一、FreeRTOS简介
FreeRTOS 是一个可裁剪、可剥夺型的多任务内核,而且没有任务数限制。FreeRTOS 提供了实时操作系统所需的所有功能,包括资源管理、同步、任务通信等。
FreeRTOS 是用 C 和汇编来写的,其中绝大部分都是用 C 语言编写的,只有极少数的与处理器密切相关的部分代码才是用汇编写的,FreeRTOS 结构简洁,可读性很强!最主要的是非常适合初次接触嵌入式实时操作系统学生、嵌入式系统开发人员和爱好者学习。
最新版本 V9.0.0(2016年),尽管现在 FreeRTOS 的版本已经更新到 V10.4.1 了,但是我们还是选择 V9.0.0,因为内核很稳定,并且网上资料很多,因为 V10.0.0 版本之后是亚马逊收购了FreeRTOS之后才出来的版本,主要添加了一些云端组件,一般采用 V9.0.0 版本足以。
- FreeRTOS官网:http://www.freertos.org/
- 代码托管网站:https://sourceforge.net/projects/freertos/files/FreeRTOS/
二、新建工程
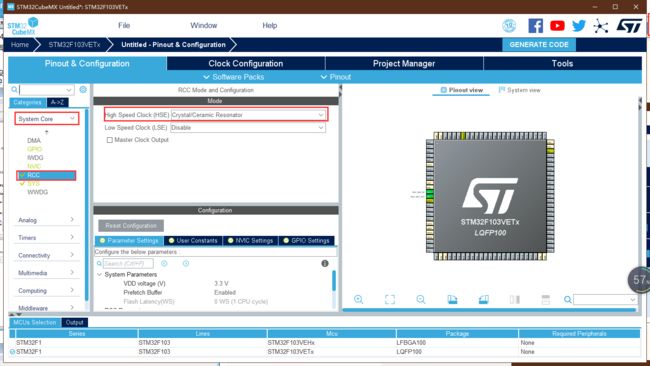
1. 打开 STM32CubeMX 软件,点击“新建工程”

2. 选择 MCU 和封装

3. 配置时钟
RCC 设置,选择 HSE(外部高速时钟) 为 Crystal/Ceramic Resonator(晶振/陶瓷谐振器)
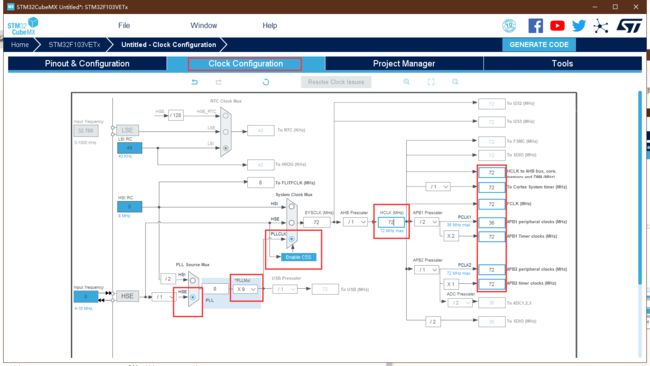
选择 Clock Configuration,配置系统时钟 SYSCLK 为 72MHz
修改 HCLK 的值为 72 后,输入回车,软件会自动修改所有配置
4. 配置调试模式
非常重要的一步,否则会造成第一次烧录程序后续无法识别调试器
SYS 设置,选择 Debug 为 Serial Wire

三、SYS Timebase Source
在 System Core 中选择 SYS ,对 Timebase Source 进行设置,选择 TIM1 作为HAL库的时基(除了 SysTick 外都可以)。
在基于STM32 HAL的项目中,一般需要维护的 “时基” 主要有2个:
- HAL的时基,SYS Timebase Source
- OS的时基(仅在使用OS的情况下才考虑)
而这些 “时基” 该去如何维护,主要分为两种情况考虑:
裸机运行:
可以通过SysTick(滴答定时器)或 (TIMx)定时器 的方式来维护SYS Timebase Source,也就是HAL库中的uwTick,这是HAL库中维护的一个全局变量。在裸机运行的情况下,我们一般选择默认的SysTick(滴答定时器) 方式即可,也就是直接放在SysTick_Handler()中断服务函数中来维护。-
带OS运行:
前面提到的SYS Timebase Source是STM32的HAL库中的新增部分,主要用于实现HAL_Delay()以及作为各种 timeout 的时钟基准。在使用了OS(操作系统)之后,OS的运行也需要一个时钟基准(简称“时基”),来对任务和时间等进行管理。而OS的这个 时基 一般也都是通过
SysTick(滴答定时器) 来维护的,这时就需要考虑 “HAL的时基” 和 “OS的时基” 是否要共用SysTick(滴答定时器) 了。如果共用SysTick,当我们在CubeMX中选择启用FreeRTOS之后,在生成代码时,CubeMX一定会报如下提示:
强烈建议用户在使用FreeRTOS的时候,不要使用
SysTick(滴答定时器)作为 “HAL的时基”,因为FreeRTOS要用,最好是要换一个!!!如果共用,潜在一定风险。
四、FreeRTOS
4.1 参数配置
在 Middleware 中选择 FREERTOS 设置,并选择 CMSIS_V1 接口版本
CMSIS是一种接口标准,目的是屏蔽软硬件差异以提高软件的兼容性。RTOS v1使得软件能够在不同的实时操作系统下运行(屏蔽不同RTOS提供的API的差别),而RTOS v2则是拓展了RTOS v1,兼容更多的CPU架构和实时操作系统。因此我们在使用时可以根据实际情况选择,如果学习过程中使用STM32F1、F4等单片机时没必要选择RTOS v2,更高的兼容性背后时更加冗余的代码,理解起来比较困难。
在 Config parameters 进行具体参数配置。
Kernel settings:
- USE_PREEMPTION:
Enabled:RTOS使用抢占式调度器;Disabled:RTOS使用协作式调度器(时间片)。 - TICK_RATE_HZ: 值设置为
1000,即周期就是1ms。RTOS系统节拍中断的频率,单位为HZ。 - MAX_PRIORITIES: 可使用的最大优先级数量。设置好以后任务就可以使用从0到(MAX_PRIORITIES - 1)的优先级,其中0位最低优先级,(MAX_PRIORITIES - 1)为最高优先级。
- MINIMAL_STACK_SIZE: 设置空闲任务的最小任务堆栈大小,以字为单位,而不是字节。如该值设置为
128Words,那么真正的堆栈大小就是 128*4 = 512 Byte。 - MAX_TASK_NAME_LEN: 设置任务名最大长度。
- IDLE_SHOULD_YIELD:
Enabled空闲任务放弃CPU使用权给其他同优先级的用户任务。 - USE_MUTEXES: 为1时使用互斥信号量,相关的API函数会被编译。
- USE_RECURSIVE_MUTEXES: 为1时使用递归互斥信号量,相关的API函数会被编译。
- USE_COUNTING_SEMAPHORES: 为1时启用计数型信号量, 相关的API函数会被编译。
- QUEUE_REGISTRY_SIZE: 设置可以注册的队列和信号量的最大数量,在使用内核调试器查看信号量和队列的时候需要设置此宏,而且要先将消息队列和信号量进行注册,只有注册了的队列和信号量才会在内核调试器中看到,如果不使用内核调试器的话次宏设置为0即可。
- USE_APPLICATION_TASK_TAG: 为1时可以使用vTaskSetApplicationTaskTag函数。
- ENABLE_BACKWARD_COMPATIBILITY: 为1时可以使V8.0.0之前的FreeRTOS用户代码直接升级到V8.0.0之后,而不需要做任何修改。
- USE_PORT_OPTIMISED_TASK_SELECTION: FreeRTOS有两种方法来选择下一个要运行的任务,一个是通用的方法,另外一个是特殊的方法,也就是硬件方法,使用MCU自带的硬件指令来实现。STM32有计算前导零指令吗,所以这里强制置1。
