Baumer工业相机堡盟相机如何使用偏振功能(偏振相机优点和行业应用)(C++)
项目场景:
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有快速数据传输、低功耗、易于集成以及高度可扩展性等特点。
Baumer相机系列中偏振相机的特殊功能有助于在一些特殊应用场合使用。
技术背景
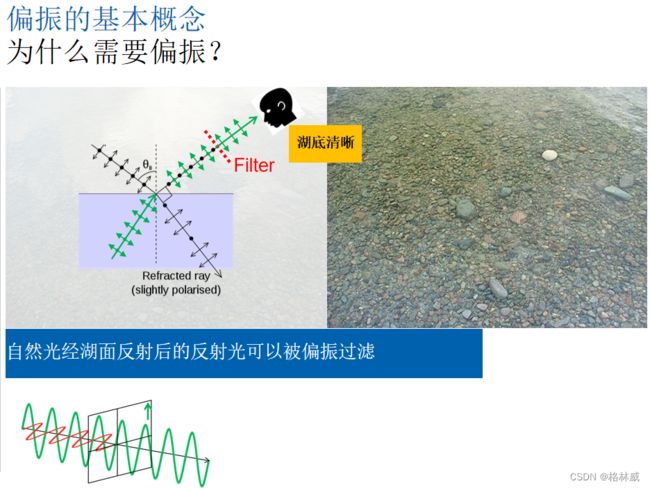
偏光工业相机相机旨在捕捉偏光,以提高图像质量,减少各种工业应用中的眩光。
这些相机的镜头中集成了偏振滤光片,可以帮助改善图像对比度,提高色彩饱和度,并减少闪亮表面的反射。
偏光工业相机的一些关键特征可能包括高分辨率、快速帧率、适用于工业环境的坚固设计,以及与不同照明条件的兼容性。
此外,它们可能具有触发、曝光控制和图像处理能力等功能,有助于为检查和分析目的捕获清晰和详细的图像。


代码分析
Baumer工业相机堡盟相机SDK示例中020_Polarized.cpp详细介绍了如何配置相机偏振功能。
软件SDK示例地址如下所示:Baumer_GAPI_SDK_2.12.0_win_x86_64_cpp\examples\src\0_Common\020_Polarized\020_Polarized.cpp

Baumer工业相机系列中VCXU-50MP和VCXG-50MP为偏振工业相机。
| Model |
Resolution |
Sensor |
Frame rate GigE USB3 |
||
| VCXG-50MP |
5 MP |
2448 × 2048 |
Sony IMX250MZR (2/3″, 3.45 µm) |
35|24 |
- |
| VCXU-50MP |
5 MP |
2448 × 2048 |
Sony IMX250MZR (2/3″, 3.45 µm) |
- |
77 |
该示例描述了如何使用所提供的堡盟GAPI API功能来配置相机并计算所需的偏振数据(AOL、DOP、ADOLP、Intensity)
代码整体结构相对简单,在相机初始化后进行相机的偏振功能使用,部分核心代码如下:
std::cout << std::endl;
std::cout << "POLARIZER CONFIGURATION" << std::endl;
std::cout << "#######################" << std::endl << std::endl;
try {
// Enable or disable interpolation
polarizer.EnableInterpolation(enableInterpolation);
std::cout << "Interpolation " << (enableInterpolation ? "on" : "off") << std::endl;
// Configure the polarizer to use the calibration values from the camera device
polarizer.ReadCalibrationData(pDevice);
}
catch (BGAPI2::Exceptions::IException& ex) {
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
// Enable requested polarisation formats and create image containers
try {
for (std::set::const_iterator component = sComponents.begin();
component != sComponents.end(); component++) {
std::map::const_iterator c = supportedComponents.find(*component);
if (c == supportedComponents.end()) {
std::cout << *component << ":" << " not supported" << std::endl;
returncode = (returncode == 0) ? 1 : returncode;
} else if (requestedComponents.find(c->second) == requestedComponents.end()) {
polarizer.Enable(c->second, true);
std::cout << *component << ":" << " enabled" << std::endl;
requestedComponents.insert(
std::pair(c->second, imgProc.CreateImage()));
}
}
}
catch (BGAPI2::Exceptions::IException& ex) {
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
if (returncode) {
ReleaseAllResources(pSystem, pInterface, pDevice, pDataStream, &requestedComponents);
return returncode;
} 下面是几个偏振相机常使用的函数方法代码:
void GetSupportedComponents(BGAPI2::Polarizer* const polarizer,
const bool is_color,
std::string* const help) {
BGAPI2::Polarizer::formatlist list;
for (BGAPI2::Polarizer::formatlist::const_iterator it = list.begin(); it != list.end(); it++) {
if (BGAPI2::Polarizer::IsFormatAvailable(*it, is_color)) {
std::string componentName = polarizer->GetFormatString(*it).get();
supportedComponents.insert(std::pair(componentName, *it));
if (help->length() > 0) {
*help += "/";
}
*help += componentName;
}
}
}
// Get the required components from the command line argument
void argumentComponent(const Argument& /*argument*/, const ArgumentMode mode, const char* const pParam) {
static bool bClearComponents = true;
