QT接收ROS视频信息,并将其显示在界面上(含配置过程以及报错解决方案)
QT接收ROS视频信息,并将其显示在界面上
- 一、项目背景
- 二、环境安装
-
- 1、安装ROS对qt pkg的支持
- 2、安装ROS qtc pluging版本QtCreator
- 3、创建ros_qt_gui包
- 4、编译功能包(这里面ROS和QT都有)
- 三、打开QTCreator
- 五、程序细节
-
- main_window.hpp
- main_window.cpp
- qnode.hpp
- qnode.cpp
- 将相机话题中的图像消息转为opencv图像格式,再转为ROS消息发送个QT
- 六、运行结果
- 七、错误总结
-
- 1、Bug-one
- 2、Bug-two
- 3、Bug-three
- 4、Bug-four
- 5、Bug-five
- 6、Bug-six
- 七、QT5和melodic配置时,CMakelist文件的编写
- 八、参考文章
一、项目背景
本项目为室内场景理解,需要机器人开启摄像头检测识别室内物体,进而完成一系列智能操作。而我负责的部分为将机器人所携带的摄像头画面接收,将其显示在QT界面上。因为机器人采用ROS驱动,所以摄像头的视频信息通过ROS的话题传输,因此,QT需要与ROS搭配起来。
二、环境安装
1、安装ROS对qt pkg的支持
我这里的ros版本为kinetic,需要改为自己对应的版本(ubuntu16.04对应kinetic)
sudo apt-get install ros-kinetic-qt-create
sudo apt-get install ros-kinetic-qt-build
如果你的ros版本为melodic,需要改为自己对应的版本(ubuntu18.04对应melodic)
sudo apt-get install ros-melodic-qt-create
sudo apt-get install ros-melodic-qt-build
2、安装ROS qtc pluging版本QtCreator
这个带有ROS插件的QT可以在QtCreator中创建ROS工作空间
下载地址:ros-qtc-pluging-kinetic
也可以去官网下载对应的版本(melodic和kinetic不同,我的是kinetic的)
3、创建ros_qt_gui包
- 创建ROS的工作空间catkin_qt(此时与Qt还没有关系,只是单纯的ROS空间ws)
mkdir -p ~/catkin_qt/src
- 进入src文件夹:
cd ~/catkin_qt/src
- 初始化ROS工作空间:
catkin_init_workspace
这样就在src文件中创建了一个 CMakeLists.txt 的文件,目的是告诉系统,这个是ROS的工作空间。
- 创建完ROS的工作空间后,就能通过catkin_create_qt_pkg命令创建ros_qt_gui包了,在src目录下创建包,本例程将ros_gui包命名为qt_ros_test:
(此时与Qt与ROS已经有关系了)
catkin_create_qt_pkg qt_ros_test

这时候ros_qt_gui的src下自动生成三个.cpp文件
- main.cpp是主函数文件
- main_window.cpp是Qt的ui管理文件
- qnode.cpp是ROS管理节点的文件
同时,include下会有两个hpp文件,分别对应cpp文件的头文件
4、编译功能包(这里面ROS和QT都有)
- 进入工作空间catkin_qt编译
catkin_make
- 更改功能包的Cmakelist.txt,进入这个功能包qt_ros_test之后,看到Cmakelist.txt
打开Cmakelist.txt文件,注意find_package的改动,和*.h的添加
##############################################################################
# CMake
##############################################################################
cmake_minimum_required(VERSION 2.8.0)
project(qt_ros_test)
##############################################################################
# Catkin
##############################################################################
# qt_build provides the qt cmake glue, roscpp the comms for a default talker
find_package(catkin REQUIRED COMPONENTS qt_build roscpp
cv_bridge
image_transport
std_msgs
OpenCV
)
include_directories(${catkin_INCLUDE_DIRS})