- USE_TICKLESS_IDLE: 置1:使能低功耗tickless模式;置0:保持系统节拍(tick)中断一直运行。假设开启低功耗的话可能会导致下载出现问题,因为程序在睡眠中,可用ISP下载办法解决。
- USE_TASK_NOTIFICATIONS: 为1时使用任务通知功能,相关的API函数会被编译。开启了此功能,每个任务会多消耗8个字节。
- RECORD_STACK_HIGH_ADDRESS: 为1时栈开始地址会被保存到每个任务的TCB中(假如栈是向下生长的)。
Memory management settings:
- Memory Allocation:
Dynamic/Static支持动态/静态内存申请 - TOTAL_HEAP_SIZE: 设置堆大小,如果使用了动态内存管理,FreeRTOS在创建 task, queue, mutex, software timer or semaphore的时候就会使用heap_x.c(x为1~5)中的内存申请函数来申请内存。这些内存就是从堆ucHeap[configTOTAL_HEAP_SIZE]中申请的。
- Memory Management scheme: 内存管理策略
heap_4。
Hook function related definitions:
- USE_IDLE_HOOK: 置1:使用空闲钩子(Idle Hook类似于回调函数);置0:忽略空闲钩子。
- USE_TICK_HOOK: 置1:使用时间片钩子(Tick Hook);置0:忽略时间片钩子。
- USE_MALLOC_FAILED_HOOK: 使用内存申请失败钩子函数。
- CHECK_FOR_STACK_OVERFLOW: 大于0时启用堆栈溢出检测功能,如果使用此功能用户必须提供一个栈溢出钩子函数,如果使用的话此值可以为1或者2,因为有两种栈溢出检测方法。
Run time and task stats gathering related definitions:
- GENERATE_RUN_TIME_STATS: 启用运行时间统计功能。
- USE_TRACE_FACILITY: 启用可视化跟踪调试。
- USE_STATS_FORMATTING_FUNCTIONS: 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数prvWriteNameToBuffer()、vTaskList()、vTaskGetRunTimeStats()。
Co-routine related definitions:
- USE_CO_ROUTINES: 启用协程。
- MAX_CO_ROUTINE_PRIORITIES: 协程的有效优先级数目。
Software timer definitions:
- USE_TIMERS: 启用软件定时器。
Interrupt nesting behaviour configuration:
- LIBRARY_LOWEST_INTERRUPT_PRIORITY: 中断最低优先级。
- LIBRARY_LOWEST_INTERRUPT_PRIORITY: 系统可管理的最高中断优先级。
4.2 创建队列Queue
在 Tasks and Queues 进行配置。
创建一个消息队列TestQueue,
- Queue Name: 队列名称
- Queue Size: 队列能够存储的最大单元数目,即队列深度
- Queue Size: 队列中数据单元的长度,以字节为单位
- Allocation: 分配方式:
Dynamic动态内存创建 - Buffer Name: 缓冲区名称
- Buffer Size: 缓冲区大小
- Conrol Block Name: 控制块名称
4.3 创建任务Task
我们创建两个任务,一个消息接收任务,一个消息发送任务。
- Task Name: 任务名称
- Priority: 优先级,在 FreeRTOS 中,数值越大优先级越高,0 代表最低优先级
- Stack Size (Words): 堆栈大小,单位为字,在32位处理器(STM32),一个字等于4字节,如果传入512那么任务大小为512*4字节
- Entry Function: 入口函数
- Code Generation Option: 代码生成选项
- Parameter: 任务入口函数形参,不用的时候配置为0或NULL即可
- Allocation: 分配方式:
Dynamic动态内存创建 - Buffer Name: 缓冲区名称
- Conrol Block Name: 控制块名称
4.4 创建二值信号量Binary Semaphore
在 Timers and Semaphores 进行配置。
- Semaphore Name: 信号量名称
- Allocation: 分配方式:
Dynamic动态内存创建 - Conrol Block Name: 控制块名称
五、EXTI外部中断
5.1 参数配置
在 System Core 中选择 GPIO 设置。
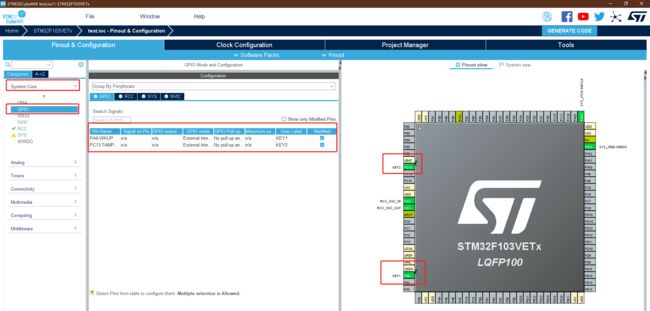
在右边图中找到按键对应引脚,选择
GPIO_EXTIx。
这里的
x 是指挂载在中断线几上,如 GPIO_EXTI0 就是挂载在中断线0上。

- 开启下降沿触发中断:即在 按下按键时 电平由高变为低时触发,则在
GPIO mode中选择External Interrupt Mode with Falling edge trigger detection - 开启上升沿触发中断:即在 按下按键后松开时 电平由低变为高时触发,则在
GPIO mode中选择External Interrupt Mode with Rising edge trigger detection - 开启下降沿上升沿都触发中断:即在 按下时触发,松开时再次触发,则在
GPIO mode中选择External Interrupt Mode with Rising/Falling edge trigger detection
- 如果硬件上已外部上拉或下拉,则在
GPIO Pull-up/Pull-down中选择No pull-up and no pull-down既不上拉也不下拉。 - 如果硬件外部没有上拉,则在
GPIO Pull-up/Pull-down中选择Pull-up内部上拉电阻。

配置NVIC
中断优先级分组规则Priority Group默认为4个比特位,一般情况下不改。
勾选刚刚配置的外部中断线0和13,并配置抢占优先级Preemption Priority和响应优先级Sub Priority。在 FreeRTOS 中,优先级最低为5。