if (mode == eArgumentInit) {
sComponents.clear();
const char* components[] = { "Intensity", "AOP", "DOLP", "POL", "UNPOL", "ADOLP" };
for (unsigned int i = 0; i < sizeof(components) / sizeof(components[0]); i++) {
if (supportedComponents.find(components[i]) != supportedComponents.end()) {
sComponents.insert(components[i]);
}
}
bClearComponents = true;
} else {
if (bClearComponents) {
sComponents.clear();
bClearComponents = false;
}
if (pParam != NULL) {
if (sComponents.find(pParam) == sComponents.end()) {
sComponents.insert(pParam);
}
}
}
}
// Get the Angle Offset from the command line parameter (if provided) and use it for the calculation
void argumentAopOffset(const Argument& /*argument*/, const ArgumentMode mode, const char* const pParam) {
if (mode == eArgumentInit) {
g_aopOffset = 0.0;
g_bAopOffset = false;
} else {
double value = 0.0;
int ret_value = 0;
#if defined(_WIN32)
ret_value = sscanf_s(pParam, "%lf", &value);
#else
ret_value = sscanf(pParam, "%lf", &value);
#endif
if ((pParam != NULL) && (ret_value == 1)) {
g_aopOffset = value;
g_bAopOffset = true;
}
}
}
// Helper to filter found cameras devices and select only polarization camera for this example
bool PolarizationDeviceFilter(BGAPI2::Device* const pDevice) {
return BGAPI2::Polarizer::IsPolarized(pDevice, NULL);
}
int GetFirstDevice(DeviceMatch* const pMatch,
bool(*pSystemFilter)(BGAPI2::System* pSystem),
bool(*pInterfaceFilter)(BGAPI2::Interface* pInterface),
bool(*pDeviceFilter)(BGAPI2::Device* pDevice),
std::ostream* log) {
int returncode = 0;
*log << "SYSTEM LIST" << std::endl;
*log << "###########" << std::endl << std::endl;
try {
BGAPI2::SystemList* pSystemList = BGAPI2::SystemList::GetInstance();
// Counting available systems (TL producers)
pSystemList->Refresh();
*log << "5.1.2 Detected systems: " << pSystemList->size() << std::endl;
// System device information
for (BGAPI2::SystemList::iterator sysIterator = pSystemList->begin();
sysIterator != pSystemList->end();
sysIterator++) {
BGAPI2::System* const pSystem = *sysIterator;
*log << " 5.2.1 System Name: " << pSystem->GetFileName() << std::endl;
*log << " System Type: " << pSystem->GetTLType() << std::endl;
*log << " System Version: " << pSystem->GetVersion() << std::endl;
*log << " System PathName: " << pSystem->GetPathName() << std::endl << std::endl;
}
for (BGAPI2::SystemList::iterator sysIterator = pSystemList->begin();
sysIterator != pSystemList->end();
sysIterator++) {
*log << "SYSTEM" << std::endl;
*log << "######" << std::endl << std::endl;
BGAPI2::System* const pSystem = *sysIterator;
pMatch->pSystem = pSystem;
try {
pSystem->Open();
*log << "5.1.3 Open next system " << std::endl;
*log << " 5.2.1 System Name: " << pSystem->GetFileName() << std::endl;
*log << " System Type: " << pSystem->GetTLType() << std::endl;
*log << " System Version: " << pSystem->GetVersion() << std::endl;
*log << " System PathName: " << pSystem->GetPathName() << std::endl << std::endl;
*log << " Opened system - NodeList Information " << std::endl;
*log << " GenTL Version: " << pSystem->GetNode("GenTLVersionMajor")->GetValue() << "."