# Use this to define what the package will export (e.g. libs, headers).
# Since the default here is to produce only a binary, we don't worry about
# exporting anything.
catkin_package()
##############################################################################
# Qt Environment
##############################################################################
# this comes from qt_build's qt-ros.cmake which is automatically
# included via the dependency call in package.xml
rosbuild_prepare_qt4(QtCore QtGui) # Add the appropriate components to the component list here
##############################################################################
# Sections
##############################################################################
file(GLOB QT_FORMS RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} ui/*.ui)
file(GLOB QT_RESOURCES RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} resources/*.qrc)
file(GLOB_RECURSE QT_MOC RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS include/qt_ros_test/*.hpp *.h) #加*.h可以找到自己额外添加的.h文件
QT4_ADD_RESOURCES(QT_RESOURCES_CPP ${QT_RESOURCES})
QT4_WRAP_UI(QT_FORMS_HPP ${QT_FORMS})
QT4_WRAP_CPP(QT_MOC_HPP ${QT_MOC})
##############################################################################
# Sources
##############################################################################
file(GLOB_RECURSE QT_SOURCES RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS src/*.cpp)
##############################################################################
# Binaries
##############################################################################
add_executable(qt_ros_test ${QT_SOURCES} ${QT_RESOURCES_CPP} ${QT_FORMS_HPP} ${QT_MOC_HPP})
target_link_libraries(qt_ros_test ${QT_LIBRARIES} ${catkin_LIBRARIES})
install(TARGETS qt_ros_test RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})
打开package.xml文件,注意opencv的添加
<?xml version="1.0"?>
<package>
<name>qt_ros_test</name>
<version>0.1.0</version>
<description>
qt_ros_test
</description>
<maintainer email="[email protected]">robot</maintainer>
<author>robot</author>
<license>BSD</license>
<!-- <url type="bugtracker">https://github.com/stonier/qt_ros/issues</url> -->
<!-- <url type="repository">https://github.com/stonier/qt_ros</url> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>opencv2</build_depend>
<run_depend>opencv2</run_depend>
<build_depend>qt_build</build_depend>
<build_depend>roscpp</build_depend>
<build_depend>libqt4-dev</build_depend>
<run_depend>qt_build</run_depend>
<run_depend>roscpp</run_depend>
<run_depend>libqt4-dev</run_depend>
<build_depend>cv_bridge</build_depend>
<run_depend>cv_bridge</run_depend>
<build_depend>std_msgs</build_depend>
<run_depend>std_msgs</run_depend>
<build_depend>image_transport</build_depend>
<run_depend>image_transport</run_depend>
</package>
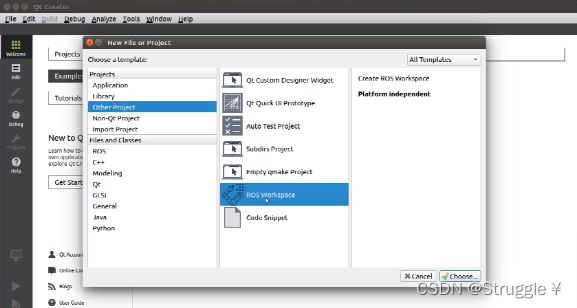
三、打开QTCreator
- 创建完rou_qt的包之后,打开QtCreator4.9.2,如下界面,然后选择ROS workspace
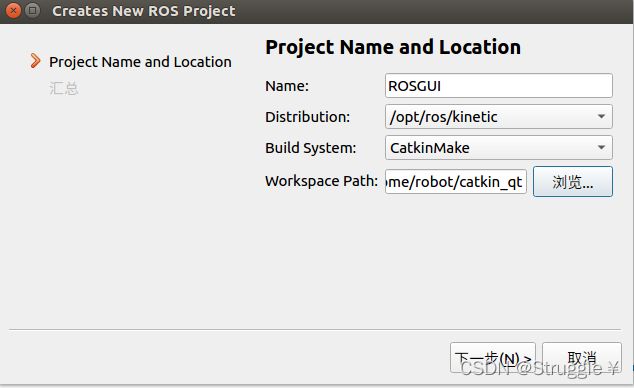
- Name可以随意命名;Build System:改为Catkin_make编译模式;Workspace Path选择刚才建立的总ROS工作空间catkin_qt。
- 打开界面如下图所示:
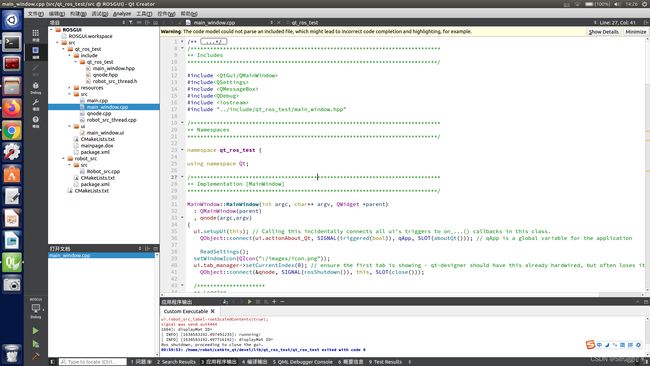
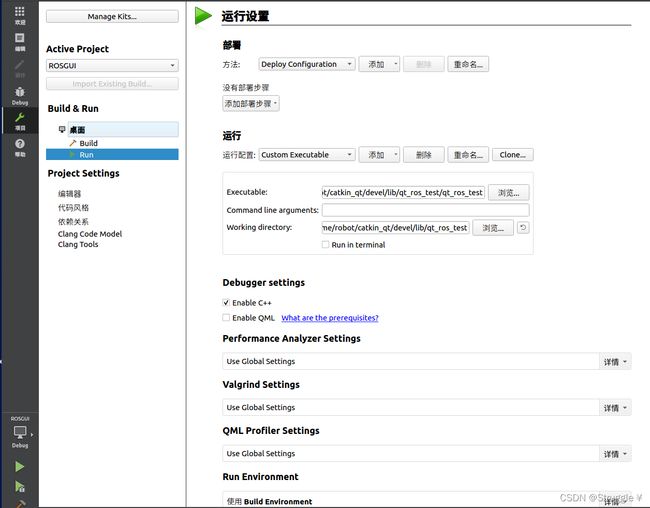
由于已经编译过ROS工作空间,所以节点已经存在,Qt想要运行,必须选择要运行的节点 - 项目->RUN->运行,配置运行配置为Custom Executable,可执行文件Executable选择编译好的节点,工作,目录Working directory就选择节点的上一级目录即可
- 在终端运行节点,初始化话题,然后qnode.cpp里接收话题
五、程序细节
main_window.hpp
这个文件是main_window.cpp的头文件,里面编写关于界面显示的一切声明。下面的代码是部分代码,主要都是我添加的一些代码,创建项目自动生成的我没有呈现出来。