六、UART串口打印
查看 STM32CubeMX学习笔记(6)——USART串口使用
七、生成代码
输入项目名和项目路径
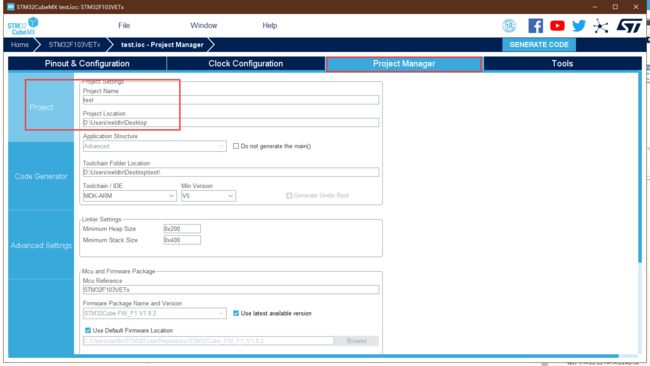
选择应用的 IDE 开发环境 MDK-ARM V5
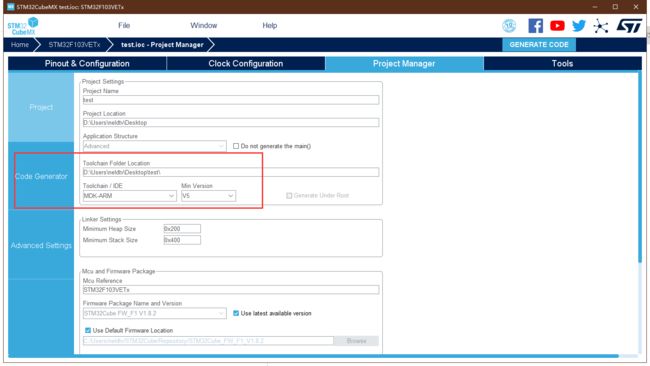
每个外设生成独立的
’.c/.h’ 文件
不勾:所有初始化代码都生成在 main.c
勾选:初始化代码生成在对应的外设文件。 如 GPIO 初始化代码生成在 gpio.c 中。
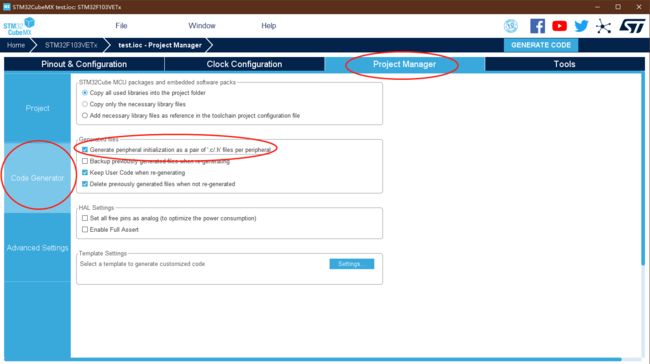
点击 GENERATE CODE 生成代码

八、中断管理
8.1 基本概念
8.1.1 异常
异常是导致处理器脱离正常运行转向执行特殊代码的任何事件,如果不及时进行处理,轻则系统出错,重则会导致系统毁灭性瘫痪。所以正确地处理异常,避免错误的发生是提高软件鲁棒性(稳定性)非常重要的一环,对于实时系统更是如此。
异常是指任何打断处理器正常执行,并且迫使处理器进入一个由有特权的特殊指令执行的事件。异常通常可以分成两类:同步异常和异步异常。由内部事件(像处理器指令运行产生的事件)引起的异常称为同步异常,例如造成被零除的算术运算引发一个异常,又如在某些处理器体系结构中,对于确定的数据尺寸必须从内存的偶数地址进行读和写操作。从一个奇数内存地址的读或写操作将引起存储器存取一个错误事件并引起一个异常(称为校准异常)。
异步异常主要是指由于外部异常源产生的异常,是一个由外部硬件装置产生的事件引起的异步异常。同步异常不同于异步异常的地方是事件的来源,同步异常事件是由于执行某些指令而从处理器内部产生的,而异步异常事件的来源是外部硬件装置。例如按下设备某个按钮产生的事件。同步异常与异步异常的区别还在于,同步异常触发后,系统必须立刻进行处理而不能够依然执行原有的程序指令步骤;而异步异常则可以延缓处理甚至是忽略,例如按键中断异常,虽然中断异常触发了,但是系统可以忽略它继续运行(同样也忽略了相应的按键事件)。
8.1.2 中断
中断,中断属于异步异常。所谓中断是指中央处理器 CPU 正在处理某件事的时候,外部发生了某一事件,请求 CPU 迅速处理,CPU 暂时中断当前的工作,转入处理所发生的事件,处理完后,再回到原来被中断的地方,继续原来的工作,这样的过程称为中断。
中断能打断任务的运行,无论该任务具有什么样的优先级,因此中断一般用于处理比较紧急的事件,而且只做简单处理,例如标记该事件,在使用 FreeRTOS 系统时,一般建议使用信号量、消息或事件标志组等标志中断的发生,将这些内核对象发布给处理任务,处理任务再做具体处理。
通过中断机制,在外设不需要 CPU 介入时,CPU 可以执行其他任务,而当外设需要 CPU 时通过产生中断信号使 CPU 立即停止当前任务转而来响应中断请求。这样可以使 CPU 避免把大量时间耗费在等待、查询外设状态的操作上,因此将大大提高系统实时性以及执行效率。
此处读者要知道一点,FreeRTOS 源码中有许多处临界段的地方,临界段虽然保护了关键代码的执行不被打断,但也会影响系统的实时,任何使用了操作系统的中断响应都不会比裸机快。比如,某个时候有一个任务在运行中,并且该任务部分程序将中断屏蔽掉,也就是进入临界段中,这个时候如果有一个紧急的中断事件被触发,这个中断就会被挂起,不能得到及时响应,必须等到中断开启才可以得到响应,如果屏蔽中断时间超过了紧急中断能够容忍的限度,危害是可想而知的。所以,操作系统的中断在某些时候会有适当的中断延迟,因此调用中断屏蔽函数进入临界段的时候,也需快进快出。当然 FreeRTOS 也能允许一些高优先级的中断不被屏蔽掉,能够及时做出响应,不过这些中断就不受系统管理,也不允许调用 FreeRTOS 中与中断相关的任何 API 函数接口。
FreeRTOS 的中断管理支持:
- 开/关中断。
- 恢复中断。
- 中断使能。
- 中断屏蔽。
- 可选择系统管理的中断优先级。
1.3 中断延迟
即使操作系统的响应很快了,但对于中断的处理仍然存在着中断延迟响应的问题,我们称之为中断延迟(Interrupt Latency) 。
中断延迟是指从硬件中断发生到开始执行中断处理程序第一条指令之间的这段时间。也就是:系统接收到中断信号到操作系统作出响应,并完成换到转入中断服务程序的时间。也可以简单地理解为:(外部)硬件(设备)发生中断,到系统执行中断服务子程序(ISR)的第一条指令的时间。
中断的处理过程是:外界硬件发生了中断后,CPU 到中断处理器读取中断向量,并且查找中断向量表,找到对应的中断服务子程序(ISR)的首地址,然后跳转到对应的 ISR 去做相应处理。这部分时间,我称之为:识别中断时间。
在允许中断嵌套的实时操作系统中,中断也是基于优先级的,允许高优先级中断抢断正在处理的低优先级中断,所以,如果当前正在处理更高优先级的中断,即使此时有低优先级的中断,也系统不会立刻响应,而是等到高优先级的中断处理完之后,才会响应。而即使在不支持中断嵌套,即中断是没有优先级的,中断是不允许被中断的,所以,如果当前系统正在处理一个中断,而此时另一个中断到来了,系统也是不会立即响应的,而只是等处理完当前的中断之后,才会处理后来的中断。此部分时间,我称其为:等待中断打开时间。
在操作系统中,很多时候我们会主动进入临界段,系统不允许当前状态被中断打断,故而在临界区发生的中断会被挂起,直到退出临界段时候打开中断。此部分时间,我称其为:关闭中断时间。
中断延迟可以定义为,从中断开始的时刻到中断服务例程开始执行的时刻之间的时间段。中断延迟 = 识别中断时间 + [等待中断打开时间] + [关闭中断时间]。
注意:“[ ]”的时间是不一定都存在的,此处为最大可能的中断延迟时间。
8.2 运作机制
当中断产生时,处理机将按如下的顺序执行:
- 保存当前处理机状态信息
- 载入异常或中断处理函数到 PC 寄存器
- 把控制权转交给处理函数并开始执行
- 当处理函数执行完成时,恢复处理器状态信息
- 从异常或中断中返回到前一个程序执行点
中断使得 CPU 可以在事件发生时才给予处理,而不必让 CPU 连续不断地查询是否有相应的事件发生。通过两条特殊指令:关中断和开中断可以让处理器不响应或响应中断,在关闭中断期间,通常处理器会把新产生的中断挂起,当中断打开时立刻进行响应,所以会有适当的延时响应中断,故用户在进入临界区的时候应快进快出。中断发生的环境有两种情况:在任务的上下文中,在中断服务函数处理上下文中。
- 任务在工作的时候,如果此时发生了一个中断,无论中断的优先级是多大,都会打断当前任务的执行,从而转到对应的中断服务函数中执行。
