S5PV210 | 裸机汇编LED流水灯实验
S5PV210 | 裸机汇编LED流水灯实验
文章目录
- `S5PV210` | 裸机汇编`LED`流水灯实验
-
- 开发板:
- 1.原理图
- 2.Datasheet相关
- 3.代码
-
- 3-1.**代码实现(流水灯,仅作演示)**
- 3-2.工具`mkv210_image`代码
- 4.运行
-  ](https://img-blog.csdnimg.cn/86f2e6c4908a492e9935318babf3b557.png)
](https://img-blog.csdnimg.cn/86f2e6c4908a492e9935318babf3b557.png) - 5.参考
开发板:

1.原理图

上图中,当按下
POWER键后,VDD_5V和VDD_IO会产生5V和3.3V的电压,其中D26无须GPIO控制,为常亮状态,即我们所说的电源指示灯,D[22:25]对应的GPIO口如下:
| LED指示灯 | GPIO口 | 编号 | 动作 |
|---|---|---|---|
| D22 | GPJ_3 | LED1 | 1:灭,0:亮 |
| D23 | GPJ0_4 | LED2 | 1:灭,0:亮 |
| D24 | GPJ0_5 | LED3 | 1:灭,0:亮 |
| D25 | GPD0_1 | LED4 | 1:灭,0:亮 |
对应的
GPIO口输出低电平,点亮LED;反之,熄灭LED灯;
2.Datasheet相关
1.S5PV210 RISC微处理器用户手册:
S5PV210_UM_REV1.1.pdf
获取方式:可在CSDN搜索下载,也可以@大飞歌获取
2.应用手册(内部ROM启动):
S5PV210_iROM_ApplicationNote_Preliminary_20091126.pdf
获取方式:可网路搜索下载,也可以@大飞歌获取
中文文档地址:https://blog.csdn.net/I_feige/article/details/104848609
3.底板电路原理图:
x210bv3s.pdf
下载链接:https://download.csdn.net/download/i_feige/11877902
控制LED GPIO的寄存器设置详细参见以下章节(S5PV210_UM_REV1.1.pdf):
V210_ Book cover
errata
section 01_ overview
section 02_ system
section 03_ bus
section 04_ interupt
section 05_ memory
section 06_ dma
section 07_ timer
section 08_ connectivity _ storage
section 09_ mutimedia
section 10_ audio _ etc
section 11_ securty
section 12_ etc
2.2.7 PORT GROUP GPD0 CONTROL REGISTER
2.2.7.1 Port Group GPD0 Control Register ( GPD0CON , R / W , Address 0xE020_00A0)
2.2.7.2 Port Group GPD0 Control Register ( GPD0DAT , R / W , Address 0xE020_00A4)
2.2.7.3 Port Group GPD0 Control Register ( GPD0PUD , R / W , Address 0xE020_00A8)
2.2.7.4 Port Group GPD0 Control Register ( GPD0DRV , R / W , Address 0xE020_00AC)
2.2.7.5 Port Group GPD0 Control Register ( GPD0CONPDN , R / W , Address 0xE020_00B0)
2.2.7.6 Port Group GPD0 Control Register ( GPD0PUDPDN , R / W , Address 0xE020_00B4)
2.2.20 PORT GROUP GPJ0 CONTROL REGISTER
2.2.20.1 Port Group GPJ0 Control Register ( GPJ0CON , R / W , Address 0xE020_0240)
2.2.20.2 Port Group GPJ0 Control Register ( GPJ0DAT , R / W , Address 0xE020_0244)
2.2.20.3 Port Group GPJ0 Control Register ( GPJ0PUD , R / W , Address 0xE020_0248)
2.2.20.4 Port Group GPJ0 Control Register ( GPJ0DRV , R / W , Address 0xE020_024C)
2.2.20.5 Port Group GPJ0 Control Register ( GPJ0CONPDN , R / W , Address 0xE020_0250)