//******************头文件部分**********************//
#include main_window.cpp
界面的实现函数,也是信号与槽的绑定之处。
信号与槽函数的绑定
/*********************
** 鼠标事件
**********************/
QObject::connect(this,SIGNAL(sendMessageSignal(QString)),this,SLOT(receiveMessageSLOT(QString)));
this->setMouseTracking(true);
ui.Grasp_Interaction_label->setAttribute(Qt::WA_TransparentForMouseEvents,true);
QObject::connect(this,SIGNAL(sendMessageSignalX(qint16)),&qnode,SLOT(receiveX(qint16)));
QObject::connect(this,SIGNAL(sendMessageSignalY(qint16)),&qnode,SLOT(receiveY(qint16)));
/*********************
**实时画面的显示
**********************/
QObject::connect(&qnode,SIGNAL(imageSignal(cv::Mat)),this,SLOT(displayMat(cv::Mat)),Qt::BlockingQueuedConnection);
QObject::connect(ui.RobotCamera_pushButton,SIGNAL(clicked(bool)),this,SLOT(openstread()));
QObject::connect(&qnode,SIGNAL(imageSignal2(cv::Mat)),this,SLOT(displayMat2(cv::Mat)),Qt::BlockingQueuedConnection);
QObject::connect(ui.Semantic_Segmentation_pushButton,SIGNAL(clicked(bool)),this,SLOT(openstread2()));
QObject::connect(&qnode,SIGNAL(imageSignal_seg_results(cv::Mat)),this,SLOT(displayMat_seg_results(cv::Mat)),Qt::BlockingQueuedConnection);
QObject::connect(ui.Segmentation_result_pushButton,SIGNAL(clicked(bool)),this,SLOT(openstread2()));
/*********************
** 按钮按下,This is an offic room 显示
**********************/
QObject::connect(ui.Scene_classication_pushButton,SIGNAL(clicked(bool)),this,SLOT(scene_classication()));//scene classication
/*********************
** 摄像头检测到的抓取结果显示,
**********************/
QObject::connect(&qnode,SIGNAL(imageSignal_grasp_results(cv::Mat)),this,SLOT(displayMat_grasp_results(cv::Mat)),Qt::BlockingQueuedConnection);
这里要说一个知识点,在connect的过程中,如果要显示的图像是一帧一帧的接收,就需要Qt::BlockingQueuedConnection放置信号和槽堵塞。
槽函数的编写
/*****************************************************************************
** 点击按钮,显示This is an Office Room在LineEdit上,这里编写了一个延时三秒的延时函数
*****************************************************************************/
void MainWindow::scene_classication(){
//延时部分
QDateTime old_time = QDateTime::currentDateTime();
QDateTime new_time;
do {
new_time = QDateTime::currentDateTime();
}while(old_time.secsTo(new_time) <= 3);
//延时部分
ui.Scene_classification_lineEdit->setText("This is an Office Room");
ui.Scene_classification_lineEdit->setStyleSheet("color:green");//文字颜色
ui.Scene_classification_lineEdit->setFont(QFont("Timers" , 25 ,QFont::Bold));//字体大小,加粗样式
}
/*****************************************************************************
** 通过按钮控制子线程开启,但qnode在ROS Master启动之后,就自动启动了子线程,因此这个槽函数无用
*****************************************************************************/
void MainWindow::openstread(){
qnode.start();
qDebug()<<"qnode.start()";
}
void MainWindow::openstread2(){
qnode.start();//open children thread
}
/*****************************************************************************
** 图像显示槽函数,这是在Qt中标准显示opencv图像的函数,需要与信号绑定
*****************************************************************************/
void MainWindow::displayMat(cv::Mat image)
{
cv::Mat rgb;
qDebug() << "displayMat ID=" << QThread::currentThread();
QImage img;
if(image.channels()==3)
{
//cvt Mat BGR 2 QImage RGB
cv::cvtColor(image,rgb,CV_BGR2RGB);
img =QImage((const unsigned char*)(rgb.data),
rgb.cols,rgb.rows,
rgb.cols*rgb.channels(),
QImage::Format_RGB888);
qDebug()<<"cvt Mat BGR 2 QImage RGB";
}
else
{
img =QImage((const unsigned char*)(image.data),
image.cols,image.rows,
image.cols*image.channels(),