- 在执行中断服务例程的过程中,如果有更高优先级别的中断源触发中断,由于当前处于中断处理上下文环境中,根据不同的处理器构架可能有不同的处理方式,比如新的中断等待挂起直到当前中断处理离开后再行响应;或新的高优先级中断打断当前中断处理过程,而去直接响应这个更高优先级的新中断源。后面这种情况,称之为中断嵌套。在硬实时环境中,前一种情况是不允许发生的,不能使响应中断的时间尽量的短。而在软件处理(软实时环境)上,FreeRTOS 允许中断嵌套,即在一个中断服务例程期间,处理器可以响应另外一个优先级更高的中断。
8.3 FreeRTOS中断管理
ARM Cortex-M 系列内核的中断是由硬件管理的,而 FreeRTOS 是软件,它并不接管由硬件管理的相关中断(接管简单来说就是,所有的中断都由 RTOS 的软件管理,硬件来了中断时,由软件决定是否响应,可以挂起中断,延迟响应或者不响应),只支持简单的开关中断等,所以 FreeRTOS 中的中断使用其实跟裸机差不多的,需要我们自己配置中断,并且使能中断,编写中断服务函数,在中断服务函数中使用内核 IPC 通信机制,一般建议使用信号量、消息或事件标志组等标志事件的发生,将事件发布给处理任务,等退出中断后再由相关处理任务具体处理中断。
用户可以自定义配置 系统可管理的最高中断优 先 级 的宏定义 configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY ,它是用于配置内核中的 basepri 寄存器的,当 basepri 设置为某个值的时候,NVIC 不会响应比该优先级低的中断,而优先级比之更高的中断则不受影响。就是说当这个宏定义配置为 5 的时候,中断优先级数值在 0、1、2、3、4 的这些中断是不受 FreeRTOS 屏蔽的,也就是说即使在系统进入临界段的时候,这些中断也能被触发而不是等到退出临界段的时候才被触发,当然,这些中断服务函数中也不能调用 FreeRTOS 提供的 API 函数接口,而中断优先级在 5 到 15 的这些中断是可以被屏蔽的,也能安全调用 FreeRTOS 提供的 API 函数接口。
ARM Cortex-M NVIC 支持中断嵌套功能:当一个中断触发并且系统进行响应时,处理器硬件会将当前运行的部分上下文寄存器自动压入中断栈中,这部分的寄存器包括 PSR,R0,R1,R2,R3 以及 R12 寄存器。当系统正在服务一个中断时,如果有一个更高优先级的中断触发,那么处理器同样的会打断当前运行的中断服务例程,然后把老的中断服务例程上下文的 PSR,R0,R1,R2,R3 和 R12 寄存器自动保存到中断栈中。这些部分上下文寄存器保存到中断栈的行为完全是硬件行为,这一点是与其他 ARM 处理器最大的区别(以往都需要依赖于软件保存上下文)。
另外,在 ARM Cortex-M 系列处理器上,所有中断都采用中断向量表的方式进行处理,即当一个中断触发时,处理器将直接判定是哪个中断源,然后直接跳转到相应的固定位置进行处理。而在 ARM7、ARM9 中,一般是先跳转进入 IRQ 入口,然后再由软件进行判断是哪个中断源触发,获得了相对应的中断服务例程入口地址后,再进行后续的中断处理。ARM7、ARM9 的好处在于,所有中断它们都有统一的入口地址,便于 OS 的统一管理。而 ARM Cortex-M 系列处理器则恰恰相反,每个中断服务例程必须排列在一起放在统一的地址上(这个地址必须要设置到 NVIC 的中断向量偏移寄存器中)。中断向量表一般由一个数组定义(或在起始代码中给出),在 STM32 上,默认采用起始代码给出:
__Vectors DCD __initial_sp ; Top of Stack DCD Reset_Handler ; Reset Handler DCD NMI_Handler ; NMI Handler DCD HardFault_Handler ; Hard Fault Handler DCD MemManage_Handler ; MPU Fault Handler DCD BusFault_Handler ; Bus Fault Handler DCD UsageFault_Handler ; Usage Fault Handler DCD 0 ; Reserved DCD 0 ; Reserved DCD 0 ; Reserved DCD 0 ; Reserved DCD SVC_Handler ; SVCall Handler DCD DebugMon_Handler ; Debug Monitor Handler DCD 0 ; Reserved DCD PendSV_Handler ; PendSV Handler DCD SysTick_Handler ; SysTick Handler ; External Interrupts DCD WWDG_IRQHandler ; Window Watchdog DCD PVD_IRQHandler ; PVD through EXTI Line detect DCD TAMPER_IRQHandler ; Tamper DCD RTC_IRQHandler ; RTC DCD FLASH_IRQHandler ; Flash DCD RCC_IRQHandler ; RCC DCD EXTI0_IRQHandler ; EXTI Line 0 DCD EXTI1_IRQHandler ; EXTI Line 1 DCD EXTI2_IRQHandler ; EXTI Line 2 DCD EXTI3_IRQHandler ; EXTI Line 3 DCD EXTI4_IRQHandler ; EXTI Line 4 DCD DMA1_Channel1_IRQHandler ; DMA1 Channel 1 DCD DMA1_Channel2_IRQHandler ; DMA1 Channel 2 DCD DMA1_Channel3_IRQHandler ; DMA1 Channel 3 DCD DMA1_Channel4_IRQHandler ; DMA1 Channel 4 DCD DMA1_Channel5_IRQHandler ; DMA1 Channel 5 DCD DMA1_Channel6_IRQHandler ; DMA1 Channel 6 DCD DMA1_Channel7_IRQHandler ; DMA1 Channel 7 ………FreeRTOS 在 Cortex-M 系列处理器上也遵循与裸机中断一致的方法,当用户需要使用自定义的中断服务例程时,只需要定义相同名称的函数覆盖弱化符号即可。所以,FreeRTOS 在 Cortex-M 系列处理器的中断控制其实与裸机没什么差别。
8.4 FreeRTOS开关中断