2.2.20.6 Port Group GPJ0 Control Register ( GPJ0PUDPDN , R / W , Address 0xE020_0254)
GPD0控制寄存器组的相关信息(部分摘取如下):
2.2.7 PORT GROUP GPD0 CONTROL REGISTER
有六个控制寄存器,分别是 GPD0CON、GPD0DAT、GPD0PUD、GPD0DRV、GPD0CONPDN 和
端口组 GPD0 控制寄存器中的 GPD0PUDPDN。
2.2.7.1 端口组 GPD0 控制寄存器 (GPD0CON, R/W, Address = 0xE020_00A0)
| GPD0CON | Bit | Description | Initial State |
|---|---|---|---|
| GPD0CON[3] | [15:12] | 0000 = Input 0001 = Output 0010 = TOUT_3 0011 ~ 1110 = Reserved 1111 = GPD0_INT[3] | 0000 |
| GPD0CON[2] | [11:8] | 0000 = Input 0001 = Output 0010 = TOUT_2 0011 ~ 1110 = Reserved 1111 = GPD0_INT[2] | 0000 |
| GPD0CON[1] | [7:4] | 0000 = Input 0001 = Output 0010 = TOUT_1 0011 ~ 1110 = Reserved 1111 = GPD0_INT[1] | 0000 |
| GPD0CON[0] | [3:0] | 0000 = Input 0001 = Output 0010 = TOUT_0 0011 ~ 1110 = Reserved 1111 = GPD0_INT[0] | 0000 |
2.2.7.2 端口组 GPD0 数据映射寄存器 (GPD0DAT, R/W, Address = 0xE020_00A4)
| GPD0DAT | Bit | Description | Initial State |
|---|---|---|---|
| GPD0DAT[3:0] | [3:0] | 当端口被配置为输入端口时,对应的位是引脚状态。 当端口配置为输出端口时,引脚状态与对应位相同。 当端口被配置为功能引脚时,将读取未定义的值。 | 0000 |
2.2.7.3 端口组 GPD0 上、下拉配置寄存器 (GPD0PUD, R/W, Address = 0xE020_00A8)
| GPD0PUD | Bit | Description | Initial State |
|---|---|---|---|
| GPD0PUD[n] | [2n+1:2n] n=0~3 | 00 = 上拉/下拉禁用 01 = 下拉启用 10 = 上拉启用 11 = 保留 | 0x0055 |
2.2.7.4 端口组 GPD0 驱动强度配置寄存器 (GPD0DRV, R/W, Address = 0xE020_00AC)
| GPD0DRV | Bit | Description | Initial State |
|---|---|---|---|
| GPD0DRV[n] | [2n+1:2n] n=0~3 | 00 = 1x 10 = 2x 01 = 3x 11 = 4x | 0x0000 |
2.2.7.5 端口组 GPD0 低功耗模式配置寄存器 (GPD0CONPDN, R/W, Address = 0xE020_00B0)
| GPD0CONPDN | Bit | Description | Initial State |
|---|---|---|---|
| GPD0[n] | [2n+1:2n] n=0~3 | 00 = Output 0 01 = Output 1 10 = Input 11 = Previous state | 0x00 |
2.2.7.6 端口组 GPD0 低功耗模式上拉/下拉寄存器 (GPD0PUDPDN, R/W, Address = 0xE020_00B4)
| GPD0PUDPDN | Bit | Description | Initial State |
|---|---|---|---|
| GPD0[n] | [2n+1:2n] n=0~3 | 00 = 上拉/下拉禁用 01 = 下拉启用 10 = 上拉启用 11 = 保留 | 0x00 |
例如设置GPD0_1 IO口为输出模式,拉高或者拉低(汇编语言实现):
#define GPD0CON 0xE02000A0
#define GPD0DAT 0xE02000A4
/* 初始化GPIO口(配置为输出模式),下面是比较规范的一种写法,也可参考代码实现(流水灯)相关部分 */
ldr r0,=GPD0CON //r0=0xE02000A0
ldr r1,[r0] //将r0地址处的数据读出,保存到r1中(零偏移)
orr r1,r1,#0x0010 //设置r1的第4位(置1),其他位保持不变[7:4]->0001=Output