QImage::Format_RGB888);
qDebug()<<"cvt Mat BGR 2 QImage RGB";
}
ui.Robot_camera_label->setPixmap(QPixmap::fromImage(img));//image_label就是你添加的label的对象名
ui.Robot_camera_label->setScaledContents(true);
qDebug()<<"ui.robot_src_label->setScaledContents(true);";
}
void MainWindow::displayMat2(cv::Mat image)
{
cv::Mat rgb;
qDebug() << "displayMat2 ID=" << QThread::currentThread();
ROS_INFO( "displayMat2 ID=");
QImage img;
qDebug()<<"receive out success!!";
if(image.channels()==3)
{
//cvt Mat BGR 2 QImage RGB
cv::cvtColor(image,rgb,CV_BGR2RGB);
img =QImage((const unsigned char*)(rgb.data),
rgb.cols,rgb.rows,
rgb.cols*rgb.channels(),
QImage::Format_RGB888);
qDebug()<<"cvt Mat BGR 2 QImage RGB";
}
else
{
img =QImage((const unsigned char*)(image.data),
image.cols,image.rows,
image.cols*image.channels(),
QImage::Format_RGB888);
qDebug()<<"cvt Mat BGR 2 QImage RGB";
}
ui.Semantic_segmentation_label->setPixmap(QPixmap::fromImage(img));//image_label就是你添加的label的对象名
ui.Semantic_segmentation_label->setScaledContents(true);
}
void MainWindow::displayMat_seg_results(cv::Mat image)
{
cv::Mat rgb;
qDebug() << "displayMat_seg_results ID=" << QThread::currentThread();
QImage img;
if(image.channels()==3)
{
//cvt Mat BGR 2 QImage RGB
cv::cvtColor(image,rgb,CV_BGR2RGB);
img =QImage((const unsigned char*)(rgb.data),
rgb.cols,rgb.rows,
rgb.cols*rgb.channels(),
QImage::Format_RGB888);
qDebug()<<"cvt Mat BGR 2 QImage RGB";
}
else
{
img =QImage((const unsigned char*)(image.data),
image.cols,image.rows,
image.cols*image.channels(),
QImage::Format_RGB888);
qDebug()<<"cvt Mat BGR 2 QImage RGB";
}
ui.Segmentation_result_label->setPixmap(QPixmap::fromImage(img));//image_label就是你添加的label的对象名
ui.Segmentation_result_label->setScaledContents(true);
qDebug()<<"ui.robot_src_label->setScaledContents(true);";
}
void MainWindow::displayMat_grasp_results(cv::Mat image)
{
cv::Mat rgb;
qDebug() << "displayMat_seg_results ID=" << QThread::currentThread();
QImage img;
if(image.channels()==3)
{
//cvt Mat BGR 2 QImage RGB
cv::cvtColor(image,rgb,CV_BGR2RGB);
img =QImage((const unsigned char*)(rgb.data),
rgb.cols,rgb.rows,
rgb.cols*rgb.channels(),
QImage::Format_RGB888);
qDebug()<<"cvt Mat BGR 2 QImage RGB";
}
else
{
img =QImage((const unsigned char*)(image.data),
image.cols,image.rows,
image.cols*image.channels(),
QImage::Format_RGB888);
qDebug()<<"cvt Mat BGR 2 QImage RGB";
}
ui.Grasp_Interaction_label->setPixmap(QPixmap::fromImage(img));//image_label就是你添加的label的对象名
ui.Grasp_Interaction_label->setScaledContents(true);
qDebug()<<"ui.robot_src_label->setScaledContents(true);";
}
/*****************************************************************************
** 接收Q_EMIT sendMessageSignal(sendMsg),将坐标以字符串的形式显示在label上
*****************************************************************************/
void MainWindow::receiveMessageSLOT(QString str1){
qDebug()<<"receiveMessageSLOT";
ui.pixel_label->setText(str1);
}
/*****************************************************************************
** 鼠标移动事件,this->setMouseTracking(true)是设置鼠标移动时也可以出发mouseMoveEvent函数
*****************************************************************************/
void MainWindow::mouseMoveEvent(QMouseEvent *event){
//event->x()就是得到鼠标移动时的x坐标
QString sendMsg = "(" + QString::number(1*((event->x())-490)) + "," + QString::number(1*((event->y())-510)) + ")";
if(!sendMsg.isEmpty())
{
qDebug()<<"sendMsg is not Empty";
Q_EMIT sendMessageSignal(sendMsg);
}
else
{
qDebug()<<"sendMsg.isEmpty";