FreeRTOS开关中断函数为portENABLE_INTERRUPTS()和portDISABLE_INTERRUPTS(),这两个函数其实是宏定义,在portmacro.h中有定义,如下:
#define portDISABLE_INTERRUPTS() vPortRaiseBASEPRI()
#define portENABLE_INTERRUPTS() vPortSetBASEPRI(0)
函数vPortBASEPRI()传递了一个0,这就对应了上面说到的,开启中断是将0写入BASEPRI寄存器。
8.5 临界区
CMSIS-RTOS没有临界区,但FreeRTOS与临界段代码保护有关的函数有4个:
taskENTER_CRITICAL()、
和
taskEXIT_CRITICAL()、taskENTER_CRITICAL_FROM_ISR()、taskEXIT_CRITICAL_FROM_ISR(),这四个函数其实是宏定义,在task.h文件中有定义。这四个函数的区别是前两个是任务级的临界段代码保护,后两个是中断级的临界段代码保护。所以必要时要是加上。
8.5.1 任务级临界段代码保护
taskENTER_CRITICAL()和taskEXIT_CRITICAL()是任务级的临界代码保护,一个是进入临界段,一个是退出临界段,这两个函数是成对使用的,这函数的定义如下:
#define taskENTER_CRITICAL() portENTER_CRITICAL()
#define taskEXIT_CRITICAL() portEXIT_CRITICAL()
而portENTER_CRITICAL()和portEXIT_CRITICAL()也是宏定义,在文件 portmacro.h中有定义。
任务级临界代码保护使用方法如下:
void CriticalTask_TEST(void const * argv)
{
taskENTER_CRITICAL(); //进入临界区
total_num += 0.01f;
printf("total_num 的值为: %.4f\r\n",total_num);
taskEXIT_CRITICAL(); //退出临界区
vTaskDelay(1000);
}
当进入临界区时,中断被屏蔽,临界区代码无法被打断,只有当所有的临界段代码都退出以后才会使能中断!
注:当进入临界区时,优先级低于configMAX_SYSCALL_INTERRUPT_PRIORITY 的中断得不到及响应,所以临界区代码一定要精简。
8.5.2 中断级临界段代码保护
函数taskENTER_CRITICAL_FROM_ISR()和taskEXIT_CRITICAL_FROM_ISR()中断级别临界段代码保护,是用在中断服务程序中的,而且这个中断的优先级一定要低于configMAX_SYSCALL_INTERRUPT_PRIORITY。这两个函数在文件task.h中有如下定义:
#define taskENTER_CRITICAL_FROM_ISR() portSET_INTERRUPT_MASK_FROM_ISR()
#define taskEXIT_CRITICAL_FROM_ISR(x) portCLEAR_INTERRUPT_MASK_FROM_ISR(x)
中断级临界代码保护使用方法如下:
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET) //溢出中断
{
status_value=taskENTER_CRITICAL_FROM_ISR(); //进入临界区
total_num += 1;
printf("float_num 的值为: %d\r\n",total_num);
taskEXIT_CRITICAL_FROM_ISR(status_value); //退出临界区
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除中断标志位
}
九、示例
9.1 中断管理实验
中断管理实验是在 FreeRTOS 中创建了两个任务分别获取信号量与消息队列,并且定义了两个按键 KEY1 与 KEY2 的触发方式为中断触发,其触发的中断服务函数则跟裸机一样,在中断触发的时候通过消息队列将消息传递给任务,任务接收到消息就将信息通过串口调试助手显示出来。而且中断管理实验也实现了一个串口的 DMA 传输+空闲中断功能,当串口接收完不定长的数据之后产生一个空闲中断,在中断中将信号量传递给任务,任务在收到信号量的时候将串口的数据读取出来并且在串口调试助手中回显。
修改main.c
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include
#include
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define BUFFER_SIZE 256
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart1;
DMA_HandleTypeDef hdma_usart1_rx;
DMA_HandleTypeDef hdma_usart1_tx;
osThreadId defaultTaskHandle;
osThreadId ReceiveHandle;
osThreadId SendHandle;
osMessageQId TestQueueHandle;
osSemaphoreId BinarySemHandle;
/* USER CODE BEGIN PV */
uint8_t recvBuff[BUFFER_SIZE]; //接收数据缓存数组
volatile uint8_t recvLength = 0; //接收一帧数据的长度
volatile uint8_t recvDndFlag = 0; //一帧数据接收完成标志
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_USART1_UART_Init(void);
void StartDefaultTask(void const * argument);
void ReceiveTask(void const * argument);
void SendTask(void const * argument);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); //使能IDLE中断
HAL_UART_Receive_DMA(&huart1, recvBuff, BUFFER_SIZE);
/* USER CODE END 2 */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* Create the semaphores(s) */
/* definition and creation of BinarySem */
osSemaphoreDef(BinarySem);
BinarySemHandle = osSemaphoreCreate(osSemaphore(BinarySem), 1);
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* Create the queue(s) */
/* definition and creation of TestQueue */
osMessageQDef(TestQueue, 16, uint32_t);
TestQueueHandle = osMessageCreate(osMessageQ(TestQueue), NULL);
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* definition and creation of Receive */
osThreadDef(Receive, ReceiveTask, osPriorityIdle, 0, 128);
ReceiveHandle = osThreadCreate(osThread(Receive), NULL);
/* definition and creation of Send */
osThreadDef(Send, SendTask, osPriorityIdle, 0, 128);
SendHandle = osThreadCreate(osThread(Send), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
/* Start scheduler */
osKernelStart();
/* We should never get here as control is now taken by the scheduler */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA interrupt init */
/* DMA1_Channel4_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel4_IRQn, 5, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel4_IRQn);
/* DMA1_Channel5_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel5_IRQn, 5, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel5_IRQn);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, LED_G_Pin|LED_B_Pin|LED_R_Pin, GPIO_PIN_SET);
/*Configure GPIO pin : KEY2_Pin */
GPIO_InitStruct.Pin = KEY2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(KEY2_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : KEY1_Pin */
GPIO_InitStruct.Pin = KEY1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(KEY1_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : LED_G_Pin LED_B_Pin LED_R_Pin */
GPIO_InitStruct.Pin = LED_G_Pin|LED_B_Pin|LED_R_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI0_IRQn, 5, 0);
HAL_NVIC_EnableIRQ(EXTI0_IRQn);
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 5, 0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
}
/* USER CODE BEGIN 4 */
/**
* @brief 重定向c库函数printf到USARTx
* @retval None
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* @brief 重定向c库函数getchar,scanf到USARTx
* @retval None
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
/* USER CODE END 4 */
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the defaultTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN 5 */
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END 5 */
}
/* USER CODE BEGIN Header_ReceiveTask */
/**
* @brief Function implementing the Receive thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_ReceiveTask */
void ReceiveTask(void const * argument)
{
/* USER CODE BEGIN ReceiveTask */
osEvent event;
/* Infinite loop */
for(;;)
{
