Camera | 6.v4l2拓扑架构
一、 设备节点、模块、拓扑结构关系
拓扑结构是我们了解MIPI-CSI内部模块以及与摄像头连接关系的最直观最便捷的方法。
1. 如何表示拓扑结构?
-
file视角
-
v4l2视角

来自:
参考文档《RKISP_Driver_User_Manual_v1.3.pdf》
- 模块之间相互独立,通过struct media_entity来进行抽象,通常会将struct media_entity嵌入到其他结构中,以支持media framework功能;
- entity模块包含struct media_pad,pad可以认为是端口,与其他模块进行联系的媒介,针对特定模块来说它是确定的;
- pad通过struct media_link来建立连接,指定source和sink,即可将通路建立起来;
- 各个模块之间最终建立一条数据流,便是一条pipeline了,同一条pipeline中的模块,可以根据前一个模块查找到下一个模块,因此也可以很方便进行遍历,并做进一步的设置操作;
2. 设备节点-------少media的
在/sys/class/video4linux/下可以找到v4l2相关的设备节点:
rk3568_r:/ # ls sys/class/video4linux
ls sys/class/video4linux
v4l-subdev0 v4l-subdev2 video1 video3 video5 video7
v4l-subdev1 video0 video2 video4 video6 video8
rk3568_r:/ # cat sys/class/video4linux/video0/dev
cat sys/class/video4linux/video0/dev
81:0
rk3568_r:/ # cat sys/class/video4linux/video0/name
cat sys/class/video4linux/video0/name
rkisp_mainpath
udev文件系统会为我们在dev/目录下创建一个video0节点,即dev/video0
用户可以打开dev/video0节点,通过IOCTL命令和内核空间进行通信。
rk3568_r:/ # ls /dev/video* -l
ls /dev/video* -l
crw-rw---- 1 media camera 81, 0 2022-11-09 17:06 /dev/video0
crw-rw---- 1 media camera 81, 1 2022-11-09 17:06 /dev/video1
crw-rw---- 1 media camera 81, 2 2022-11-09 17:06 /dev/video2
crw-rw---- 1 media camera 81, 3 2022-11-09 17:06 /dev/video3
crw-rw---- 1 media camera 81, 4 2022-11-09 17:06 /dev/video4
crw-rw---- 1 media camera 81, 5 2022-11-09 17:06 /dev/video5
crw-rw---- 1 media camera 81, 6 2022-11-09 17:06 /dev/video6
crw-rw---- 1 media camera 81, 7 2022-11-09 17:06 /dev/video7
crw-rw---- 1 media camera 81, 8 2022-11-09 17:06 /dev/video8
rk3568_r:/ # ls /dev/v4l-sub* -l
ls /dev/v4l-sub* -l
crw-rw-rw- 1 media camera 81, 9 2022-11-09 17:06 /dev/v4l-subdev0
crw-rw-rw- 1 media camera 81, 10 2022-11-09 17:06 /dev/v4l-subdev1
crw-rw-rw- 1 media camera 81, 11 2022-11-09 17:06 /dev/v4l-subdev2
3. 拓扑结构图
命令media-ctl可以查看拓扑结构图
rk3568_r:/ # media-ctl -d /dev/media0 -p
media-ctl -d /dev/media0 -p
Opening media device /dev/media0
Enumerating entities
Found 13 entities
Enumerating pads and links
Media controller API version 0.0.255
Media device information
------------------------
driver rkisp-vir0
model rkisp0
serial
bus info
hw revision 0x0
driver version 0.0.255
Device topology
- entity 1: rkisp-isp-subdev (4 pads, 7 links)
type V4L2 subdev subtype Unknown
device node name /dev/v4l-subdev0
pad0: Sink
[fmt:SBGGR10/4224x3136
crop.bounds:(0,0)/4096x3072
crop:(0,0)/4096x3072]
<- "rkisp-csi-subdev":1 []
<- "rkisp_rawrd0_m":0 []
<- "rkisp_rawrd2_s":0 []
pad1: Sink
<- "rkisp-input-params":0 []
pad2: Source
[fmt:YUYV2X8/4096x3072
crop.bounds:(0,0)/4096x3072
crop:(0,0)/4096x3072]
-> "rkisp_mainpath":0 []