}
}
/*****************************************************************************
** 鼠标按下事件,注意是右键按下!
*****************************************************************************/
void MainWindow::mousePressEvent(QMouseEvent *event){
int x = int(1.33*((event->x())-490-13)); //-490-13就是根据显示label在Qt界面中的相对位置计算了
int y = int(1.65*((event->y())-510+48));
//1.33 is width scale 代表的是显示图像的label和真实图像之间的宽度比例,因为我要映射到真实图像中
//1.65 is height scale 代表的是显示图像的label和真实图像之间的高度比例,因为我要映射到真实图像中
QString sendMsg = "(" + QString::number(x) + "," + QString::number(y) + ")";
qDebug()<<"x = "<<x;
qDebug()<<"y = "<<y;
if(!sendMsg.isEmpty())
{
qDebug()<<"sendMsg is not Empty";
Q_EMIT sendMessageSignal(sendMsg);
Q_EMIT sendMessageSignalX(x);//将鼠标按下得到的X坐标,发出去,qt中发送int类型需要是qint
Q_EMIT sendMessageSignalY(y);//将鼠标按下得到的X坐标,发出去,qt中发送int类型需要是qint
}
else
{
qDebug()<<"sendMsg.isEmpty";
}
}
/*****************************************************************************
** 鼠标释放事件
*****************************************************************************/
void MainWindow::mouseReleaseEvent(QMouseEvent *event){
qDebug()<<"event->pos() = "<<event->pos();
}
== 鼠标事件不需要链接槽函数,只需要声明+实现就可以。==
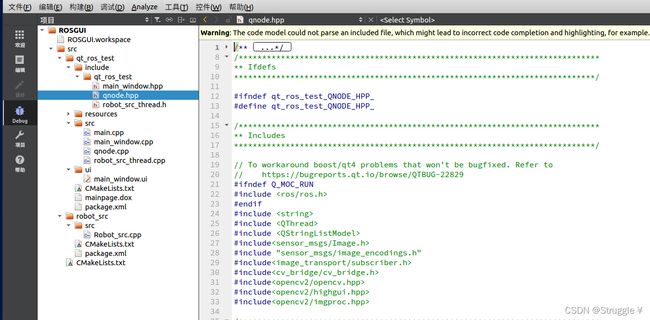
qnode.hpp
这个文件是,QT与ROS结合开发时,在QT中管理ROS节点的声明、发布、订阅的声明文件。与之配对的是qnode.cpp文件。
//******************头文件部分**********************//
#ifndef Q_MOC_RUN
#include qnode.cpp
这个文件是QT与ROS之间的桥梁,管理着ROS中节点的初始化,订阅发布等一系列操作。而且QNode继承自QThread,所以可以重写run函数,实现多线程的编程。
//******************头文件部分**********************//
#include 回调函数的编写
void QNode::myCallback_img(const sensor_msgs::ImageConstPtr &msg)
{
cv::Mat grasp_result_image = cv::imread("/home/robot/catkin_ws/src/grasp/scripts/2.jpg");
qDebug()<<"cv_bridge::CvImagePtr cv_ptr";
cv_bridge::CvImagePtr cv_ptr;
try
{ /*change to CVImage*/
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);//将ros::sensor_msgs转为opencv格式
img = cv_ptr->image;//转为opencv图像格式
if(img.empty())
{
qDebug()<<"img is empty";
}
Q_EMIT imageSignal(img) ; //将图像发出去,由于是循环执行回调函数,所以会一直发送图像
if(!grasp_result_image.empty()){
Q_EMIT imageSignal_grasp_results(grasp_result_image);
qDebug()<<"grasp_result_image is not empty";
}else {
qDebug()<<"grasp_result_image is empty";
}
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("Could not convert from '%s' to 'bgr8'.", msg->encoding.c_str());
}
}
void QNode::myCallback_img2(const sensor_msgs::ImageConstPtr &msg)
{
cv::Mat grasp_result_image = cv::imread("/home/robot/catkin_ws/src/grasp/scripts/1.png");
cv_bridge::CvImagePtr cv_ptr;
try
{ /*change to CVImage*/
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
img2 = cv_ptr->image;//呼应public中的img 啊!