event = osMessageGet(TestQueueHandle, /* 消息队列的句柄 */
osWaitForever); /* 等待时间 一直等 */
if(osEventMessage == event.status)
{
printf("interrupt Key:%d\n\n", event.value.v);
}
else
{
printf("error: 0x%d\n", event.status);
}
}
/* USER CODE END ReceiveTask */
}
/* USER CODE BEGIN Header_SendTask */
/**
* @brief Function implementing the Send thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_SendTask */
void SendTask(void const * argument)
{
/* USER CODE BEGIN SendTask */
osStatus xReturn = osErrorValue;
/* Infinite loop */
for(;;)
{
// 获取二值信号量 xSemaphore,没获取到则一直等待
xReturn = osSemaphoreWait(BinarySemHandle, /* 二值信号量句柄 */
osWaitForever); /* 等待时间 */
if(osOK == xReturn)
{
printf("receive data:%s\n", recvBuff);
memset(recvBuff, 0, BUFFER_SIZE); /* 清零 */
}
}
/* USER CODE END SendTask */
}
/**
* @brief Period elapsed callback in non blocking mode
* @note This function is called when TIM1 interrupt took place, inside
* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment
* a global variable "uwTick" used as application time base.
* @param htim : TIM handle
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* USER CODE BEGIN Callback 0 */
/* USER CODE END Callback 0 */
if (htim->Instance == TIM1) {
HAL_IncTick();
}
/* USER CODE BEGIN Callback 1 */
/* USER CODE END Callback 1 */
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
修改stm32f1xx_it.c
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "cmsis_os.h"
#include
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
#define BUFFER_SIZE 256
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
static uint32_t send_data1 = 1;
static uint32_t send_data2 = 2;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern DMA_HandleTypeDef hdma_usart1_rx;
extern DMA_HandleTypeDef hdma_usart1_tx;
extern UART_HandleTypeDef huart1;
extern TIM_HandleTypeDef htim1;
/* USER CODE BEGIN EV */
extern osMessageQId TestQueueHandle;
extern osSemaphoreId BinarySemHandle;
extern uint8_t recvBuff[BUFFER_SIZE]; //接收数据缓存
extern volatile uint8_t recvLength; //接收一帧数据的长度
extern volatile uint8_t recvDndFlag; //一帧数据接收完成标志
/* USER CODE END EV */
/******************************************************************************/
/* Cortex-M3 Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Prefetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/******************************************************************************/
/* STM32F1xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32f1xx.s). */
/******************************************************************************/
/**
* @brief This function handles EXTI line0 interrupt.
*/
void EXTI0_IRQHandler(void)
{
/* USER CODE BEGIN EXTI0_IRQn 0 */
/* USER CODE END EXTI0_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(KEY1_Pin);
/* USER CODE BEGIN EXTI0_IRQn 1 */
/* USER CODE END EXTI0_IRQn 1 */
}
/**
* @brief This function handles DMA1 channel4 global interrupt.