<< pSystem->GetNode("GenTLVersionMinor")->GetValue() << std::endl << std::endl;
const char* pCloseSystemReason = "???";
if ((pSystemFilter != NULL) && (pSystemFilter(pSystem) == false)) {
pCloseSystemReason = "skipped";
} else {
*log << "INTERFACE LIST" << std::endl;
*log << "##############" << std::endl << std::endl;
try {
BGAPI2::InterfaceList* pInterfaceList = pSystem->GetInterfaces();
// Count available interfaces
pInterfaceList->Refresh(100); // timeout of 100 msec
*log << "5.1.4 Detected interfaces: " << pInterfaceList->size() << std::endl;
// Interface information
for (BGAPI2::InterfaceList::iterator ifIterator = pInterfaceList->begin();
ifIterator != pInterfaceList->end();
ifIterator++) {
BGAPI2::Interface* const pInterface = *ifIterator;
*log << " 5.2.2 Interface ID: " << pInterface->GetID() << std::endl;
*log << " Interface Type: " << pInterface->GetTLType() << std::endl;
*log << " Interface Name: " << pInterface->GetDisplayName() << std::endl
<< std::endl;
}
*log << "INTERFACE" << std::endl;
*log << "#########" << std::endl << std::endl;
for (BGAPI2::InterfaceList::iterator ifIterator = pInterfaceList->begin();
ifIterator != pInterfaceList->end();
ifIterator++) {
try {
// Open the next interface in the list
BGAPI2::Interface* const pInterface = *ifIterator;
pMatch->pInterface = pInterface;
*log << "5.1.5 Open interface " << std::endl;
*log << " 5.2.2 Interface ID: " << pInterface->GetID() << std::endl;
*log << " Interface Type: " << pInterface->GetTLType() << std::endl;
*log << " Interface Name: " << pInterface->GetDisplayName() << std::endl;
pInterface->Open();
const char* pReason = "???";
if ((pInterfaceFilter != NULL) && (pInterfaceFilter(pInterface) == false)) {
pReason = "skipped";
} else {
// Search for any camera is connected to this interface
BGAPI2::DeviceList* const pDeviceList = pInterface->GetDevices();
pDeviceList->Refresh(100);
if (pDeviceList->size() == 0) {
pReason = "no camera found";
} else {
*log << " " << std::endl;
*log << " Opened interface - NodeList Information " << std::endl;
if (pInterface->GetTLType() == "GEV") {
*log << " GevInterfaceSubnetIPAddress: "
<< pInterface->GetNode("GevInterfaceSubnetIPAddress")->GetValue()
<< std::endl;
*log << " GevInterfaceSubnetMask: "
<< pInterface->GetNode("GevInterfaceSubnetMask")->GetValue()
<< std::endl;
}
if (pInterface->GetTLType() == "U3V") {
// log << " NodeListCount: "
// << pInterface->GetNodeList()->GetNodeCount() << std::endl;
}
// Open the first matching camera in the list
try {
// Counting available cameras
*log << "5.1.6 Detected devices: "
<< pDeviceList->size() << std::endl;
// Device information before opening
for (BGAPI2::DeviceList::iterator devIterator = pDeviceList->begin();
devIterator != pDeviceList->end();
devIterator++) {
BGAPI2::Device* const pDevice = *devIterator;
*log << " 5.2.3 Device DeviceID: "
<< pDevice->GetID() << std::endl;
*log << " Device Model: "
<< pDevice->GetModel() << std::endl;
*log << " Device SerialNumber: "
<< pDevice->GetSerialNumber() << std::endl;
*log << " Device Vendor: "
<< pDevice->GetVendor() << std::endl;
*log << " Device TLType: "
<< pDevice->GetTLType() << std::endl;
*log << " Device AccessStatus: "
