C++ STL 几个容器的底层实现
C++ STL 的实现:
1.vector 底层数据结构为数组 ,支持快速随机访问
2.list 底层数据结构为双向链表,支持快速增删
3.deque 底层数据结构为一个中央控制器和多个缓冲区,详细见STL源码剖析P146,支持首尾(中间不能)快速增删,也支持随机访问
deque是一个双端队列(double-ended queue),也是在堆中保存内容的.它的保存形式如下:
[堆1] --> [堆2] --> [堆3] --> ...
每个堆保存好几个元素,然后堆和堆之间有指针指向,看起来像是list和vector的结合品.
4.stack 底层一般用list或deque实现,封闭头部即可,不用vector的原因应该是容量大小有限制,扩容耗时
5.queue 底层一般用list或deque实现,封闭头部即可,不用vector的原因应该是容量大小有限制,扩容耗时
(stack和queue其实是适配器,而不叫容器,因为是对容器的再封装)
6.priority_queue 的底层数据结构一般为vector为底层容器,堆heap为处理规则来管理底层容器实现
7.set 底层数据结构为红黑树,有序,不重复
8.multiset 底层数据结构为红黑树,有序,可重复
9.map 底层数据结构为红黑树,有序,不重复
10.multimap 底层数据结构为红黑树,有序,可重复
11.hash_set 底层数据结构为hash表,无序,不重复
12.hash_multiset 底层数据结构为hash表,无序,可重复
13.hash_map 底层数据结构为hash表,无序,不重复
14.hash_multimap 底层数据结构为hash表,无序,可重复
STL 就是所谓的标准模板库(Standard Template Library),这可能是C++程序员的一大利器。
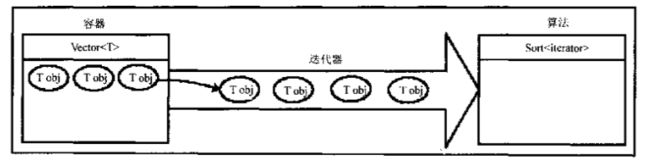
总的来说,STL包括几个部分:容器,算法(泛型算法),迭代器三个主要部分(当然还包含仿函数,适配器等其他部分),下图说明了三个主要部分之间的关系(网图,侵删)。
STL三个主要部分的关系示意图
要是详细的总结,这肯定是一本类似于《C++ Primer》的大书。本篇文章主要是对于STL中的常用容器的底层数据结构进行总结整理。
I、vector
1.1 vector底层数据结构
vector是我们用到最多的数据结构,其底层数据结构是数组,由于数组的特点,vector也具有以下特性:
1、O(1)时间的快速访问;
2、顺序存储,所以插入到非尾结点位置所需时间复杂度为O(n),删除也一样;
3、扩容规则:
当我们新建一个vector的时候,会首先分配给他一片连续的内存空间,如std::vector,当通过push_back向其中增加元素时,如果初始分配空间已满,就会引起vector扩容,其扩容规则在gcc下以2倍方式完成:
首先重新申请一个2倍大的内存空间;
然后将原空间的内容拷贝过来;
最后将原空间内容进行释放,将内存交还给操作系统;
测试代码如下:
#include
#include
using namespace std;
void mycapacity(const vector& vec)
{
cout << "分配总空间大小为:" << vec.capacity() << endl;
}
void mysize(const vector& vec)
{
cout << "已用空间大小为:" << vec.size() << endl;
}
void myprint(const vector& vec)
{
for (int i = 0; i < vec.size(); ++i)
cout << vec[i] << ",";
