
block(new) = block(old) | set - SIG_UNBLOCK:解除对某个信号的阻塞
block(new) = block(old) & (~set) - SIG_SETMASK:替换阻塞位图
block(new) = set
- SIG_BLOCK:设置某个信号为阻塞
-
oldset:原来的阻塞位图
代码示例:
- 对2号信号阻塞:
#include 运行结果:
可以看到,在其他终端发送了2号信号后,信号被阻塞了,进程没有被终止,在按回车后,进程立即终止了,也就是说,阻塞并没有干扰信号的注册。
- 对比非可靠信号和可靠信号的处理
#include 运行结果:

可以看到分别发送可靠信号和非可靠信号各5次,可靠信号被处理了5次,而非可靠信号只处理了1次。这也就验证了不论之前sigqueue队列当中是否存在该信号的sigqueue节点,都再次添加sigqueue节点到sigqueue队列当中
8. volatile关键字
- 保持内存的可见性,告知编译器,被该关键字修饰的变量,不允许被优化,对该变量的任何操作,都必须在真实的内存中进行操作
代码示例:
#include -
不使用volatile关键字
- 正常情况下:

- 编译优化后:

- 正常情况下:
-
使用volatile关键字

即不允许被优化,保持内存的可见性。