车辆运动学与动力学建模
文章目录
- 前言
- 一、运动学建模
- 二、车辆动力学建模
前言
车辆运动学与动力学建模
一、运动学建模
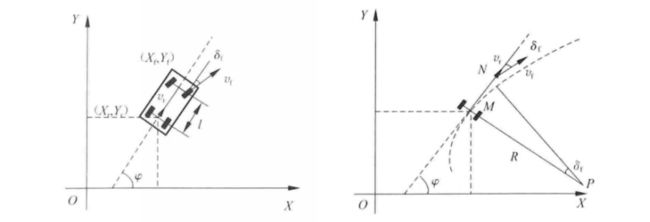
车辆转向运动模型如下图所示。在惯性系OXY下, ( X r , Y r ) (X_r, Y_r) (Xr,Yr)和 ( X f , Y f ) (X_f, Y_f) (Xf,Yf)分别为车辆后轴和前轴轴心的坐标, φ \varphi φ为车体的横摆角(航向角), δ f \delta_f δf为前轮偏角, v r v_r vr为车辆后轴中心速度, v f v_f vf为车辆前轴中心速度, l l l为轴距。
R R R为车轮后轮转向半径, P P P为车辆的瞬时转动中心, M M M为车辆后轴轴心, N N N为前轴轴心。此处假设转向过程中车辆质心侧偏角保持不变,即车辆瞬时转向半径与道路曲率半径相同。
在后轴行驶轴心 ( X r , Y r ) (X_r, Y_r) (Xr,Yr)处,速度为:
v r = X ˙ r c o s φ + Y ˙ r s i n φ (1) v_r = \dot X_r cos\varphi + \dot Y_r sin\varphi \tag{1} vr=X˙rcosφ+Y˙rsinφ(1)
前、后轴的运动学约束为:
{ X ˙ f s i n ( φ + δ f ) − Y ˙ f c o s ( φ + δ f ) = 0 X ˙ r s i n φ − Y ˙ r c o s φ = 0 (2) \begin{cases} \dot X_f sin(\varphi + \delta_f) - \dot Y_f cos(\varphi + \delta_f) = 0 \\ \dot X_r sin \varphi - \dot Y_rcos\varphi = 0 \end{cases} \tag{2} {X˙fsin(φ+δf)−Y˙fcos(φ+δf)=0X˙rsinφ−Y˙rcosφ=0(2)
由1 2 联合得:
{ X ˙ r = v r c o s φ Y ˙ r = v r s i n φ (3) \begin{cases} \dot X_r = v_rcos\varphi \\ \dot Y_r = v_rsin\varphi \end{cases} \tag{3} {X˙r=vrcosφY˙r=vrsinφ(3)
根据前后轮的几何关系可得:
{ X f = X r + l c o s φ Y f = Y r + l s i n φ (4) \begin{cases} X_f = X_r + lcos\varphi \\ Y_f = Y_r + lsin\varphi \end{cases} \tag{4} {Xf=Xr+lcosφYf=Yr+lsinφ(4)
将 3 和 4 代入 2,可解得横摆角速度为:
ω = v r l t a n δ f (5) \omega = \frac{v_r}{l}tan\delta_f \tag{5} ω=lvrtanδf(5)
式中, ω \omega ω为车辆横摆角速度;同时,由 ω \omega ω和车速 v r v_r vr可得到转向半径 R R R和前轮偏角 δ f \delta_f δf:
{ R = v r / ω δ f = a r c t a n ( l / R ) (6) \begin{cases} R = v_r/\omega \\ \delta_f = arctan(l/R) \end{cases} \tag{6} {R=vr/ωδf=arctan(l/R)(6)
由公式 3 和 5 可得到车辆运动学模型为:
[ X ˙ r Y ˙ r φ ˙ ] = [ c o s φ s i n φ t a n δ f / l ] v r (7) \begin{bmatrix} \dot X_r \\ \dot Y_r \\ \dot \varphi \end{bmatrix} = \begin{bmatrix} cos\varphi \\ sin\varphi \\ tan\delta_f / l \end{bmatrix} v_r \tag{7} X˙rY˙rφ˙ = cosφsinφtanδf/l vr(7)