cout << endl;
}
int main()
{
vector vec;
cout << "起始状态:" << endl;
mycapacity(vec);
mysize(vec);
cout << "========================" << endl;
for (int i = 0; i < 10; ++i) {
vec.push_back(i);
cout << "压入第" << i+1 << "个元素之后:" << endl;
myprint(vec);
mycapacity(vec);
mysize(vec);
cout << "========================" << endl;
}
return 0;
}
测试输出结果
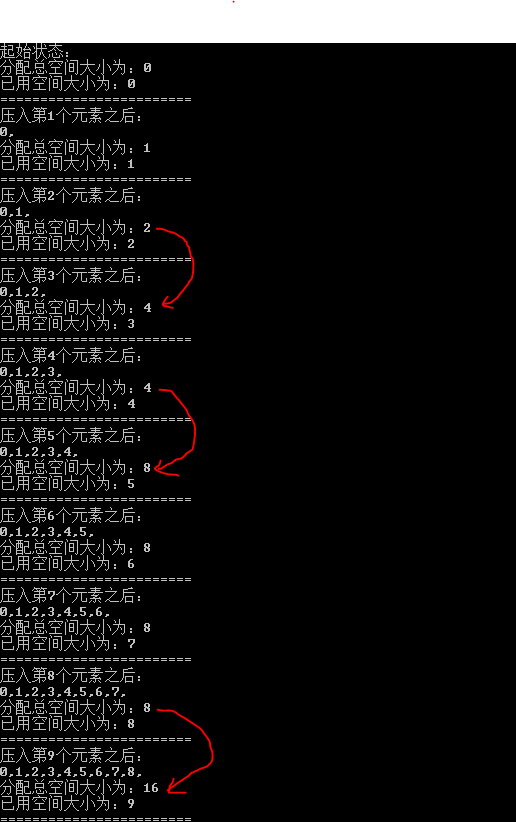
从输出结果中的三个红色箭头可以看出vector的扩容规则。
4、注意事项:
根据vector的插入和删除特性,以及扩容规则,我们在使用vector的时候要注意,在插入位置和删除位置之后的所有迭代器和指针引用都会失效,同理,扩容之后的所有迭代器指针和引用也都会失效。
II、map & multimap & unordered_map & unordered_multimap
2.1 map与multimap底层数据结构
map与multimap是STL中的关联容器、提供一对一key-value的数据处理能力; map与multimap的区别在于,multimap允许关键字重复,而map不允许重复。
这两个关联容器的底层数据结构均为红黑树,关于红黑树的理解可以参考教你透彻了解红黑树一文。
根据红黑树的原理,map与multimap可以实现O(lgn)的查找,插入和删除。
2.2 unordered_map 与unordered_multimap底层数据结构
unordered_map与unordered_multimap 对比2.1中的两种map在于其2.1中的两个容器实现了以key为序排列,也就是说map与multimap为有序的。
而unordered_map与unordered_multimap中key为无序排列,其底层实现为hash table,因此其查找时间复杂度理论上达到了O(n),之所以说理论上是因为在理想无碰撞的情况下,而真实情况未必如此。
III、set & multiset & unordered_set & unordered_multiset
以上四种容器也都是关联容器,set系与map系的区别在于map中存储的是
3.1 set & multiset底层数据结构
set与multiset有序存储元素,这两种容器的底层实现与map一样都是红黑树,所以能实现O(lgn)的查找,插入,删除操作。
set与multiset的区别在于是否允许重复;
3.2 unordered_set & unordered_multiset
与unordered_map & unordered_multimap相同,其底层实现为hash table;
IV、 priority_queue
4.1 priority_queue
优先级队列相当于一个有权值的单向队列queue,在这个队列中,所有元素是按照优先级排列的。
priority_queue根据堆的处理规则来调整元素之间的位置,关于堆的原理,可以参考堆;
根据堆的特性,优先级队列实现了取出最大最小元素时间复杂度为O(1),对于插入和删除,其最坏情况为O(lgn)。
V、 其他数据结构
list的底层数据结构为双向链表,特点是支持快速的增删。
queue为单向队列,为先入先出原则。
deque为双向队列,其对比queue可以实现在头尾两端高效的插入和删除操作。