-> "rkisp_selfpath":0 []
pad3: Source
-> "rkisp-statistics":0 []
- entity 6: rkisp-csi-subdev (6 pads, 5 links)
type V4L2 subdev subtype Unknown
device node name /dev/v4l-subdev1
pad0: Sink
<- "rockchip-csi2-dphy0":1 []
pad1: Source
-> "rkisp-isp-subdev":0 []
pad2: Source
-> "rkisp_rawwr0":0 []
pad3: Source
pad4: Source
-> "rkisp_rawwr2":0 []
pad5: Source
-> "rkisp_rawwr3":0 []
- entity 13: rkisp_mainpath (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video0
pad0: Sink
<- "rkisp-isp-subdev":2 []
- entity 19: rkisp_selfpath (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video1
pad0: Sink
<- "rkisp-isp-subdev":2 []
- entity 25: rkisp_rawwr0 (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video2
pad0: Sink
<- "rkisp-csi-subdev":2 []
- entity 31: rkisp_rawwr2 (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video3
pad0: Sink
<- "rkisp-csi-subdev":4 []
- entity 37: rkisp_rawwr3 (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video4
pad0: Sink
<- "rkisp-csi-subdev":5 []
- entity 43: rkisp_rawrd0_m (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video5
pad0: Source
-> "rkisp-isp-subdev":0 []
- entity 49: rkisp_rawrd2_s (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video6
pad0: Source
-> "rkisp-isp-subdev":0 []
- entity 55: rkisp-statistics (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video7
pad0: Sink
<- "rkisp-isp-subdev":3 []
- entity 61: rkisp-input-params (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video8
pad0: Source
-> "rkisp-isp-subdev":1 []
- entity 67: rockchip-csi2-dphy0 (2 pads, 2 links)
type V4L2 subdev subtype Unknown
device node name /dev/v4l-subdev2
pad0: Sink
<- "m00_b_ov13850 4-0010":0 []
pad1: Source
-> "rkisp-csi-subdev":0 []
- entity 70: m00_b_ov13850 4-0010 (1 pad, 1 link)
type V4L2 subdev subtype Sensor
device node name /dev/v4l-subdev3
pad0: Source
[fmt:SBGGR10/4224x3136]
-> "rockchip-csi2-dphy0":0 []
下面是根据显示内容绘制的拓扑图:

该图中各个entity对应的设备节点名称已经标注。
模块的上方的黄色pad默认是source pad,下方的黄色pad是sink pad
字符设备类型主要有两种(只考虑摄像头):
- /dev/videox (x取值0~8) (所有设备共用主设备号81,次设备号区分)
- /dev/v4l-subdevx (x取值0~3)
video设备主要用于图像操作,必须创建结构体struct video_device变量,
v4l-subdev设备主要对应sensor等具体从设备,必须创建struct v4l2_subdev变量,
内部的isp和csi、csi-dphy也都需要注册为subdev
这些entity由media_entity模块负责维护,将他们连接起来。
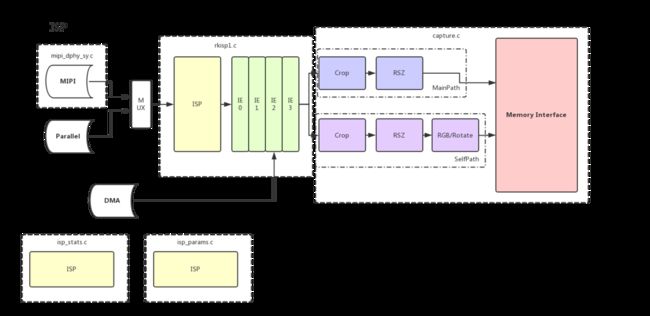
4. 模块功能
这些entity瑞芯微已经设定了他们各自的功能:

这些entity我们可以理解为一个个功能模块。
这些功能模块有的用于驱动csi、有的驱动isp、有的用于预览图像、有的用于统计视频信息、有的用于配置参数。
这些功能模块,并不是都一定每个camera控制器都有的,有一些是通用的,比如,mainpath、selfpath,有一些要完全看SoC设计,即使瑞芯微的SoC,不同型号,差别也不小。所以具体问题要具体分析,不可教条。
v4l2只定义了基本架构,定义好了回调函数接口,要实现模块具体功能只需要填充好对应的回调函数即可,应用层通过这些字符设备文件和对应的ioctrl命令,就可以实现相应的功能。
二、 如何描述拓扑?
