我的面试八股(JAVA并发)
程序计数器为什么是线程私有的?
程序计数器主要有下面两个作用:
- 字节码解释器通过改变程序计数器来依次读取指令,从而实现代码的流程控制,如:顺序执行、选择、循环、异常处理。
- 在多线程的情况下,程序计数器用于记录当前线程执行的位置,从而当线程被切换回来的时候能够知道该线程上次运行到哪儿了。
需要注意的是,如果执行的是 native 方法,那么程序计数器记录的是 undefined 地址,只有执行的是 Java 代码时程序计数器记录的才是下一条指令的地址。
所以,程序计数器私有主要是为了线程切换后能恢复到正确的执行位置。
虚拟机栈和本地方法栈为什么是私有的?
- 虚拟机栈: 每个 Java 方法在执行的同时会创建一个栈帧用于存储局部变量表、操作数栈、常量池引用等信息。从方法调用直至执行完成的过程,就对应着一个栈帧在 Java 虚拟机栈中入栈和出栈的过程。
- 本地方法栈: 和虚拟机栈所发挥的作用非常相似,区别是: 虚拟机栈为虚拟机执行 Java 方法 (也就是字节码)服务,而本地方法栈则为虚拟机使用到的 Native 方法服务。 在 HotSpot 虚拟机中和 Java 虚拟机栈合二为一。
所以,为了保证线程中的局部变量不被别的线程访问到,虚拟机栈和本地方法栈是线程私有的。
堆和方法区?
堆和方法区是所有线程共享的资源,其中堆是进程中最大的一块内存,主要用于存放新创建的对象 (几乎所有对象都在这里分配内存),方法区主要用于存放已被加载的类信息、常量、静态变量、即时编译器编译后的代码等数据。
说说线程的生命周期和状态?
6个状态:
- NEW:初始状态,线程创建出来但是没有被调用start()。
- RUNNABLE:运行状态,线程被调用了start()等待运行的状态。
- BLOCKED:阻塞状态,需要等待锁释放。
- WAITING:等待状态,表示该线程需要等待其他线程做出一些特定动作(通知或中断)。
- TIME_WAITING:超时等待状态,可以在指定的时间后自行返回而不是像WAITING那样一直等待。
- TERMINATED:终止状态,表示线程已经运行完毕。

线程创建之后它将处于 NEW(新建) 状态,调用 start() 方法后开始运行,线程这时候处于 READY(可运行) 状态。可运行状态的线程获得了 CPU 时间片(timeslice)后就处于 RUNNING(运行) 状态。
注:在操作系统层面,线程有 READY 和 RUNNING 状态;而在 JVM 层面,只能看到 RUNNABLE 状态,所以 Java 系统一般将这两个状态统称为 RUNNABLE(运行中) 状态 。
为什么 JVM 没有区分READY和RUNNING两种状态呢?
现在的时分(time-sharing)多任务(multi-task)操作系统架构通常都是用所谓的“时间分片(time quantum or time slice)”方式进行抢占式(preemptive)轮转调度(round-robin 式)。这个时间分片通常是很小的,一个线程一次最多只能在 CPU 上运行比如 10-20ms 的时间(此时处于 running 状态),也即大概只有 0.01 秒这一量级,时间片用后就要被切换下来放入调度队列的末尾等待再次调度。(也即回到 ready 状态)。线程切换的如此之快,区分这两种状态就没什么意义了。
什么是线程上下文切换?
线程在执行过程中会有自己的运行条件和状态(也称上下文),比如上文所说到过的程序计数器,栈信息等。当出现如下情况的时候,线程会从占用 CPU 状态中退出。
- 主动让出 CPU,比如调用了 sleep(), wait() 等。
- 时间片用完,因为操作系统要防止一个线程或者进程长时间占用 CPU 导致其他线程或者进程饿死。
- 调用了阻塞类型的系统中断,比如请求 IO,线程被阻塞。
- 被终止或结束运行
这其中前三种都会发生线程切换,线程切换意味着需要保存当前线程的上下文,留待线程下次占用 CPU 的时候恢复现场。并加载下一个将要占用 CPU 的线程上下文。这就是所谓的 上下文切换。
上下文切换是现代操作系统的基本功能,因其每次需要保存信息恢复信息,这将会占用 CPU,内存等系统资源进行处理,也就意味着效率会有一定损耗,如果频繁切换就会造成整体效率低下。
sleep() 方法和 wait() 方法对比
共同点 :两者都可以暂停线程的执行。
区别 :
- sleep() 方法没有释放锁,而 wait() 方法释放了锁 。
- wait() 通常被用于线程间交互/通信,sleep()通常被用于暂停执行。
- wait() 方法被调用后,线程不会自动苏醒,需要别的线程调用同一个对象上的 notify()或者 notifyAll() 方法。sleep()方法执行完成后,线程会自动苏醒,或者也可以使用 wait(long timeout) 超时后线程会自动苏醒。
- sleep() 是 Thread 类的静态本地方法,wait() 则是 Object 类的本地方法。
为什么 wait 方法定义在 Object 类里面,而不是 Thread 类?为什么wait方法在object类中,sleep方法在Thread类中?