if(img2.empty()){
qDebug()<<"img is empty";
}
Q_EMIT imageSignal2(img2) ; //将信号发出去
if(!grasp_result_image.empty()){
Q_EMIT imageSignal_grasp_results(grasp_result_image);
qDebug()<<"grasp_result_image is not empty";
}else {
qDebug()<<"grasp_result_image is empty";
}
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("Could not convert from '%s' to 'bgr8'.", msg->encoding.c_str());
}
}
//从QT主界面接收到的X坐标值
void QNode::receiveX(qint16 x){
int xx = x;
qDebug()<<"xx = "<<xx;
std_msgs::Int16 pixel_x_msgs;
pixel_x_msgs.data = xx;//将int类型的数据赋值给std_msgs::Int16类型的消息数据
pixel_x_publisher.publish(pixel_x_msgs);//将消息发送出去
qDebug()<<"x is sending";
}
void QNode::receiveY(qint16 y){
int yy = y;
qDebug()<<"yy = "<<yy;
std_msgs::Int16 pixel_y_msgs;
pixel_y_msgs.data = yy;
pixel_y_publisher.publish(pixel_y_msgs);
qDebug()<<"y is sending";
}
void QNode::myCallback_img_seg_results(const sensor_msgs::ImageConstPtr &msg)
{
qDebug()<<"signal was send out1111";
cv_bridge::CvImagePtr cv_ptr;
try
{ /*change to CVImage*/
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
img_seg_results = cv_ptr->image;//呼应public中的img 啊!
if(img_seg_results.empty()){
qDebug()<<"img is empty";
}
Q_EMIT imageSignal_seg_results(img_seg_results) ; //将信号发出去
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("Could not convert from '%s' to 'bgr8'.", msg->encoding.c_str());
}
}
void QNode::myCallback_img_grasp_results(const sensor_msgs::ImageConstPtr &msg)
{
qDebug()<<"signal was send out1111";
cv_bridge::CvImagePtr cv_ptr;
try
{ /*change to CVImage*/
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
img_grasp_results = cv_ptr->image;//呼应public中的img 啊!
if(img_seg_results.empty()){
qDebug()<<"img is empty";
}
Q_EMIT imageSignal_grasp_results(img_grasp_results) ; //将信号发出去
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("Could not convert from '%s' to 'bgr8'.", msg->encoding.c_str());
}
}
将相机话题中的图像消息转为opencv图像格式,再转为ROS消息发送个QT
先说明一下,我为什么要做这件事!由于本项目所用的相机为RGBD相机,该相机的SDK内部集成了ROS通信部分。相机会将图像画面发送到某个话题 /camera/color/image_raw 上,本来以为QT可以直接接收这个话题的消息,然后在显示在QT界面上。但是,QT收不到这个话题。于是,我自己写了一个订阅者节点订阅 /camera/color/image_raw 上的数据,然后我通过QT间接的订阅我自己写的这个节点,但是依然订阅不到。我怀疑是消息类型的问题,所以编写了一个订阅发布同时存在的节点,即先订阅==/camera/color/image_raw==消息,然后转为解码为opencv格式的Mat图像,然后将Mat格式的图像编码为ROS中的消息,通过发布者发送到某个话题 /XUHONGBO 上,这时候QT就可以订阅这个话题 /XUHONGBO 了,就可以正常显示了。这个节点的代码如下:
#include 这是其中一种opencv-img转ros-msg的编码方式,还有很多种方式,但这个相机的消息只适用于这种方式。这也是试验了好久才成功的方式。因此记录下来!!!