1. struct rkisp_device
rk3568的camera控制器使用结构体struct rkisp_device管理所有的资源。
/*
* struct rkisp_device - ISP platform device
* @base_addr: base register address
* @active_sensor: sensor in-use, set when streaming on
* @isp_sdev: ISP sub-device
* @cap_dev: image capture device
* @stats_vdev: ISP statistics output device
* @params_vdev: ISP input parameters device
* @dmarx_dev: image input device
* @csi_dev: mipi csi device
* @br_dev: bridge of isp and ispp device
*/
struct rkisp_device {
struct list_head list;
void __iomem *base_addr;
struct device *dev;
char name[128];
void *sw_base_addr;
struct rkisp_hw_dev *hw_dev;
struct v4l2_device v4l2_dev;
struct v4l2_ctrl_handler ctrl_handler;
struct media_device media_dev;
struct v4l2_async_notifier notifier;
struct v4l2_subdev *subdevs[RKISP_SD_MAX];
struct rkisp_sensor_info *active_sensor;
struct rkisp_sensor_info sensors[RKISP_MAX_SENSOR];
int num_sensors;
struct rkisp_isp_subdev isp_sdev;
struct rkisp_capture_device cap_dev;
struct rkisp_isp_stats_vdev stats_vdev;
struct rkisp_isp_params_vdev params_vdev;
struct rkisp_dmarx_device dmarx_dev;
struct rkisp_csi_device csi_dev;
struct rkisp_bridge_device br_dev;
struct rkisp_luma_vdev luma_vdev;
struct proc_dir_entry *procfs;
struct rkisp_pipeline pipe;
enum rkisp_isp_ver isp_ver;
struct rkisp_emd_data emd_data_fifo[RKISP_EMDDATA_FIFO_MAX];
unsigned int emd_data_idx;
unsigned int emd_vc;
unsigned int emd_dt;
int vs_irq;
struct gpio_desc *vs_irq_gpio;
struct rkisp_hdr hdr;
unsigned int isp_state;
unsigned int isp_err_cnt;
unsigned int isp_isr_cnt;
unsigned int isp_inp;
struct mutex apilock; /* mutex to serialize the calls of stream */
struct mutex iqlock; /* mutex to serialize the calls of iq */
wait_queue_head_t sync_onoff;
dma_addr_t resmem_addr;
phys_addr_t resmem_pa;
size_t resmem_size;
int dev_id;
unsigned int skip_frame;
unsigned int irq_ends;
unsigned int irq_ends_mask;
bool send_fbcgain;
struct rkisp_ispp_buf *cur_fbcgain;