sleep()是让某个线程暂停运行一段时间,其控制范围是由当前线程决定,也就是说,在线程里面决定。wait()这是由某个确定的对象来调用的。
sleep()和wait()的本质的区别是一个线程的运行状态控制,一个是线程之间的通讯的问题
sleep():比如说,我要做的事情是 “点火->烧水->煮面”,而当我点完火之后我不立即烧水,我要休息一段时间再烧.对于运行的主动权是由我的流程来控制。
wait():比如说:由某个确定的对象来调用的,将这个对象理解成一个传话的人,当这个人在某个线程里面说"暂停!“,也是 thisOBJ.wait(),这里的暂停是阻塞,还是"点火->烧水->煮饭”,thisOBJ就好比一个监督我的人站在我旁边,本来该线 程应该执行1后执行2,再执行3,而在2处被那个对象喊暂停,那么我就会一直等在这里而不执行3,但正个流程并没有结束,我一直想去煮饭,但还没被允许, 直到那个对象在某个地方说"通知暂停的线程启动!",也就是thisOBJ.notify()的时候,那么我就可以煮饭了,这个被暂停的线程就会从暂停处 继续执行。
具体点:
- wait 和 notify 不仅仅是普通方法或同步工具,更重要的是它们是 Java 中两个线程之间的通信机制。对语言设计者而言, 如果不能通过 Java 关键字(例如 synchronized)实现通信此机制,同时又要确保这个机制对每个对象可用, 那么 Object 类则是的合理的声明位置。记住同步和等待通知是两个不同的领域,不要把它们看成是相同的或相关的。同步是提供互斥并确保 Java 类的线程安全,而 wait 和 notify 是两个线程之间的通信机制。
- 每个对象都可上锁,这是在 Object 类而不是 Thread 类中声明 wait 和 notify 的另一个原因。
- 在 Java 中,为了进入代码的临界区,线程需要锁定并等待锁,他们不知道哪些线程持有锁,而只是知道锁被某个线程持有,并且需要等待以取得锁, 而不是去了解哪个线程在同步块内,并请求它们释放锁。
- Java 是基于 Hoare 的监视器的思想。在Java中,所有对象都有一个监视器。
线程在监视器上等待,为执行等待,我们需要2个参数:
- 一个线程
- 一个监视器(任何对象)
在 Java 设计中,线程不能被指定,它总是运行当前代码的线程。但是,我们可以指定监视器(这是我们称之为等待的对象)。这是一个很好的设计,因为如果我们可以让任何其他线程在所需的监视器上等待,这将导致“入侵”,影响线程执行顺序,导致在设计并发程序时会遇到困难。请记住,在 Java 中,所有在另一个线程的执行中造成入侵的操作都被弃用了(例如 Thread.stop 方法)。
可以直接调用Thread类的run方法吗?
new 一个 Thread,线程进入了新建状态。调用 start()方法,会启动一个线程并使线程进入了就绪状态,当分配到时间片后就可以开始运行了。 start() 会执行线程的相应准备工作,然后自动执行 run() 方法的内容,这是真正的多线程工作。 但是,直接执行 run() 方法,会把 run() 方法当成一个 main 线程下的普通方法去执行,并不会在某个线程中执行它,所以这并不是多线程工作。
调用 start() 方法方可启动线程并使线程进入就绪状态,直接执行 run() 方法的话不会以多线程的方式执行。
Volatile关键字
如何保证可见性?
Volatile只是保证变量可见性,并不能确保原子性,它是依赖CPU提供的特殊指令内存屏障指令来控制可见性,被Volatile修饰的成员变量在被线程访问时在读操作前会强行插入一条内存屏障读指令强行从主存中读取(让高速缓存中的数据失效,重新从主内存加载数据),变量在被线程修改时会在写指令之后插入写屏障,让写入缓存的最新数据写回到主内存。
简单来说,如果将变量声明为volatile,就指示 JVM,这个变量是共享且不稳定的,每次使用它都到主存中进行读取。
Volatile关键字除了保证变量可见性,还有什么作用?