sensor_msgs::ImagePtr img2msg = cv_bridge::CvImage(std_msgs::Header(),"bgr8",img).toImageMsg();
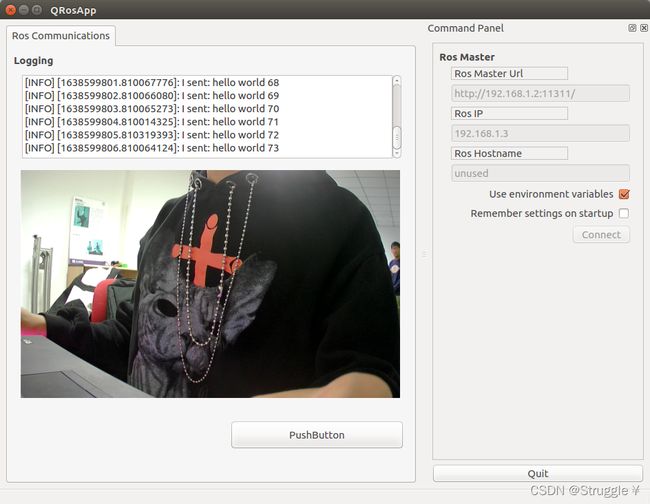
六、运行结果
要先运行节点,才可以显示视频流
七、错误总结
1、Bug-one
- Bug描述
QTCreator 编译错误:has_binary_operator.hpp:51: Parse error at “BOOST_JOIN”
- 原因
#ifndef Q_MOC_RUN
#include qnode.cpp文件中,#include
- 解决方案
找到has_binary_operator.hpp这个文件,本系统的路径为:/usr/include/boost/type_traits/has_binary_operator.hpp。然后修改51行和224行,分别加上条件编译即可。
51行
#ifndef Q_MOC_RUN
namespace BOOST_JOIN(BOOST_TT_TRAIT_NAME,_impl) {
#endif
224行
#ifndef Q_MOC_RUN
} // namespace boost
#endif
2、Bug-two
- Bug描述
use of undeclared identifier “MainWindow” 同时 use of undeclared identifier “qt_ros_test”
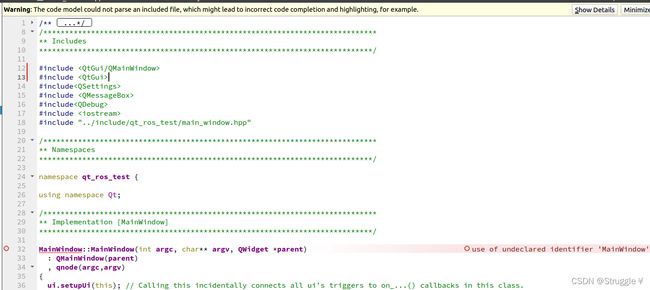

- 原因
采用自动创建的文件,在main.cpp和main_window.cpp文件中,头文件是#include < QtGui> ,所以会报错。
- 解决方案
将#include < QtGui>替换为#include
,问题解决。
3、Bug-three
- Bug描述
ubuntu调用usb摄像头出错
- 原因
没有安装驱动
- 解决方案
安装驱动
一、让系统可以识别到usb摄像头设备
打开终端,输入命令:ls /dev/v*,则可看到"/dev/video0",表示成功驱动摄像头。
如果没有的话,拔掉摄像头,重新插上。然后再输入命令:ls /dev/v*,则可看到。
输入命令:lsusb ,可以查看usb摄像头的型号。
二、安装应用程序显示摄像头捕捉到的视频
1)使用应用程序camorama
输入命令:sudo apt-get install camorama
安装完成后,在终端中输入命令:camorama,即可显示出视频信息;或在菜单“应用程序”中可以打开程序。
4、Bug-four
- Bug描述
QtVIDEOIO ERROR: V4L2: Pixel format of incoming image is unsupported by OpenCV
Unable to stop the stream: 设备或资源忙
- 原因
网上很多博客都说缺少v4l1compat.so,然后需要把v4l1compat.so添加到bashrc里,但是不适合我的项目。找了很久,发现我的子线程写错了
我这里采用的子线程方法是通过按钮,调用子线程下的槽函数startThread,然后调用run函数

- 解决方案
子线程的进入必须要start开启,否则子线程无法开启,于是我改动了线程方法,问题解决。

5、Bug-five
- Bug描述
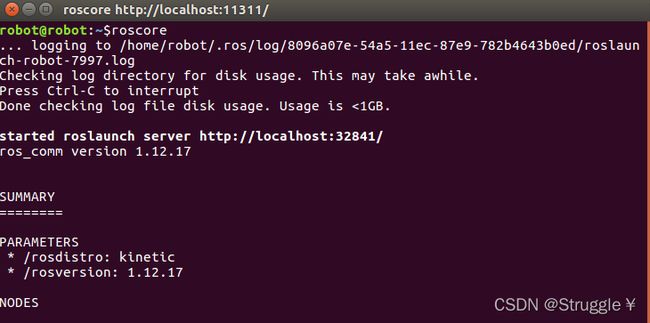
启动roscore时,报错:ImportError: No module named
defusedxml
- 原因
ROS依赖于python2,linux并且通过路径/usr/bin/python来指定默认的python版本,一旦该路径没有被设置,或者被设置为python3,就会出现以上错误。本例程是因为师姐换了python的路径,导致无法链接到python2。
- 解决方案
(1)删除原有链接
sudo rm -rf /usr/bin/python
(2)重新指定python2
sudo ln -s /usr/bin/python2 /usr/bin/python
(3)再次执行查看目前的python版本
ls -n /usr/bin/python
(4)修改之后的结果,可以看到-> /usr/bin/python2,指向的python2
lrwxrwxrwx 1 0 0 16 11月 13 23:46 /usr/bin/python -> /usr/bin/python2
(5)再次运行roscore
6、Bug-six
- Bug描述
‘cv::VideoCapture::isOpened() const’未定义的引用,这是在测试阶段,我通过OpenCV下的VideoCapture读取摄像头数据,结果已知报错,说找不到引用。
- 原因
这是因为ros_qt_test功能包的Cmakelist.txt里缺少OpenCV的库
- 解决方案
在ros_qt_test功能包的Cmakelist.txt中的find_package下添加OpenCV库即可
七、QT5和melodic配置时,CMakelist文件的编写
##############################################################################
# CMake
##############################################################################
cmake_minimum_required(VERSION 2.8.0)
project(qt_ros_gui_pkg)
set(CMAKE_INCLUDE_CURRENT_DIR ON)
##############################################################################
# Catkin
##############################################################################
# qt_build provides the qt cmake glue, roscpp the comms for a default talker
set(OpenCV_DIR /usr/share/OpenCV/)
find_package(catkin REQUIRED COMPONENTS
OpenCV
sensor_msgs
image_transport
std_msgs
cv_bridge
)