struct rkisp_buffer *cur_spbuf;
bool is_thunderboot;
struct kfifo rdbk_kfifo;
spinlock_t rdbk_lock;
int rdbk_cnt;
int rdbk_cnt_x1;
int rdbk_cnt_x2;
int rdbk_cnt_x3;
u32 rd_mode;
u8 filt_state[RDBK_F_MAX];
};
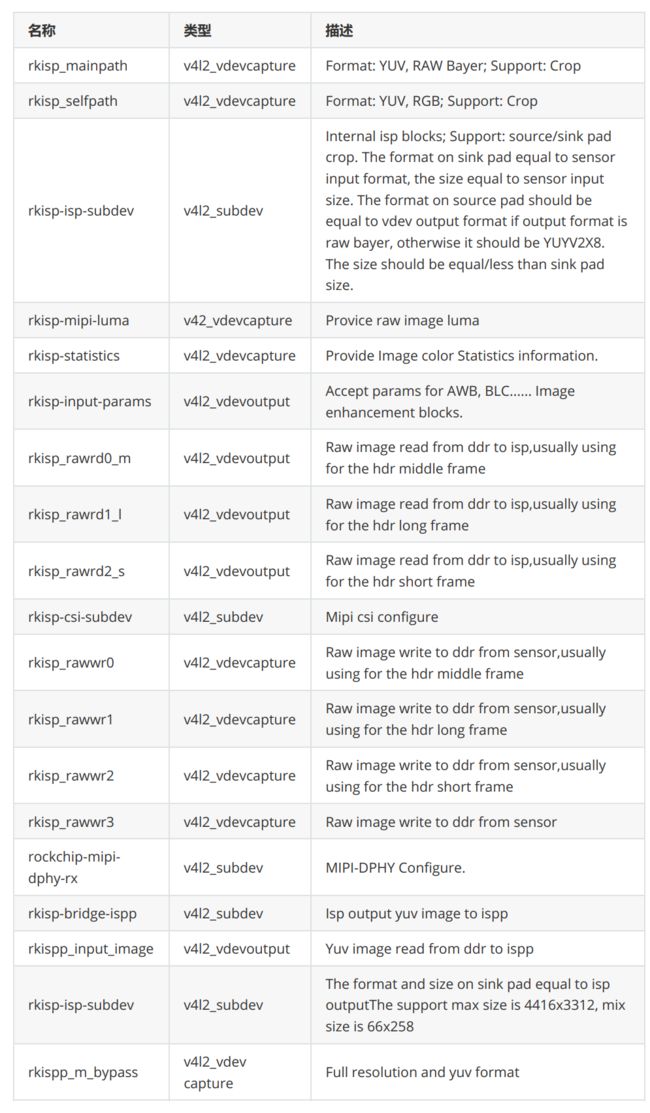
其中与isp2.1拓扑结构相关的的几个结构体成员以及他们之间的关系:
| 成员 | 含义 | 拓扑图中的entity | 设备名 |
|---|---|---|---|
| void __iomem *base_addr | 基地址 | - | - |
| struct rkisp_sensor_info *active_sensor; | 正在使用的sensor | - | - |
| struct rkisp_isp_subdev isp_sdev; | isp模块 | rkisp-isp-subdev | v4l-subdev0 |
| struct rkisp_capture_device cap_dev; | capture模块, 维护struct vb2_v4l2_buffer | 对应拓扑图中的rkisp_mainpath、rkisp_selfpath、rkisp_rawwr0、rkisp_rawwr2、rkisp_rawwr3 | video0~video4 |
| struct rkisp_isp_stats_vdev stats_vdev; | 数据统计模块 | rkisp-statistics | video7 |
| struct rkisp_isp_params_vdev params_vdev; | 参数配置模块 | rkisp-input-params | video8 |
| struct rkisp_dmarx_device dmarx_dev; | dma数据接收模块 | rkisp_rawrd0_m、rkisp_rawrd2_s | video5、video6 |
| struct rkisp_csi_device csi_dev; | csi的sub device从设备 | rkisp-csi-subdev | v4l-subdev1 |
| struct rkisp_bridge_device br_dev; | 桥接模块备,isp2.0中有 | - | - |
| enum rkisp_isp_ver isp_ver; | isp版本号,rk3568是2.1 | - | - |
2. 举例1:rkisp-csi-subdev注册到拓扑结构中
要添加到拓扑结构中,表示该模块的结构体中包含成员struct media_pad ,它和struct v4l2_subdev中的 struct media_entity entity;共同生成拓扑结构。
rkisp-csi-subdev设备结构体定义如下:
struct rkisp_csi_device {
struct rkisp_device *ispdev;
struct v4l2_subdev sd;
struct media_pad pads[CSI_PAD_MAX];
struct sink_info sink[CSI_PAD_MAX - 1];
int max_pad;
u32 err_cnt;
u32 irq_cnt;
u8 mipi_di[CSI_PAD_MAX - 1];
u8 tx_first[HDR_DMA_MAX];
};
参考第二节的拓扑图中 entity6 :
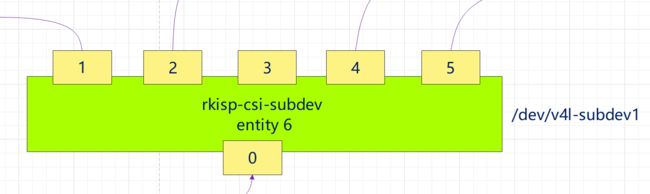
由上图可知,该模块有6个pad,pad属性定义如下
#define MEDIA_PAD_FL_SINK (1 << 0)
#define MEDIA_PAD_FL_SOURCE (1 << 1)
#define MEDIA_PAD_FL_MUST_CONNECT (1 << 2)
pad的名称定义如下:
enum rkisp_csi_pad {
CSI_SINK = 0,
CSI_SRC_CH0,
CSI_SRC_CH1,
CSI_SRC_CH2,
CSI_SRC_CH3,
CSI_SRC_CH4,
CSI_PAD_MAX
};
isp的in pad
//isp的in pad
enum rkisp_isp_inp {
INP_INVAL = 0,