str r1,[r0] //将r1中的内容传输到r0中数指定的地址内存中去
/* 点亮LED4,GPIO口输出低电平 */
ldr r0,=GPD0DAT //r0=0xE02000A4
ldr r1,[r0] //将r0地址处的数据读出,保存到r1中(零偏移)
bic r1,r1,#0x0002 //清除r1的第1位(置0),其他位保持不变[1]
str r1,[r0] //将r1中的内容传输到r0中数指定的地址内存中去
/* 熄灭LED4,GPIO口输出高电平 */
ldr r0,=GPD0DAT //r0=0xE02000A4
ldr r1,[r0] //将r0地址处的数据读出,保存到r1中(零偏移)
orr r1,r1,#0x0002 //设置r1的第1位(置1),其他位保持不变[1]
str r1,[r0] //将r1中的内容传输到r0中数指定的地址内存中去
3.代码
3-1.代码实现(流水灯,仅作演示)
/*******************************************************
* > File Name: start.S
* > Author: fly
* > Create Time: 2020年07月17日 星期五 07时56分19秒
******************************************************/
/*=====================================================
* 汇编点亮led灯:对应GPIO口输出低电平,点亮LED
* D22->GPJ0_3
* D23->GPJ0_4
* D24->GPJ0_5
* D25->PWMOUT1/GPD0_1
*====================================================*/
#define GPD0CON 0xE02000A0
#define GPD0DAT 0xE02000A4
#define GPD0PUD 0xE02000A8
#define GPJ0CON 0xE0200240
#define GPJ0DAT 0xE0200244
#define GPJ0PUD 0xE0200248
#define PS_HOLD_CONTORL 0xE010E81C
#define WTCON 0xE2700000
#define SVC_STACK 0xD0037D80
//#define CONFIG_SYS_ICACHE_OFF 1
.global _start
_start:
//给5v电源置锁
//LDR指令:从内存中将1个32位的字读取到目标寄存器中
//STR指令:将1个32位的字数据写入到指令中指定的内存单元中
//ORR指令:逻辑或操作指令
//BIC指令:位清除指令
//MOV指令:数据传送
ldr r0,=PS_HOLD_CONTORL //r0=0xE010E81C
ldr r1,[r0] //将r0地址处的数据读出,保存到r1中(零偏移)
orr r1,r1,#0x300 //设置r1的第8、9位,其他位保持不变
orr r1,r1,#0x1 //设置r1的第1位,其他位保持不变
str r1,[r0] //将r1中的内容传输到r0中数指定的地址内存中去
//关看门狗
ldr r0, =WTCON
mov r1, #0 //将立即数0传输到r1处
str r1, [r0]
//开/关iCache
// MRC指令:从协处理器寄存器传数据到ARM寄存器
// MCR指令:从ARM寄存器传数据到协处理器寄存器
mrc p15, 0, r0, c1, c0, 0
#ifdef CONFIG_SYS_ICACHE_OFF
bic r0, r0, #0x00001000 @ clear bit 12 (I) I-Cache
#else
orr r0, r0, #0x00001000 @ set bit 12 (I) I-Cache
#endif
mcr p15, 0, r0, c1, c0, 0
//设置栈,以便调用c函数
ldr sp, =SVC_STACK
led_init:
/* LED初始化 */
//把GPIO设置输出模式
ldr r0,=0x11111111
ldr r1,=GPJ0CON
str r0, [r1] //把GPJ0所有的IO设置为输出模式
ldr r0,=0x00000010
ldr r1,=GPD0CON
str r0,[r1] //把GPD0_1设置为输出模式
led_run:
/* LED流水灯 */
// 第1步:点亮LED1,其他熄灭
ldr r0, =~(1<<3) //r0=0xFFFFFFF7
ldr r1, =GPJ0DAT //r1=0xE0200244
str r0, [r1]
//熄灭LED4
ldr r0, =~(0<<1) //r0=0xFFFFFFFF
ldr r1, = GPD0DAT
str r0, [r1]
bl delay
// 第2步:点亮LED2,其他熄灭
ldr r0, =~(1<<4) //r0=0xFFFFFFEF
ldr r1, =GPJ0DAT
str r0, [r1]
bl delay
// 第3步:点亮LED3,其他熄灭