防止JVM的指令重排序。
如果我们将变量声明为 volatile ,在对这个变量进行读写操作的时候,会通过插入特定的 内存屏障 的方式来禁止指令重排序。
如何实现乐观锁
乐观锁一般会使用版本号机制或 CAS 算法实现,CAS 算法相对来说更多一些,这里需要格外注意。
在 Java 中java.util.concurrent.atomic包下面的原子变量类(比如AtomicInteger、LongAdder)就是使用了乐观锁的一种实现方式 CAS 实现的。
版本号机制
一般是在数据表中加上一个数据版本号 version 字段,表示数据被修改的次数。当数据被修改时,version 值会加一。当线程 A 要更新数据值时,在读取数据的同时也会读取 version 值,在提交更新时,若刚才读取到的 version 值为当前数据库中的 version 值相等时才更新,否则重试更新操作,直到更新成功。
CAS算法
CAS 涉及到三个操作数:
- V:要更新的变量值
- E:预期值
- N:拟写入的新值
当且仅当 V 的值等于 E 时,CAS 通过原子方式用新值 N 来更新 V 的值。如果不等,说明已经有其它线程更新了 V,则当前线程放弃更新。
Java 语言并没有直接实现 CAS,CAS 相关的实现是通过 C++ 内联汇编的形式实现的(JNI 调用)。因此, CAS 的具体实现和操作系统以及 CPU 都有关系。
如何解决乐观锁的ABA问题?
ABA 问题的解决思路是在变量前面追加上版本号或者时间戳。
CAS实现的乐观锁还有哪些问题?如何解决?
- 循环时间长开销大:CAS 经常会用到自旋操作来进行重试,也就是不成功就一直循环执行直到成功。如果长时间不成功,会给 CPU 带来非常大的执行开销。如果 JVM 能支持处理器提供的 pause 指令那么效率会有一定的提升。
- 只能保证一个共享变量的原子操作:CAS 只对单个共享变量有效,当操作涉及跨多个共享变量时 CAS 无效。但是从 JDK 1.5 开始,提供了AtomicReference类来保证引用对象之间的原子性,你可以把多个变量放在一个对象里来进行 CAS 操作.所以我们可以使用锁或者利用AtomicReference类把多个共享变量合并成一个共享变量来操作。
Atomic原子类(待补充 )
构造方法可以用 synchronized 修饰么?
构造方法不能使用 synchronized 关键字修饰。
构造方法本身就属于线程安全的,不存在同步的构造方法一说。
ReentrantLock是什么?
ReentrantLock 实现了 Lock 接口,是一个可重入且独占式的锁,和 synchronized 关键字类似。不过,ReentrantLock 更灵活、更强大,增加了轮询、超时、中断、公平锁和非公平锁等高级功能。
ReentrantLock 的底层就是由 AQS 来实现的。
介绍下AQS原理
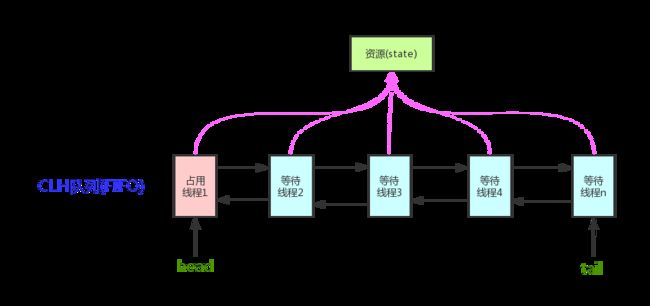
AQS核心思想:如果被请求的共享资源空闲,则将当前请求资源的线程设置为有效的工作线程,并且将共享资源设置为锁定状态。如果被请求的共享资源被占用,那么就需要一套线程阻塞等待以及被唤醒时锁分配的机制,这个机制 AQS 是基于 CLH 锁 实现的。
CLH 锁是对自旋锁的一种改进,是一个虚拟的双向队列(虚拟的双向队列即不存在队列实例,仅存在结点之间的关联关系),暂时获取不到锁的线程将被加入到该队列中。AQS 将每条请求共享资源的线程封装成一个 CLH 队列锁的一个结点(Node)来实现锁的分配。在 CLH 队列锁中,一个节点表示一个线程,它保存着线程的引用(thread)、 当前节点在队列中的状态(waitStatus)、前驱节点(prev)、后继节点(next)。
synchronized 和 ReentrantLock 有什么区别?