INP_RAWRD0 = BIT(0),
INP_RAWRD1 = BIT(1),
INP_RAWRD2 = BIT(2),
INP_CSI = BIT(4),
INP_DVP = BIT(5),
INP_DMARX_ISP = BIT(6),
INP_LVDS = BIT(7),
INP_CIF = BIT(8),
};
根据该拓扑图,pads[0] 为sink ,pads[1~5] 均为source
以下是驱动中pad初始化代码:
rkisp_register_csi_subdev()
{
……
v4l2_subdev_init(sd, &rkisp_csi_ops);
sd->flags |= V4L2_SUBDEV_FL_HAS_DEVNODE; //是否需要子节点
sd->entity.ops = &rkisp_csi_media_ops;
sd->entity.function = MEDIA_ENT_F_V4L2_SUBDEV_UNKNOWN;
snprintf(sd->name, sizeof(sd->name), CSI_DEV_NAME);//名字前缀,#define CSI_DEV_NAME DRIVER_NAME "-csi-subdev"
csi_dev->pads[CSI_SINK].flags =
MEDIA_PAD_FL_SINK | MEDIA_PAD_FL_MUST_CONNECT; //pad0属性
csi_dev->pads[CSI_SRC_CH0].flags =
MEDIA_PAD_FL_SOURCE | MEDIA_PAD_FL_MUST_CONNECT; //pad1属性
csi_dev->max_pad = CSI_SRC_CH0 + 1;
if (dev->isp_ver == ISP_V20 || dev->isp_ver == ISP_V21) {
csi_dev->max_pad = CSI_PAD_MAX;
csi_dev->pads[CSI_SRC_CH1].flags = MEDIA_PAD_FL_SOURCE;//pad2属性
csi_dev->pads[CSI_SRC_CH2].flags = MEDIA_PAD_FL_SOURCE;//pad3属性
csi_dev->pads[CSI_SRC_CH3].flags = MEDIA_PAD_FL_SOURCE;//pad4属性
csi_dev->pads[CSI_SRC_CH4].flags = MEDIA_PAD_FL_SOURCE;//pad5属性
}
ret = media_entity_pads_init(&sd->entity, csi_dev->max_pad,
csi_dev->pads);
……
}
一些关键的宏汇总:
//各个模块对应的名字
【kernel\drivers\media\platform\rockchip\isp\dev.h】
#define DRIVER_NAME "rkisp"
#define ISP_VDEV_NAME DRIVER_NAME "_ispdev"
#define SP_VDEV_NAME DRIVER_NAME "_selfpath"
#define MP_VDEV_NAME DRIVER_NAME "_mainpath"
#define DMA_VDEV_NAME DRIVER_NAME "_dmapath"
#define RAW_VDEV_NAME DRIVER_NAME "_rawpath"
#define DMATX0_VDEV_NAME DRIVER_NAME "_rawwr0"
#define DMATX1_VDEV_NAME DRIVER_NAME "_rawwr1"
#define DMATX2_VDEV_NAME DRIVER_NAME "_rawwr2"
#define DMATX3_VDEV_NAME DRIVER_NAME "_rawwr3"
#define DMARX0_VDEV_NAME DRIVER_NAME "_rawrd0_m"
#define DMARX1_VDEV_NAME DRIVER_NAME "_rawrd1_l"
#define DMARX2_VDEV_NAME DRIVER_NAME "_rawrd2_s"
#define GRP_ID_SENSOR BIT(0)
#define GRP_ID_MIPIPHY BIT(1)
#define GRP_ID_ISP BIT(2)
#define GRP_ID_ISP_MP BIT(3)
