nasa电池数据集_文章分享—模型与滤波算法结合的锂电池剩余寿命预测方法
论文标题:
Remaining useful life prediction of lithium-ion batteries with adaptive unscented kalman filter and optimized support vector regression
论文作者:
Zhiwei Xue, Yong Zhang, Cheng Cheng, Guijun Ma
论文链接:
https://www.sciencedirect.com/science/article/abs/pii/S0925231219313426
发表期刊:
neurocomputing
概述
为了避免锂离子电池退化引起的事故,准确的电池寿命预测值有助于正确判断电池的老化程度,预测电池的健康工作时间,从而设计出时间充裕的最佳维护策略,从而节约资源,降低成本并确保安全。 本文提出了一种结合 自适应无迹卡尔曼滤波(AUKF)和遗传算法优化支持向量回归(GA-SVR)的综合算法来提高锂电池剩余寿命预测(RUL)的准确性。本文使用 NASA电池数据集进行验证,其中选择B0005、B0006、B0007和B0018号电池数据做验证。本文提出的自适应无迹卡尔曼对噪声协方差进行自适应更新,并采用遗传算法对SVR的关键参数进行优化,最终达到更高的RUL预测精度。实验数据
(a) 4块额定容量为2Ah的锂离子电池进行连续的充放电循环实验,直到电池达到或超过寿命极限,4块电池的容量退化曲线如下图所示:

(b) 充电:1.5A恒流充电到4.2V,4.2V的恒压充电直到电流降至20mA;放电:2A恒流放电,直到四块电池的电压分别降至2.7V、2.5V、2.2V和2.5V;
(c) 四组电池在室温25 ℃下以不同的充电、放电和阻抗运行条件下工作;
(d)由于四组电池的实验条件不同,失效阈值分别选择为1.35Ah、1.35Ah、1.5Ah和1.45Ah;
(e)本文将电池放电过程的容量变化数据作为退化指标。数据地址:https://pan.baidu.com/s/1QrDB6q2q7fRAxv25MvbFaQ(提取码:fuo1)
方法介绍
相比多项式模型和其他经验模型,双指数模型有更好的非线性代表能力,因此本文选用双指数模型作为锂电池容量退化经验模型: 为电池充放电循环数,模型参数 为时变, 表示电池容量,定义输入 。拓展卡尔曼(EKF)在线性化过程中省略了高阶项且求取雅克比矩阵难度很高甚至无法实现,而无迹卡尔曼(UKF)摒弃了线性化过程,采用无迹变换(UnscentedTransform, UT)来处理均值以及协方差的传递问题,相对于 EKF 有着更高的估计精度以及更好的稳定性。
自适应无迹卡尔曼(AUKF)能够自适应地更新 过程噪声协方差(R)以及观测噪声协方差(Q),根据标准UKF更新过程结束后,通过计算量测值与最终量测估计值之间的差值 ,以及残差值之间的协方差 对噪声协方差进行更新。最后过程噪声协方差和观测噪声协方差更新如下:AUKF是UKF的扩充,不但可以避免强噪声的干扰,同时无需计算雅克比矩阵,并且计算复杂度与AEKF类似。因此我们采用 AUKF 算法进行参数拟合能够获得较精准的结果。
本文充分利用得到的机理模型和电池劣化数据,采用数模混合进行剩余寿命预测,根据预测起始点T时刻前的残差数据 建立SVR模型,利用过去m组残差数据 训练模型,其中 , 那么时间t=T时的残差一步预测关系可表示为: 最后根据预测得到的残差序列 加入到AUKF算法的更新过程中,模型参数就可以不断的迭代更新。 单独使用A UKF算法时,模型参数模型参数 是无法更新的,我们利用SVR算法预测了残差数据并将预测的残差数据加入到AUKF的更新过程中,使得AUKF能够不断的迭代更新模型参数,改进了AUKF算法只能滤波,不能预测的缺点。 遗传算法(Genetic Algorithm, GA)是受生物进化过程影响而提出的一种启发式搜索算法,该算法直接对寻优对象进行操作,不受可导和函数连续的限制,采用概率化寻找最优解,不需要确定的规则即可自动获取搜索空间,自适应地调整搜索方向,从而获得所求的最优解。我们通过遗传算法自动寻找SVR的最优参数 和 ,进而进一步提高预测的精度。 综上所述,AUKF算法可以实现过程噪声协方差以及观测噪声协方差自适应更新,改进无迹卡尔曼滤波,提升滤波精度。另一方面,采用SVR进行多步预测, 并加入GA算法对SVR中的参数 和 进行修正,提高了SVR算法的预测精度。该集成算法在到达预测点之后,依旧可以实现模型参数的更新。预测结果
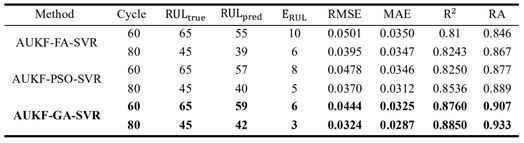
本文采用了传统的均方根误差RMSE,平均绝对误差MAE和 系数作为评价指标。同时引入了预测误差 及其相对误差 来验证 RUL预测准确性。首先对比了该算法在多项式模型和双指数模型,以及在不同优化算法下的预测效果:






分析
该算法预测精度较高有以下几点原因: 1) UKF算 法没有涉及其雅可比矩阵的计算,忽略了高阶项。 2) 自适应特性动态调整估计和预测误差。 3) 引入SVR算法,弥补了AUKF只能进行一步预测的不足。 4)采用了遗传算法对SVR参数进行优化。论文总结
文章根据NASA数据集的特点,提取电池容量作为退化指标,建立了AUKF 算法所需的状态空间模型。采用AUKF算法动态的减小过程噪声以及观测噪声对预测精度的影响。
利用SVR算法改进了AUKF算法只能滤波,不能预测的缺点,同时采用遗传算法实现了对SVR关键参数的优化。
锂离子电池数据存在容量再生的问题,循环周期间隔越久,容量再生现象就愈加明显,用模型来描述电池容量再生问题依旧是一个非常大的挑战。
References
[1] E.A. Wan, R.V.D. Merwe . The unscented kalman filter for nonlinear estimation. in: Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium . 1–7 (2000) . [2] Khelif R, Chebel-Morello B, Malinowski S, et al. Direct Remaining Useful Life Estimation Based on Support Vector Regression[J]. IEEE Transactions on Industrial Electronics. 64(3): 2276-2285 (2017).