*/
void DMA1_Channel4_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Channel4_IRQn 0 */
/* USER CODE END DMA1_Channel4_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart1_tx);
/* USER CODE BEGIN DMA1_Channel4_IRQn 1 */
/* USER CODE END DMA1_Channel4_IRQn 1 */
}
/**
* @brief This function handles DMA1 channel5 global interrupt.
*/
void DMA1_Channel5_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Channel5_IRQn 0 */
/* USER CODE END DMA1_Channel5_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart1_rx);
/* USER CODE BEGIN DMA1_Channel5_IRQn 1 */
/* USER CODE END DMA1_Channel5_IRQn 1 */
}
/**
* @brief This function handles TIM1 update interrupt.
*/
void TIM1_UP_IRQHandler(void)
{
/* USER CODE BEGIN TIM1_UP_IRQn 0 */
/* USER CODE END TIM1_UP_IRQn 0 */
HAL_TIM_IRQHandler(&htim1);
/* USER CODE BEGIN TIM1_UP_IRQn 1 */
/* USER CODE END TIM1_UP_IRQn 1 */
}
/**
* @brief This function handles USART1 global interrupt.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
uint32_t tmpFlag = 0;
uint32_t temp;
tmpFlag =__HAL_UART_GET_FLAG(&huart1,UART_FLAG_IDLE); //获取IDLE标志位
if((tmpFlag != RESET))//idle标志被置位
{
osSemaphoreRelease(BinarySemHandle);// 给出计数信号量
__HAL_UART_CLEAR_IDLEFLAG(&huart1);//清除标志位
HAL_UART_DMAStop(&huart1); //
temp = __HAL_DMA_GET_COUNTER(&hdma_usart1_rx);// 获取DMA中未传输的数据个数
recvLength = BUFFER_SIZE - temp; //总计数减去未传输的数据个数,得到已经接收的数据个数
recvDndFlag = 1; // 接受完成标志位置1
recvLength = 0;//清除计数
recvDndFlag = 0;//清除接收结束标志位
memset(recvBuff,0,recvLength);
HAL_UART_Receive_DMA(&huart1, recvBuff, BUFFER_SIZE);//重新打开DMA接收,不然只能接收一次数据
}
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
/* USER CODE END USART1_IRQn 1 */
}
/**
* @brief This function handles EXTI line[15:10] interrupts.
*/
void EXTI15_10_IRQHandler(void)
{
/* USER CODE BEGIN EXTI15_10_IRQn 0 */
/* USER CODE END EXTI15_10_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(KEY2_Pin);
/* USER CODE BEGIN EXTI15_10_IRQn 1 */
/* USER CODE END EXTI15_10_IRQn 1 */
}
/* USER CODE BEGIN 1 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
osEvent xReturn;
uint32_t ulReturn;
/* 进入临界段,临界段可以嵌套 */
ulReturn = taskENTER_CRITICAL_FROM_ISR();
if(GPIO_Pin == KEY1_Pin)
{
xReturn.status = osMessagePut(TestQueueHandle, /* 消息队列的句柄 */
send_data1, /* 发送的消息内容 */
0); /* 等待时间 0 */
}
else if(GPIO_Pin == KEY2_Pin)
{
xReturn.status = osMessagePut(TestQueueHandle, /* 消息队列的句柄 */
send_data2, /* 发送的消息内容 */
0); /* 等待时间 0 */
}
/* 退出临界段 */
taskEXIT_CRITICAL_FROM_ISR( ulReturn );
}
/* USER CODE END 1 */
查看打印:
9.2 工程代码
链接:https://pan.baidu.com/s/1qEtLf2QV0DrLrQxxz2dizw?pwd=npeq 提取码:npeq
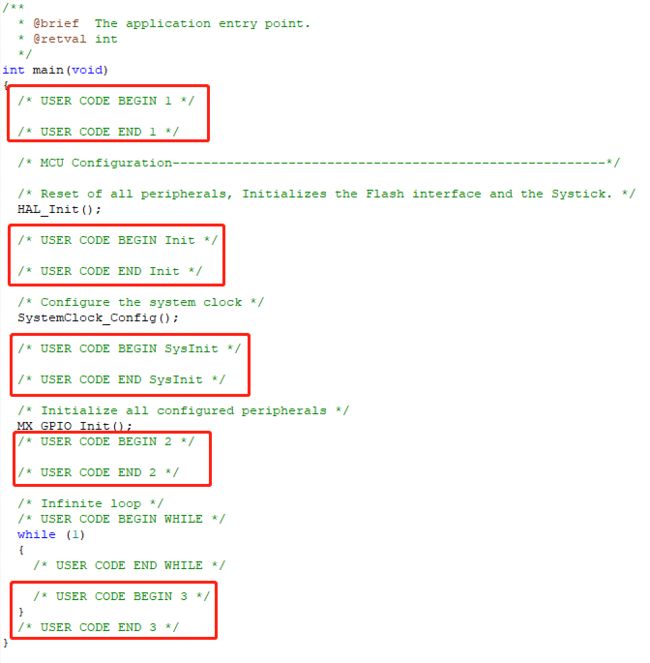
十、注意事项
用户代码要加在 USER CODE BEGIN N 和 USER CODE END N 之间,否则下次使用 STM32CubeMX 重新生成代码后,会被删除。
• 由 Leung 写于 2022 年 1 月 12 日
• 参考:STM32CubeMX+FreeRTOS学习笔记(二)
野火FreeRTOS视频与PDF教程
STM32CubeIDE(十一):FreeRTOS选项中Disable、CMSIS_V1和CMSIS_V2的区别
HAL库中的 SYS Timebase Source 和 SysTick_Handler()