find_package(Qt5 REQUIRED Core Widgets)
set(QT_LIBRARIES Qt5::Widgets)
include_directories(${catkin_INCLUDE_DIRS})
# Use this to define what the package will export (e.g. libs, headers).
# Since the default here is to produce only a binary, we don't worry about
# exporting anything.
catkin_package()
##############################################################################
# Qt Environment
##############################################################################
#this comes from qt_build's qt-ros.cmake which is automatically
#included via the dependency call in package.xml
#rosbuild_prepare_qt4(QtCore QtGui) # Add the appropriate components to the component list here
##############################################################################
# Sections
##############################################################################
file(GLOB QT_FORMS RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} ui/*.ui)
file(GLOB QT_RESOURCES RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} resources/*.qrc)
file(GLOB_RECURSE QT_MOC RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS include/qt_ros_gui_pkg/*.hpp *.h)
QT5_ADD_RESOURCES(QT_RESOURCES_CPP ${QT_RESOURCES})
QT5_WRAP_UI(QT_FORMS_HPP ${QT_FORMS})
QT5_WRAP_CPP(QT_MOC_HPP ${QT_MOC})
##############################################################################
# Sources
##############################################################################
file(GLOB_RECURSE QT_SOURCES RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS src/*.cpp)
##############################################################################
# Binaries
##############################################################################
add_executable(qt_ros_gui_pkg ${QT_SOURCES} ${QT_RESOURCES_CPP} ${QT_FORMS_HPP} ${QT_MOC_HPP})
target_link_libraries(qt_ros_gui_pkg ${QT_LIBRARIES} ${catkin_LIBRARIES} )
install(TARGETS qt_ros_gui_pkg RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})
target_link_libraries(qt_ros_gui_pkg
/usr/lib/x86_64-linux-gnu/libtiff.so.5
/usr/lib/x86_64-linux-gnu/libgdal.so.20
/usr/lib/x86_64-linux-gnu/libsqlite3.so.0
)
message(STATUS "OpenCV_INCLUDE_DIRS ?" : ${OpenCV_INCLUDE_DIRS})
message(STATUS "OpenCV_VERSION ?" : ${OpenCV_VERSION})
message(STATUS "OpenCV_LIB ?" : ${OpenCV_LIBS})
message(STATUS "OpenCV_CONGIG_PATH ?" : ${OpenCV_CONFIG_PATH})
其中,让我困扰了很久的地方:
target_link_libraries(qt_ros_gui_pkg
/usr/lib/x86_64-linux-gnu/libtiff.so.5
/usr/lib/x86_64-linux-gnu/libgdal.so.20
/usr/lib/x86_64-linux-gnu/libsqlite3.so.0
)
先是缺tiff库,导入进来之后,缺libgdal的库,再导入进来之后,对sqlite3中的东西未定义,所以把sqlite3的库导入进来,结果就成了!!所以遇到这种问题,只需要一步一步的看报错点,然后一点一点的试验就可以了。
八、参考文章
ROS:两个节点同时具有发布和订阅图像信息的功能
QT中的多线程编程
ROS学习记录3——创建一个节点
ROS Qt5 librviz人机交互界面开发一(配置QT环境)
ROS学习–第3篇:ROS基础—创建工作空间
QTCreator 编译错误:has_binary_operator.hpp:51: Parse error at “BOOST_JOIN”
ubuntu 使用USB摄像头
QT信号槽连接之不同线程之间的信号槽连接方式
ImportError: No module named defusedxml