-
两者都是可重入锁
可重入锁 也叫递归锁,指的是线程可以再次获取自己的内部锁。比如一个线程获得了某个对象的锁,此时这个对象锁还没有释放,当其再次想要获取这个对象的锁的时候还是可以获取的,如果是不可重入锁的话,就会造成死锁。
JDK 提供的所有现成的 Lock 实现类,包括 synchronized 关键字锁都是可重入的。 -
synchronized 依赖于 JVM 而 ReentrantLock 依赖于 API
synchronized 是依赖于 JVM 实现的,前面我们也讲到了 虚拟机团队在 JDK1.6 为 synchronized 关键字进行了很多优化,但是这些优化都是在虚拟机层面实现的,并没有直接暴露给我们。ReentrantLock 是 JDK 层面实现的(也就是 API 层面,需要 lock() 和 unlock() 方法配合 try/finally 语句块来完成),所以我们可以通过查看它的源代码,来看它是如何实现的。 -
ReentrantLock 比 synchronized 增加了一些高级功能
- 等待可中断:ReentrantLock提供了一种能够中断等待锁的线程的机制,通过 lock.lockInterruptibly() 来实现这个机制。也就是说正在等待的线程可以选择放弃等待,改为处理其他事情。
- 可实现公平锁:ReentrantLock可以指定是公平锁还是非公平锁。而synchronized只能是非公平锁。所谓的公平锁就是先等待的线程先获得锁。ReentrantLock默认情况是非公平的,可以通过 ReentrantLock类的ReentrantLock(boolean fair)构造方法来制定是否是公平的。
- 可实现选择性通知(锁可以绑定多个条件) :synchronized关键字与wait()和notify()/notifyAll()方法相结合可以实现等待/通知机制。ReentrantLock类当然也可以实现,但是需要借助于Condition接口与newCondition()方法。
Condition接口
Condition是 JDK1.5 之后才有的,它具有很好的灵活性,比如可以实现多路通知功能也就是在一个Lock对象中可以创建多个Condition实例(即对象监视器),线程对象可以注册在指定的Condition中,从而可以有选择性的进行线程通知,在调度线程上更加灵活。 在使用notify()/notifyAll()方法进行通知时,被通知的线程是由 JVM 选择的,用ReentrantLock类结合Condition实例可以实现“选择性通知” ,这个功能非常重要,而且是 Condition 接口默认提供的。而synchronized关键字就相当于整个 Lock 对象中只有一个Condition实例,所有的线程都注册在它一个身上。如果执行notifyAll()方法的话就会通知所有处于等待状态的线程,这样会造成很大的效率问题。而Condition实例的signalAll()方法,只会唤醒注册在该Condition实例中的所有等待线程。
读锁为什么不能升级为写锁?
写锁可以降级为读锁,但是读锁却不能升级为写锁。这是因为读锁升级为写锁会引起线程的争夺,毕竟写锁属于是独占锁,这样的话,会影响性能。
另外,还可能会有死锁问题发生。举个例子:假设两个线程的读锁都想升级写锁,则需要对方都释放自己锁,而双方都不释放,就会产生死锁。
ThreadLocal的作用?
实现每一个线程都有自己的专属本地变量。ThreadLocal类主要解决的就是让每个线程绑定自己的值,创建了一个ThreadLocal变量,那么访问这个变量的每个线程都会有这个变量的本地副本,可以使用 get() 和 set() 方法来获取默认值或将其值更改为当前线程所存的副本的值,从而避免了线程安全问题。
ThreadLocal 原理了解吗?
变量是放在了当前线程的 ThreadLocalMap 中,并不是存在 ThreadLocal 上。ThreadLocalMap 理解为ThreadLocal 类实现的定制化的 HashMap。
每个Thread中都具备一个ThreadLocalMap,而ThreadLocalMap可以存储以ThreadLocal为 key ,Object 对象为 value 的键值对。
比如我们在同一个线程中声明了两个 ThreadLocal 对象的话, Thread内部都是使用仅有的那个ThreadLocalMap 存放数据的,ThreadLocalMap的 key 就是 ThreadLocal对象,value 就是 ThreadLocal 对象调用set方法设置的值。
ThreadLocalMap是ThreadLocal的静态内部类。
ThreadLocal 内存泄露问题是怎么导致的?
ThreadLocalMap 中使用的 key 为 ThreadLocal 的弱引用,而 value 是强引用。所以,如果 ThreadLocal 没有被外部强引用的情况下,在垃圾回收的时候,key 会被清理掉,而 value 不会被清理掉。
为什么要用线程池?
