【CUDA】yolov5前处理
1. 仿射变换
1.1 旋转
变换公式:
[ x ′ y ′ ] = [ cos θ − sin θ sin θ cos θ ] [ x y ] (1.1) \begin{bmatrix} x' \\ y' \end{bmatrix} \tag{1.1} = \begin{bmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} [x′y′]=[cosθsinθ−sinθcosθ][xy](1.1)
具体推导

由于opencv的图像坐标原点在左上角,y轴向下,因此变换矩阵为:
[ x ′ y ′ ] = [ cos θ sin θ − sin θ cos θ ] [ x y ] (1.2) \begin{bmatrix} x' \\ y' \end{bmatrix} \tag{1.2} = \begin{bmatrix} \cos \theta & \sin \theta \\ -\sin \theta & \cos \theta \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} [x′y′]=[cosθ−sinθsinθcosθ][xy](1.2)
1.2 缩放
[ x ′ y ′ ] = [ scale 0 0 scale ] [ x y ] (1.3) \begin{bmatrix} x' \\ y' \end{bmatrix} \tag{1.3} = \begin{bmatrix} \text{scale} & 0 \\ 0 & \text{scale} \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} [x′y′]=[scale00scale][xy](1.3)
1.3 缩放加旋转
[ scale 0 0 scale ] [ cos θ sin θ − sin θ cos θ ] = [ cos θ × scale sin θ × scale − sin θ × scale cos θ × scale ] (1.4) \begin{bmatrix} \text{scale} & 0 \\ 0 & \text{scale} \end{bmatrix} \begin{bmatrix} \cos \theta & \sin \theta \\ -\sin \theta & \cos \theta \end{bmatrix} = \begin{bmatrix} \cos \theta \times \text{scale} & \sin \theta \times \text{scale} \\ -\sin \theta \times \text{scale} & \cos \theta \times \text{scale} \tag{1.4} \end{bmatrix} [scale00scale][cosθ−sinθsinθcosθ]=[cosθ×scale−sinθ×scalesinθ×scalecosθ×scale](1.4)
1.4 平移变换
[ x ′ y ′ 1 ] = [ 1 0 d x 0 1 d y 0 0 1 ] [ x y 1 ] (1.5) \begin{bmatrix} x'\\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & dx \\ 0 & 1 & dy \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x\\ y \\ 1 \end{bmatrix} \tag{1.5} x′y′1 = 100010dxdy1 xy1 (1.5)
1.5 统一使用齐次坐标表示仿射变换(旋转、缩放、平移等)
[ x ′ y ′ 1 ] = [ s cos θ s sin θ d x − s sin θ s cos θ d y 0 0 1 ] [ x y 1 ] (1.6) \begin{bmatrix} x'\\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} s\cos \theta & s\sin \theta & dx\\ -s\sin \theta & s\cos \theta & dy\\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x\\ y \\ 1 \end{bmatrix} \tag{1.6} x′y′1 = scosθ−ssinθ0ssinθscosθ0dxdy1 xy1 (1.6)
1.6 仿射变换逆变换
仿射变换的逆变换是指,将变换(旋转、平移、缩放)过后的图片变换回原图的操作。正向的仿射变换:
x ′ = M x (1.7) x' = Mx \tag{1.7} x′=Mx(1.7)
仿射变换的逆变换:
x = M − 1 x ′ (1.8) x = M^{-1}x' \tag{1.8} x=M−1x′(1.8)
2. yolov5 预处理 python实现
2.1 yolov5预处理
对于目标检测推理而言,通常需要图像等比例缩放并且居中

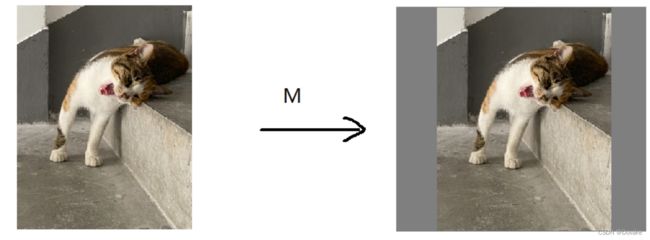
可以分解为三个仿射变换:
2.1.1 缩放
缩放比例 scale \text{scale} scale 为:
scale = min ( d s t W o r i W , d s t H o r i H ) (2.1) \text{scale} = \min(\frac{dstW}{oriW}, \frac{dstH}{oriH}) \tag{2.1} scale=min(oriWdstW,oriHdstH)(2.1)
缩放后的图像尺寸为:
i m g W = d s t W − scale × o r i W i m g H = d s t H − scale × o r i H (2.2) \begin{align} imgW =& dstW - \text{scale} \times oriW imgH =& dstH - \text{scale} \times oriH \end{align} \tag{2.2} imgW=dstW−scale×oriWimgH=dstH−scale×oriH(2.2)