ldr r0, =~(1<<5) //r0=0xFFFFFFDF
ldr r1, =GPJ0DAT
str r0, [r1]
bl delay
//熄灭LED3/4/5,点亮LED4
ldr r0, = ((1<<3)|(1<<4)|(1<<5))
ldr r1, =GPJ0DAT
str r0, [r1]
ldr r0, =~(1<<1) //r0=0xFFFFFFFD
ldr r1, = GPD0DAT
str r0, [r1]
bl delay
bl led_run
half:
b half
/* 延时函数:delay*/
delay:
ldr r2,=9000000
ldr r3,=0x0
delay_loop:
//SUB指令:从寄存器Rn中减去shifter_operand表示的数值,
//并将结果保存在目标寄存器Rd中,并根据指令的执行结果
//设置CPSR中的相应标志位
//SUB {} {s} ,,
sub r2,r2,#1 //r2 = r2 - 1
//CMP指令:使用寄存器Rn的值减去shifter_operand的值,
//根据操作的结果更新CPSR中相应的条件标志位,以便后面
//的指令根据相应的条件标志位来判断是否执行
//CMP {} ,
cmp r2, r3
bne delay_loop
mov pc,lr
配套编译Makefile文件:
# 将所有的.o文件链接成.elf文件,“-Ttext 0x0”
# 表示程序的运行地址是0x0,由于目前编写的是位置
# 无关码,可以在任一地址运行
# 将elf文件抽取为可在开发板上运行的bin文件
# 将elf文件反汇编保存在dis文件中,调试程序会用
# 添加文件头
# 编译器版本:arm-2009q3
.PHONY: all clean tools
CROSS ?= arm-linux-
NAME := LED
LD := $(CROSS)ld
OC := $(CROSS)objcopy
OD := $(CROSS)objdump
CC := $(CROSS)gcc
MK := ../../tools/mk_image/mkv210_image
all:$(NAME).bin
$(NAME).bin : start.o
$(LD) -Ttext 0x0 -o $(NAME).elf $^
$(OC) -O binary $(NAME).elf $(NAME).bin
$(OD) -D $(NAME).elf > $(NAME)_elf.dis
$(MK) $(NAME).bin
# 将当前目录下存在的汇编文件及C文件编译成.o文件
%.o : %.S
$(CC) -o $@ $< -c
%.o : %.c
$(CC) -o $@ $< -c
clean:
$(RM) *.o *.elf *.bin *.dis *.sd
tools:
make -C ../../tools/mk_image/
arm-linux-ld:一个链接程序工具,其作用主要是将汇编过的多个二进制文件进行链接,成为一个可执行的二进制文件,这个命令的选项有好多,具体用到的时候大家可以使用--help选项来查看具体的选项用法。
arm-linux-ld -Ttext 0x0 -o led.elf$^:这句话是将所有的依赖文件连接成ELF格式文件,在连接的过程中,-Ttext 0x0这个选项告诉连接器我的这段程序需要被加载到RAM的0x00000000地址处执行。所以在连接的时候第一条语句的连接地址就是0x00000000,第二条语句就是跟在其后面。有很多人都议论连接地址和运行地址这个怎么说的都有。运行地址可以等于连接地址,还可以认为运行地址是pc指针指向的地址,就是正在执行指令的地址。只要理解了这个概念就可以了。
arm-linux-objcopy:被用来复制一个目标文件的内容到另一个文件中.此选项可以进行格式的转换.在实际编程的,用的最多的就是将
ELF格式的可执行文件转换为二进制文件
arm-linux-objdump:常用来显示二进制文件信息,常用来查看反汇编代码
编译:
fly@fly-vm:01-led_s$ make clean
rm -f *.o *.elf *.bin *.dis *.sd *.BIN
fly@fly-vm:01-led_s$ ls
Makefile start.S
fly@fly-vm:01-led_s$ make
arm-linux-gcc -o start.o start.S -c
arm-linux-ld -Ttext 0x0 -o LED.elf start.o
arm-linux-objcopy -O binary LED.elf LED.bin
arm-linux-objdump -D LED.elf > LED_elf.dis
../../tools/mk_image/mkv210_image LED.bin
the checksum 0x000060EB for 228bytes, output: LED.bin.SD.BIN
fly@fly-vm:01-led_s$ ls
LED.bin LED.bin.SD.BIN LED.elf LED_elf.dis Makefile start.o start.S