该模型可被进一步表示为更一般的形式:
ξ ˙ k i n = f k i n ( ξ k i n , u k i n ) (8) \dot \xi_{kin} = f_{kin}(\xi_{kin}, u_{kin}) \tag{8} ξ˙kin=fkin(ξkin,ukin)(8)
其中,状态量 ξ k i n = [ X r , Y r , φ ] T \xi_{kin} = [X_r, Y_r, \varphi]^T ξkin=[Xr,Yr,φ]T,控制量 u k i n = [ v r , δ f ] T u_{kin} = [v_r, \delta_f]^T ukin=[vr,δf]T。在无人驾驶车辆的路径跟踪控制过程中,往往希望以 [ v r , ω ] [v_r, \omega] [vr,ω]作为控制量,将式 5 代入式 7 中,该运动学模型可以被转换为如下形式:
[ X ˙ r Y ˙ r φ ˙ ] = [ c o s φ s i n φ 0 ] v r + [ 0 0 1 ] ω (9) \begin{bmatrix} \dot X_r \\ \dot Y_r \\ \dot \varphi \end{bmatrix} = \begin{bmatrix} cos\varphi \\ sin\varphi \\ 0 \end{bmatrix} v_r + \begin{bmatrix} 0 \\ 0 \\ 1 \end{bmatrix} \omega \tag{9} X˙rY˙rφ˙ = cosφsinφ0 vr+ 001 ω(9)
二、车辆动力学建模
理想化假设:
- 假设无人驾驶车辆在平坦路面上形式,忽略车辆垂向运动
- 悬架系统及车辆是刚性的,忽略悬架运动及其对耦合关系的影响。
- 只考虑纯侧偏轮胎特性,忽略轮胎里的纵向耦合关系
- 用单轨模型来描述车辆运动,不考虑在和的作用转移
- 假设车辆行驶速度变化缓慢,忽略前后轴的载荷转移
- 忽略纵向和横向空气动力学
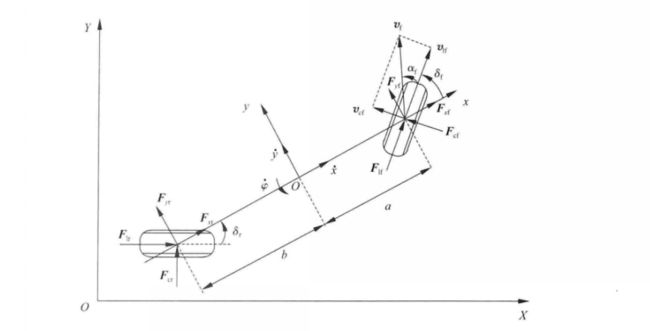
基于以上6点假设,平面运动车辆只具有3个方向的运动,即纵向、横向和横摆运动。设定车辆为前轮驱动。满足以上设定的平面运动车辆单轨模型如图所示。其中,坐标系 o x y z oxyz oxyz为固定于车身的车辆坐标系。 x o y xoy xoy处于车辆左右对称的平面内,车辆质心所在点为坐标原点 o o o, x x x轴为沿车辆纵轴, y y y轴与车辆纵轴方向垂直,而 z z z轴满足右手法则,垂直于 x o y xoy xoy且向上。坐标系 O X Y OXY OXY为固定于地面的惯性坐标系,也满足右手法则
F l f , F l r F_{lf}, F_{lr} Flf,Flr:前、后轮胎的纵向受力
F e f , F e r F_{ef}, F_{er} Fef,Fer:前、后轮胎受到的侧向力
F x f , F x r F_{xf}, F_{xr} Fxf,Fxr:前、后轮胎受到的 x x x方向的力
F y f , F y r F_{yf}, F_{yr} Fyf,Fyr: 前、后轮胎受到的 y y y方向的力
根据牛二定律,分别得沿 x x x轴、 y y y轴和 z z z轴的受力平衡方程
在 x x x轴方向上:
m x ¨ = m y ˙ φ ˙ + 2 F x f + 2 F x r (10) m\ddot x = m\dot y\dot\varphi+2F_{xf}+ 2F_{xr} \tag{10} mx¨=my˙φ˙+2Fxf+2Fxr(10)
在 y y y轴方向上:
m y ¨ = − m x ˙ φ ˙ + 2 F y f + 2 F y r (11) m\ddot y=-m\dot x\dot\varphi+2F_{yf}+2F_{yr} \tag{11} my¨=−mx˙φ˙+2Fyf+2Fyr(11)
绕 z z z轴方向上:
I z φ ¨ = 2 a F y f − 2 b F y r (12) I_z\ddot\varphi=2aF_{yf}-2bF_{yr}\tag{12} Izφ¨=2aFyf−2bFyr(12)
其中 a , b a, b a,b分别为质心到前、后轴的距离, m m m为车辆质量, I z I_z Iz为车辆绕 z z z轴的转动惯量。
轮胎在 x x x方向和 y y y方向上受到的合力与纵、侧向力的转换关系如下:
F x f = F l f c o s δ f − F e f s i n δ f (13) F_{xf} = F_{lf}cos\delta_f - F_{ef}sin\delta_f \tag{13} Fxf=Flfcosδf−Fefsinδf(13)
F x r = F l r c o s δ r − F e r s i n δ r (14) F_{xr} = F_{lr}cos\delta_r - F_{er}sin\delta_r \tag{14} Fxr=Flrcosδr−Fersinδr(14)
F y f = F l f s i n δ f − F e f c o s δ f (15) F_{yf} = F_{lf}sin\delta_f - F_{ef}cos\delta_f \tag{15} Fyf=Flfsinδf−Fefcosδf(15)
F y r = F l r s i n δ r − F e r c o s δ r (16) F_{yr} = F_{lr}sin\delta_r - F_{er}cos\delta_r \tag{16} Fyr=Flrsinδr−Fercosδr(16)
轮胎的纵向力、侧向力可以表示为轮胎侧偏角、滑移率、路面摩擦系数和垂向载荷等参数的复杂函数:
F l = f l ( α , s , μ , F z ) (17) F_l = f_l(\alpha, s, \mu, F_z) \tag{17} Fl=fl(α,s,μ,Fz)(17)
F e = f e ( α , s , μ , F z ) (18) F_e = f_e(\alpha, s, \mu, F_z) \tag{18} Fe=fe(α,s,μ,Fz)(18)
式中, α \alpha α为轮胎侧偏角, s s s为滑移率, μ \mu μ为路面摩擦系数, F z F_z Fz为轮胎所受到的垂向载荷。
轮胎的侧偏角 α \alpha α可以由几何关系得到:
α = t a n − 1 v c v l (19) \alpha = tan^{-1}\frac{v_c}{v_l} \tag{19} α=tan−1vlvc(19)
式中, v c v_c vc和 v l v_l vl位轮胎在侧向、纵向的速度,可以用坐标系方向的速度 v x v_x vx和 v y v_y vy表示:
v l = v y s i n δ + v x c o s δ (20) v_l = v_ysin\delta + v_xcos\delta \tag{20} vl=vysinδ+vxcosδ(20)
v e = v y c o s δ − v x s i n δ (21) v_e = v_ycos\delta - v_xsin\delta \tag{21} ve=vycosδ−vxsinδ(21)
式中, δ \delta δ为轮胎侧转角。
轮胎的速度往往难以直接获取,一般可以通过车辆速度计算得到。根据上图中的速度关系可以推导出以下转换关系:
v y f = y ˙ + a φ ˙ v y r = y ˙ − b φ ˙ (22) \begin{matrix} v_{yf} = \dot y + a\dot \varphi & v_{yr} = \dot y - b\dot \varphi \tag{22} \end{matrix} vyf=y˙+aφ˙vyr=y˙−bφ˙(22)