2.1.2 平移
平移矩阵为:
t r a n s M = [ 1 0 − scale × o r i W / 2 0 1 − scale × o r i H / 2 0 0 1 ] (2.2) transM = \begin{bmatrix}1 & 0 &- \text{scale} \times oriW /2\\ 0 &1 & - \text{scale} \times oriH/2 \\ 0 & 0 & 1 \text{} \end{bmatrix} \tag{2.2} transM= 100010−scale×oriW/2−scale×oriH/21 (2.2)

2.1.3 将图像中心平移至画布中心
变换矩阵:
t r a n s M 1 = [ 1 0 d s t W / 2 0 1 d s t H / 2 0 0 1 ] (2.3) transM1 = \begin{bmatrix}1 & 0 & dstW /2\\ 0 &1 & dstH/2 \\ 0 & 0 & 1 \text{} \end{bmatrix} \tag{2.3} transM1= 100010dstW/2dstH/21 (2.3)

这三步分解,其实是为了方便分析复杂的仿射变换组合。因为仿射变换是矩阵乘法是具有可叠加性的。
我们可以得到最后的仿射变换矩阵:
t w = − scale × o r i W / 2 + d s t W / 2 t h = − scale × o r i H / 2 + d s t H / 2 (2.4) \begin{align} tw =& - \text{scale} \times oriW /2 + dstW /2 \\ th=&- \text{scale} \times oriH /2 + dstH/2 \end{align} \tag{2.4} tw=th=−scale×oriW/2+dstW/2−scale×oriH/2+dstH/2(2.4)
M = [ scale 0 t w 0 scale t h 0 0 1 ] (2.4) M = \begin{bmatrix}\text{scale} & 0 & tw \\ 0 &\text{scale} & th\\ 0 & 0 & 1 \text{} \end{bmatrix} \tag{2.4} M= scale000scale0twth1 (2.4)
逆变换:
M = [ 1 / scale 0 − t w scale 0 1 / scale − t h scale 0 0 1 ] (2.5) M = \begin{bmatrix} 1/\text{scale} & 0 & -\frac{tw }{\text{scale}} \\ \\ 0 & 1/ \text{scale} & -\frac{th }{\text{scale}} \\ \\ 0 & 0 & 1 \text{} \end{bmatrix} \tag{2.5} M= 1/scale0001/scale0−scaletw−scaleth1 (2.5)
2.2 双线性插值
2.2.1 双线性插值原理