3-2.工具mkv210_image代码
/*******************************************************************
* > File Name: mkv210_image.c
* > Author: fly
* > Create Time: 2021-06-17 4/24 12:03:22 +0800
* > Note: 将USB启动时使用的BIN文件制作得到SD启动的Image
* 计算校验和,添加16字节文件头,校验和写入第8字节处
*================================================================*/
#include \n" , argv[0]);exit(EXIT_FAILURE);
}
/* 打开源BIN文件 */
fps = fopen(argv[1], "rb");
if (fps == NULL){
printf("fopen %s err: %s\n", argv[1], ERR_STR);
exit(EXIT_FAILURE);
}
/* 创建目标BIN文件 */
fpd = fopen(mk_getCheckSumFile(argv[1]), "w+b");
if (fpd == NULL){
printf("fopen %s err: %s\n", mk_getCheckSumFile(argv[1]), ERR_STR);
fclose(fps);exit(EXIT_FAILURE);
}
/* 获取源文件大小 */
fileLen = mk_getFileLen(fps);
if(fileLen < (IMG_SIZE - SPL_HEADER_SIZE)){
count = fileLen;
}else{
count = IMG_SIZE - SPL_HEADER_SIZE;
}
BUF = (char *)malloc(IMG_SIZE);/* malloc 16KB BUF */
if (BUF == NULL){
printf("malloc err: %s\n", ERR_STR);
fclose(fps);fclose(fpd);
exit(EXIT_FAILURE);
}
memcpy(&BUF[0], SPL_HEADER, SPL_HEADER_SIZE);
nbytes = fread(BUF+SPL_HEADER_SIZE, 1, count, fps);
/* 计算文件检验和 */
pBUF = BUF + SPL_HEADER_SIZE;
for(i = 0, checksum = 0; i< IMG_SIZE - SPL_HEADER_SIZE; i++)
{
checksum += (0x000000FF) & *pBUF++;
}
pBUF = BUF + 8;
*((unsigned int *)pBUF) = checksum;
/* 将校验和源文件写入目标文件 */
fwrite(BUF, 1, IMG_SIZE, fpd);
printf("the checksum 0x%08X for %ldbytes, output: %s\n", \
checksum, fileLen, mk_getCheckSumFile(argv[1]));
free(BUF);
fclose(fps);
fclose(fpd);
return 0;
}

配套Makefile
.PHONY: all clean
CC = gcc
SRC = ${wildcard *.c}
BIN = ${patsubst %.c, %, $(SRC)}
CFLAGS = -g -Wall
RM = rm -rf
PRJ_PATH= $(shell pwd)
all:$(BIN)
$(BIN):%:%.c
@echo [CC] $@
@$(CC) -o $@ $^ $(CFALGS) -D_PRJ_PATH_='"$(PRJ_PATH)"'
clean:
$(RM) a.out $(BIN) .*.*.sw? *.sd
test:
@echo $(PRJ_PATH)
.PHONY: clean test
4.运行
SD卡启动
1.OM5开关打到开发板靠下侧(选择启动方式):


2.将BIN文件下载到SD卡
2-1.Windos下使用x210_Fusing_Tool.exe下载(注意使用管理员模式打开)
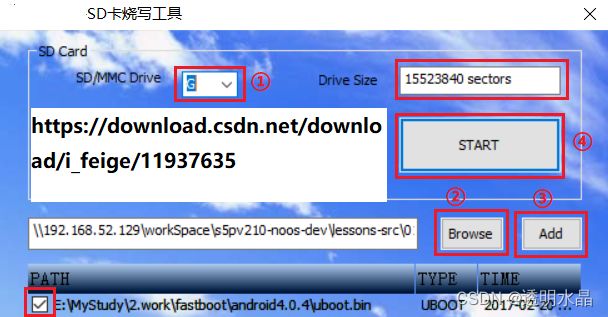
清理
x210_Fusing_Tool.exe文件列表,进入目录:C:\Users\fly\AppData\Roaming\SDFusing,然后删除文件config.ini;
2-2.Linux下载BIN文件到SD卡脚本命令:
#!/bin/sh
#命令行参数检测
if [ -n "$1" ];then
echo "Source file: $1"
else
echo "Usage:$0 "
exit -1
fi
#使用超级用户权限把210.bin读取进来,经过处理再输出到设备sdb上,
#跳过该设备的第一个block(每个block的大小为512B)