v x f = x ˙ v x r = x ˙ (23) \begin{matrix} v_{xf} = \dot x & v_{xr} = \dot x \tag{23} \end{matrix} vxf=x˙vxr=x˙(23)
轮胎在地面上的滑移率 s s s可以由以下算式计算:
s = { r v ω t / v − 1 ( v > r ω t , v ≠ 0 ) 1 − v / ( r ω t ) ( v < r ω t , ω t ≠ 0 ) (24) s = \begin{cases} rv\omega_t/v - 1(v>r\omega_t, v \neq 0) \\ 1 - v/(r\omega_t)(v
式中, r r r为车轮半径, ω t \omega_t ωt为车轮旋转角速度。
假设车辆行驶速度变化缓慢,忽略前后轴的载荷转移,可以通过以下算式计算得到车辆前、后轮胎所受到的垂向载荷:
F z f = b m g 2 ( a + b ) (25) F_{zf} = \frac{bmg}{2(a+b)} \tag{25} Fzf=2(a+b)bmg(25)
F z r = a m g 2 ( a + b ) (26) F_{zr} = \frac{amg}{2(a+b)} \tag{26} Fzr=2(a+b)amg(26)
最后,考虑车身坐标系与惯性坐标系之间的转换关系,可得:
Y ˙ = x ˙ s i n φ + y ˙ c o s φ (27) \dot Y = \dot x sin\varphi + \dot y cos\varphi \tag{27} Y˙=x˙sinφ+y˙cosφ(27)
X ˙ = x ˙ c o s φ − y ˙ s i n φ (28) \dot X = \dot x cos\varphi - \dot y sin\varphi \tag{28} X˙=x˙cosφ−y˙sinφ(28)
结合式(10~28),可以的到车辆非线性动力学模型。通过算式间的代换,除了路面摩擦系数 μ \mu μ和滑移率 s s s外,其他参数都可以由车辆状态信息计算得到。路面摩擦系数 μ \mu μ为道路固有信息,给定道路条件后就能获取。把滑移率 s s s作为系统的控制量,将有效改善车辆在低附着路面的行驶性能,但对与滑移率的控制本身就是一个复杂的控制问题。因此,假设被控制车辆具备良好的防抱死制动系统(ABS),滑移率始终保持在最佳工作点,将系统描述为以下状态空间表达式:
ξ ˙ d y n = f d y n ( ξ d y n , u d y n ) η d y n = h d y n ( ξ d y n ) (29) \begin{matrix} \dot\xi_{dyn} = f_{dyn}(\xi_{dyn}, u_{dyn}) \\ \eta_{dyn} = h_{dyn}(\xi_{dyn}) \end{matrix} \tag{29} ξ˙dyn=fdyn(ξdyn,udyn)ηdyn=hdyn(ξdyn)(29)
在该系统中,状态量选取为 ξ d y n = [ y ˙ , x ˙ , φ , φ ˙ , Y , X ] T \xi_{dyn} = \left[ \dot y, \dot x, \varphi, \dot \varphi, Y, X\right]^T ξdyn=[y˙,x˙,φ,φ˙,Y,X]T,控制量选取为 u d y n = δ f u_{dyn}=\delta_f udyn=δf(仅考虑前轮转向车辆, δ r \delta_r δr视为0),输出量选取为 η d y n = [ φ , Y ] T \eta_{dyn}=\left[ \varphi, Y\right ]^T ηdyn=[φ,Y]T。在实际的控制过程中,路面摩擦系数 μ \mu μ和滑移率 s s s视为已知量,该模型即模型预测控制器中预测模型的基础。
轮胎模型采用简化后的魔术公式