2.2.1 双线性插值python实现
python代码
def pyWarpAffine(image, M, dst_size, constant=(0,0,0)):
'''
@brief: 带双线性插值的仿射变换,目的像素由源图中的相邻四个点的像素加权决定。
由目的像素位置,计算源图中的对应位置点,并求出原图中相邻四个点的像素值
将原图中的四个点加权得到目的图像素的像素值
如果目的图像素找不到,则使用constant的值代替
@param image(np.ndarray) 原图
@param M(np.ndarray) 变换矩阵
@param dst_size(tuple) 目标图的尺寸
@param constant(tuple) 当找不到像素是,使用constat代替
'''
# 取逆矩阵, dst --> src 变换的矩阵
M = cv2.invertAffineTransform(M)
constant = np.array(constant)
ih, iw = image.shape[:2]
dw, dh = dst_size
dst = np.full((dh, dw, 3), constant, dtype=np.uint8)
in_range = lambda p : p[0] >=0 and p[0] <= dw and p[1] >= 0 and p[1] <= dh
for y in range(dh):
for x in range(dw):
homo_coord = np.array([[x, y, 1]]).T
ox, oy = M @ homo_coord
low_ox = int(np.floor(ox))
low_oy = int(np.floor(oy))
high_ox = low_ox + 1
high_oy = low_oy + 1
# |(low_ox, low_oy) .........(high_ox, low_oy)
# |........p0...............|........p1........|
# |-------------------------|o(dx, dy)---------|
# |.........................|..................|
# |........p2...............|........p3........|
# |.........................|..................|
# | (low_ox, high_oy) .......(high_ox, high_oy)|
dx, dy = ox - low_ox, oy - low_oy
# 取对角矩形的面积作为自己的权重
p0_wight = (1-dx)* (1-dy)
p1_wight = dx * (1-dy)
p2_wight = (1-dx) * dy
p3_wight = dx * dy
p0_value = image[(low_ox, low_oy)] if in_range((low_ox, low_oy) else constant)
p1_value = image[(high_ox, low_oy)] if in_range((high_ox, low_oy) else constant)
p2_value = image[(low_ox, high_ox)] if in_range((low_ox, high_ox) else constant)
p3_value = image[(high_ox, high_ox)] if in_range((high_ox, high_ox) else constant)
dst[y, x] = p0_wight * p0_value + p1_wight * p1_value + p2_wight * p2_value + p3_wight * p3_value
return dst
3. yolov5 预处理 cuda实现
3.1 仿射变换
__device__ void affine_project(float* matrix, int x, int y, float* proj_x, float* proj_y) {
*proj_x = matrix[0] * x + matrix[1] * y + matrix[2];
*proj_y = matrix[3] * x + matrix[4] * y + matrix[5];
}
__global__ void warp_affine_bilinear_kernel (
uint8_t* src, int src_width, int src_height,
uint8_t* dst, int dst_width, int dst_height,
uint8_t fill_val, AffineMatrix matrix,
int channels = 3, bool brg2rgb = true
) {
int src_line_size = src_height * channels;
int dst_line_size = dst_height * channels;
int dx = blockDim.x * blockIdx.x + threadIdx.x;
int dy = blockDim.y * blockIdx.y + threadIdx.y;
if ( dx >= dst_width || dy >= dst_height) return;
float src_x = 0, src_y = 0;
affine_project(matrix.d2i, dx, dy, &src_x, &src_y);
float ch0 = fill_val, ch1 = fill_val, ch2 = fill_val;
float *ch_data = new float[channels];
for(int i = 0; i < channels; ++i) {
ch_data[i] = fill_val;
}
if ( src_x >=0 && src_x <src_width && src_y >= 0 && src_y < src_height) {
int low_x = floorf(src_x);
int low_y = floorf(src_y);
int high_x = low_x + 1;
int high_y = low_y + 1;
uint8_t* const_vals = new uint8_t[channels];
for(int i = 0; i < channels; ++i) {
const_vals[i] = fill_val;
}
// |(low_ox, low_oy) .......|.(high_ox, low_oy)......|
// |........p0...............|........p1..............|
// |-------------------------|o(src_x, src_y)---------|
// |.........................|........................|
// |........p2...............|........p3..............|
// |.........................|........................|
// | (low_ox, high_oy) ......|(high_ox, high_oy)......|
float dx = src_x - low_x;
float dy = src_y - low_y;
float p0_wt = (1-dx) * (1-dy);
float p1_wt = dx * (1-dy);
float p2_wt = (1-dx) * dy;
float p3_wt = dx * dy;
uint8_t* v0 = const_vals;
uint8_t* v1 = const_vals;
uint8_t* v2 = const_vals;
uint8_t* v3 = const_vals;
if (low_y >= 0) {
if (low_x >= 0) {
v0 = src + low_y * src_line_size + low_x * channels;
}
if (high_x < src_width) {
v1 = src + low_y * src_line_size + high_x * channels;
}
}
if(high_y < src_height) {
if (low_x >= 0) {
v2 = src + high_y * src_line_size + low_x * 3;
}
if (high_x < src_width) {
v3 = src + high_y * src_line_size + high_x * 3;
}
}
for (int i = 0; i < channels; ++i) {
ch_data[i] = floorf(p0_wt * v0[i] + p1_wt * v1[i] + p2_wt * v2[i] + p3_wt * v3[i] + 0.5f);
}
} // end if
uint8_t* pdst = dst + dy * dst_line_size + dx * channels;
if (brg2rgb) {
pdst[0] = ch_data[2];
pdst[1] = ch_data[1];
pdst[2] = ch_data[0];
return;
}
for (int i = 0; i < channels; ++i) {
pdst[i] = ch_data[i];
}
}