sudo dd iflag=dsync oflag=dsync if=$1 of=/dev/sdb seek=1
另一种更具体的脚本写法:
###########################################################
# File Name: s5pv210-irom-sd.sh
# Author: fly
# Created Time: 2021-06-27 0/25 14:51:59 +0800
###########################################################
#!/bin/bash
# s5pv210 irom sd boot fusing tool
# display usage message
USAGE()
{
echo Usage: $(basename "$0") ' '
echo ' device = disk device name of for SD card.'
echo ' bootloader = /path/to/*.bin.sd'
echo 'e.g. '$(basename "$0")' /dev/sdb boot.bin.sd'
}
[ `id -u` == 0 ] || { echo "you must be root user"; exit 1;}
[ -z "$1" -o -z "$2" ] && { USAGE; exit 1; }
dev="$1"
xboot="$2"
# validate parameters
[ -b "${dev}" ] || { echo "${dev} is not a valid block device"; exit 1; }
[ X"${dev}" = X"${dev%%[0-9]}" ] || { echo "${dev} is a partition, please use device, perhaps ${dev%%[0-9]}"; exit 1; }
[ -f ${xboot} ] || { echo "${xboot} is not a bootloader binary file."; exit 1; }
# copy the full bootloader image to block device
dd if="${xboot}" of="${dev}" bs=512 seek=1 conv=sync
sync;
sync;
sync;
echo "^_^ The image is fused successfully"
3.将SD卡插入SD2通道,上电即可查看程序运行状况
接通电源,长按
POWER键;可使用串口工具连接UART2,会有打印调试信息输出;
5.参考
1.书籍:ARM嵌入式体系结构与接口技术(Cortex-A8版)(ARM Embedded Architecture and Interface Technology)
2.书籍:嵌入式LinuxC语言程序设计基础教程(C Language Programming of Embedded Linux)
3.使用的交叉编译器1:https://sourcery.mentor.com/public/gnu_toolchain/arm-none-linux-gnueabi/arm-2009q3-67-arm-none-linux-gnueabi-i686-pc-linux-gnu.tar.bz2
4.编译器下载地址2(CSDN):https://download.csdn.net/download/qq_37363920/12333876?utm_medium=distribute.pc_relevant_t0.none-task-download-2%7Edefault%7EBlogCommendFromMachineLearnPai2%7Edefault-1.baidujs&depth_1-utm_source=distribute.pc_relevant_t0.none-task-download-2%7Edefault%7EBlogCommendFromMachineLearnPai2%7Edefault-1.baidujs
5.项目地址:https://gitee.com/x210bv3s/s5pv210-noos-dev
6.S5PV210_UM_REV1.1.pdf:https://download.csdn.net/download/han1202012/8342745?utm_source=iteye_new
7.S5PV210_iROM_ApplicationNote_Preliminary_20091126.pdf:https://download.csdn.net/download/q171884957/8561553
8.S5PV210_iROM_ApplicationNote_Preliminary_20091126.pdf(中文版本):https://blog.csdn.net/I_feige/article/details/104848609
9.x210_Fusing_Tool.exe下载地址:https://download.csdn.net/download/i_feige/11937635