<< pDevice->GetAccessStatus() << std::endl;
*log << " Device UserID: "
<< pDevice->GetDisplayName() << std::endl << std::endl;
}
for (BGAPI2::DeviceList::iterator devIterator = pDeviceList->begin();
devIterator != pDeviceList->end();
devIterator++) {
try {
BGAPI2::Device* const pDevice = *devIterator;
pMatch->pDevice = pDevice;
GetDeviceInfo(log, pDevice, true);
if ((pDeviceFilter == NULL) || (pDeviceFilter(pDevice) == true)) {
return returncode;
}
*log << " Close device (skipped) "
<< std::endl << std::endl;
pDevice->Close();
pMatch->pDevice = NULL;
}
catch (BGAPI2::Exceptions::ResourceInUseException& ex) {
returncode = (returncode == 0) ? 1 : returncode;
*log << " Device " << devIterator->GetID() << " already opened "
<< std::endl;
*log << " ResourceInUseException: " << ex.GetErrorDescription()
<< std::endl;
}
catch (BGAPI2::Exceptions::AccessDeniedException& ex) {
returncode = (returncode == 0) ? 1 : returncode;
*log << " Device " << devIterator->GetID() << " already opened "
<< std::endl;
*log << " AccessDeniedException " << ex.GetErrorDescription()
<< std::endl;
}
}
}
catch (BGAPI2::Exceptions::IException& ex) {
returncode = (returncode == 0) ? 1 : returncode;
*log << "ExceptionType: " << ex.GetType() << std::endl;
*log << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
*log << "in function: " << ex.GetFunctionName() << std::endl;
}
pReason = "no camera match";
}
}
*log << "5.1.13 Close interface (" << pReason << ") " << std::endl << std::endl;
pInterface->Close();
pMatch->pInterface = NULL;
}
catch (BGAPI2::Exceptions::ResourceInUseException& ex) {
returncode = (returncode == 0) ? 1 : returncode;
*log << " Interface " << ifIterator->GetID() << " already opened " << std::endl;
*log << " ResourceInUseException: " << ex.GetErrorDescription() << std::endl;
}
}
}
catch (BGAPI2::Exceptions::IException& ex) {
returncode = (returncode == 0) ? 1 : returncode;
*log << "ExceptionType: " << ex.GetType() << std::endl;
*log << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
*log << "in function: " << ex.GetFunctionName() << std::endl;
}
pCloseSystemReason = "no camera match";
}
*log << " Close system (" << pCloseSystemReason << ") " << std::endl << std::endl;
pSystem->Close();
pMatch->pSystem = NULL;
}
catch (BGAPI2::Exceptions::ResourceInUseException& ex) {
returncode = (returncode == 0) ? 1 : returncode;
*log << " System " << sysIterator->GetID() << " already opened " << std::endl;
*log << " ResourceInUseException: " << ex.GetErrorDescription() << std::endl;
}
}
}
catch (BGAPI2::Exceptions::IException& ex) {
returncode = (returncode == 0) ? 1 : returncode;
*log << "ExceptionType: " << ex.GetType() << std::endl;
*log << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
*log << "in function: " << ex.GetFunctionName() << std::endl;
}
return returncode;
}
// Helper to Display various information of the camera
void GetDeviceInfo(std::ostream* log, BGAPI2::Device* const pDevice, const bool bOpen) {
*log << "5.1.7 Open device " << std::endl;
*log << " Device DeviceID: " << pDevice->GetID() << std::endl;
*log << " Device Model: " << pDevice->GetModel() << std::endl;
*log << " Device SerialNumber: " << pDevice->GetSerialNumber() << std::endl;