#define GRP_ID_ISP_SP BIT(4)
#define GRP_ID_ISP_DMARX BIT(5)
#define GRP_ID_ISP_BRIDGE BIT(6)
#define GRP_ID_CSI BIT(7)
//pad的属性
[kernel\include\uapi\linux\media.h]
#define MEDIA_PAD_FL_SINK (1 << 0)
#define MEDIA_PAD_FL_SOURCE (1 << 1)
#define MEDIA_PAD_FL_MUST_CONNECT (1 << 2)
由代码可得,拓扑关系由csi_dev->pads描述。
最终调用函数media_entity_pads_init()注册。
rkisp_register_platform_subdevs()
isp_subdev_notifier()
v4l2_async_notifier_parse_fwnode_endpoints()
__v4l2_async_notifier_parse_fwnode_endpoints()
{
for ( fwnode = fwnode_graph_get_next_endpoint())
{
dev_fwnode = fwnode_graph_get_port_parent(fwnode);
is_available = fwnode_device_is_available(dev_fwnode);
fwnode_handle_put(dev_fwnode);
fwnode_graph_parse_endpoint(fwnode, &ep);
}
for ( fwnode = fwnode_graph_get_next_endpoint())
{
dev_fwnode = fwnode_graph_get_port_parent(fwnode);
is_available = fwnode_device_is_available(dev_fwnode);
fwnode_handle_put(dev_fwnode);
fwnode_graph_parse_endpoint(fwnode, &ep);
v4l2_async_notifier_fwnode_parse_endpoint();
}
fwnode_handle_put(fwnode);
}
大家也可以试着去分析其他的模块。
三、设备树如何描述摄像头拓扑结构?
1. 设备树说明文档
瑞芯微MIPI-CSI设备树节点属性说明参考内核说明文档:
[kernel\Documentation\devicetree\bindings\media\]
video-interfaces.txt 关于sensor节点属性的说明,接口类型,
rockchip-isp1.txt isp模块属性说明
rockchip-mipi-dphy.txt dphy模块的说明
kernel\Documentation\devicetree\bindings\media\i2c\ovxxxxxx.txt ov系列的摄像设备树说明
这些文档中有关于port、remote-endpoint等节点的详细说明,如果不是厂家,我们只需要搞懂摄像头拓扑结构即可。
2. ov13850
我们移植的摄像头为ov13850,他的连接关系如下:
- 数据通道通过mipi接口连接到rk3568的mipi通道0
- Camera控制器的csi2-dphy0模块负责从mipi通道中接收数据帧
外设摄像头拓扑关系由设备树来描述,内核会自动解析并帮我们自动注册。
千言万语,不如一图:

由上图可得:
- 摄像头ov13850设备树只有一个port子节点,所以pad为0,out表示该pad是source pad
- remote-endpoint属性表示该pad连接的上游模块的pad名字:mipi_in_ucam0,而模块csi2_dphy0中包含pad:mipi_in_ucam0,所以ov13850连接到该模块
- csi2_dphy0 port0节点的mipi_in_ucam0设备,通过remote-endpoint即可知道该pad所连接的是设备ov13850的pad
- 综上可得csi2_dphy0的pad0(sink pad)连接的ov13850的pad0(source pad)
文中各种mipi技术文档,后台回复关键字:mipi
后面还会继续更新几篇Camera文章,
建议大家订阅本专题!
也可以后台留言,加一口君好友yikoupeng,
拉你进高质量技术交流群。