- 降低资源消耗:通过重复利用已创建的线程降低线程创建和销毁造成的消耗。
- 提高响应速度:当任务到达时,任务可以不需要等到线程创建就能立即执行。
- 提高线程的可管理性:线程是稀缺资源,如果无限制的创建,不仅会消耗系统资源,还会降低系统的稳定性,使用线程池可以进行统一的分配,调优和监控。
线程池处理任务的流程了解吗?
- 如果当前运行的线程数小于核心线程数,那么就会新建一个线程来执行任务。
- 如果当前运行的线程数等于或大于核心线程数,但是小于最大线程数,那么就把该任务放入到任务队列里等待执行。
- 如果向任务队列投放任务失败(任务队列已经满了),但是当前运行的线程数是小于最大线程数的,就新建一个线程来执行任务。
- 如果当前运行的线程数已经等同于最大线程数了,新建线程将会使当前运行的线程超出最大线程数,那么当前任务会被拒绝,饱和策略会调用RejectedExecutionHandler.rejectedExecution()方法。
如何设定线程池的大小?
- CPU密集任务(N+1): 这种任务消耗的主要是 CPU 资源,可以将线程数设置为 N(CPU 核心数)+1。比 CPU 核心数多出来的一个线程是为了防止线程偶发的缺页中断,或者其它原因导致的任务暂停而带来的影响。一旦任务暂停,CPU 就会处于空闲状态,而在这种情况下多出来的一个线程就可以充分利用 CPU 的空闲时间。
- I/O密集型任务(2N):这种任务应用起来,系统会用大部分的时间来处理 I/O 交互,而线程在处理 I/O 的时间段内不会占用 CPU 来处理,这时就可以将 CPU 交出给其它线程使用。因此在 I/O 密集型任务的应用中,我们可以多配置一些线程,具体的计算方法是 2N。
Future 类有什么用?
Future 类是异步思想的典型运用,主要用在一些需要执行耗时任务的场景,避免程序一直原地等待耗时任务执行完成,执行效率太低。具体来说是这样的:当我们执行某一耗时的任务时,可以将这个耗时任务交给一个子线程去异步执行,同时我们可以干点其他事情,不用傻傻等待耗时任务执行完成。等我们的事情干完后,我们再通过 Future 类获取到耗时任务的执行结果。这样一来,程序的执行效率就明显提高了。
这其实就是多线程中经典的 Future 模式,你可以将其看作是一种设计模式,核心思想是异步调用,主要用在多线程领域,并非 Java 语言独有。
Callable 和 Future 有什么关系?
通过 FutureTask 来理解 Callable 和 Future 之间的关系。
FutureTask 提供了 Future 接口的基本实现,常用来封装 Callable 和 Runnable,具有取消任务、查看任务是否执行完成以及获取任务执行结果的方法。ExecutorService.submit() 方法返回的其实就是 Future 的实现类 FutureTask 。
FutureTask 不光实现了 Future接口,还实现了Runnable 接口,因此可以作为任务直接被线程执行。
FutureTask 有两个构造函数,可传入 Callable 或者 Runnable 对象。实际上,传入 Runnable 对象也会在方法内部转换为Callable 对象。
Semaphore 有什么用?
synchronized 和 ReentrantLock 都是一次只允许一个线程访问某个资源,而Semaphore(信号量)可以用来控制同时访问特定资源的线程数量。
CountDownLatch 有什么用?
CountDownLatch 允许 count 个线程阻塞在一个地方,直至所有线程的任务都执行完毕。CountDownLatch 是一次性的,计数器的值只能在构造方法中初始化一次,之后没有任何机制再次对其设置值,当 CountDownLatch 使用完毕后,它不能再次被使用。
CyclicBarrier 有什么用?
CyclicBarrier 和 CountDownLatch 非常类似,它也可以实现线程间的技术等待,但是它的功能比 CountDownLatch 更加复杂和强大。主要应用场景和 CountDownLatch 类似。
CountDownLatch 的实现是基于 AQS 的,而 CycliBarrier 是基于 ReentrantLock(ReentrantLock 也属于 AQS 同步器)和 Condition 的。
CyclicBarrier 的字面意思是可循环使用(Cyclic)的屏障(Barrier)。它要做的事情是:让一组线程到达一个屏障(也可以叫同步点)时被阻塞,直到最后一个线程到达屏障时,屏障才会开门,所有被屏障拦截的线程才会继续干活。
CyclicBarrier 的原理是什么?
CyclicBarrier 内部通过一个 count 变量作为计数器,count 的初始值为 parties 属性的初始化值,每当一个线程到了栅栏这里了,那么就将计数器减 1。如果 count 值为 0 了,表示这是这一代最后一个线程到达栅栏,就尝试执行我们构造方法中输入的任务。