*log << " Device Vendor: " << pDevice->GetVendor() << std::endl;
*log << " Device TLType: " << pDevice->GetTLType() << std::endl;
*log << " Device AccessStatus: " << pDevice->GetAccessStatus() << std::endl;
*log << " Device UserID: " << pDevice->GetDisplayName() << std::endl << std::endl;
if (bOpen)
pDevice->Open();
*log << " Opened device - RemoteNodeList Information " << std::endl;
*log << " Device AccessStatus: " << pDevice->GetAccessStatus() << std::endl;
BGAPI2::NodeMap* const pRemoteNodeList = pDevice->GetRemoteNodeList();
// Serial number
if (pRemoteNodeList->GetNodePresent("DeviceSerialNumber")) {
*log << " DeviceSerialNumber: "
<< pRemoteNodeList->GetNode("DeviceSerialNumber")->GetValue() << std::endl;
} else if (pRemoteNodeList->GetNodePresent("DeviceID")) {
*log << " DeviceID (SN): "
<< pRemoteNodeList->GetNode("DeviceID")->GetValue() << std::endl;
} else {
*log << " SerialNumber: Not Available " << std::endl;
}
// Display DeviceManufacturerInfo
if (pRemoteNodeList->GetNodePresent("DeviceManufacturerInfo")) {
*log << " DeviceManufacturerInfo: "
<< pRemoteNodeList->GetNode("DeviceManufacturerInfo")->GetValue() << std::endl;
}
// Display DeviceFirmwareVersion or DeviceVersion
if (pRemoteNodeList->GetNodePresent("DeviceFirmwareVersion")) {
*log << " DeviceFirmwareVersion: "
<< pRemoteNodeList->GetNode("DeviceFirmwareVersion")->GetValue() << std::endl;
} else if (pRemoteNodeList->GetNodePresent("DeviceVersion")) {
*log << " DeviceVersion: "
<< pRemoteNodeList->GetNode("DeviceVersion")->GetValue() << std::endl;
} else {
*log << " DeviceVersion: Not Available " << std::endl;
}
if (pDevice->GetTLType() == "GEV") {
*log << " GevCCP: "
<< pRemoteNodeList->GetNode("GevCCP")->GetValue() << std::endl;
*log << " GevCurrentIPAddress: "
<< pRemoteNodeList->GetNode("GevCurrentIPAddress")->GetValue() << std::endl;
*log << " GevCurrentSubnetMask: "
<< pRemoteNodeList->GetNode("GevCurrentSubnetMask")->GetValue() << std::endl;
}
*log << std::endl;
}
// Release all allocated resources
int ReleaseAllResources(BGAPI2::System* pSystem,
BGAPI2::Interface* pInterface,
BGAPI2::Device* pDevice,
BGAPI2::DataStream* pDataStream,
std::map* requestedComponents) {
try {
if (pDataStream) {
pDataStream->Close();
}
if (pDevice) {
pDevice->Close();
}
if (pInterface) {
pInterface->Close();
}
if (pSystem) {
pSystem->Close();
}
BGAPI2::SystemList::ReleaseInstance();
for (std::map::iterator it = requestedComponents->begin();
it != requestedComponents->end(); it++) {
if (it->second != NULL) {
it->second->Release();
it->second = NULL;
}
}
requestedComponents->clear();
}
catch (BGAPI2::Exceptions::IException& ex) {
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
return 1;
}
return 0;
}
偏振功能的优点
1、减少闪亮或光亮表面的眩光和反射,提高对比度以更好地检测缺陷或表面特征,并加强颜色区分。
2、它们还可以帮助提高汽车、电子和制造业等行业的自动检测和质量控制过程的准确性和速度。
3、偏振照相机在户外应用中很有用,因为那里有大量的阳光或大气雾霾,否则可能会干扰图像的清晰度。
偏振工业相机相对于普通工业相机的优势
偏光工业相机与普通工业相机相比有几个优点。
1、它们使用偏振滤光片来捕捉在单一方向上振动的光波,减少眩光和闪亮表面的反射。这导致了更清晰和更精确的图像,使其更容易识别高反射表面的缺陷或异常情况。
2、偏光相机还提供更好的对比度和颜色精度,允许精确的颜色测量和分析。
3、偏光相机可以在恶劣的环境条件下使用,并能捕捉到普通相机难以看到的物体的图像。
Baumer偏振相机的行业应用
偏光工业相机通常用于各种工业应用,如质量控制、缺陷检查、材料分析和表面检查。
它们有助于消除眩光和反射,提高玻璃、塑料、金属等各种材料的图像对比度和准确性。
偏光工业相机在检测隐藏的缺陷或污染物、识别材料中的应力点和检查隐藏结构方面也很有用。它们通常用于汽车、航空航天、电子和制造业等行业。
下面简单介绍几个能体现出偏振特性的行业应用:


