强化学习之入门笔记(二)
文章目录
- 强化学习
-
- 一、Qlearning算法
-
- Qlearning
-
- TD之于Q值估算
- 麻烦来了
- SARSA
- Qlearning
- 二、深度强化学习
- 三、DQN
-
- Deep network + Qlearning = DQN
- 神经网络的目标
- 四、Policy Gradient
-
- 策略梯度(Policy Gradient)
- 直观感受PG算法
- 五、Actor-Critic
-
-
- 什么是AC
- TD-error
-
- 参考
强化学习
一、Qlearning算法
Qlearning
使用TD(0)预估状态价值:

图解:

但大家可能会说,TD能够用在V值,那能不能用在计算Q值上呢?答案是肯定的。
TD之于Q值估算
我们现在用上TD的思路。 我们在St,智能体Agent根据策略pi,选择动作At,进入St+1状态,并获得奖励R

V(St+1)的意义是,在St+1到最终状态获得的奖励期望值。 Q(St,At)的意义是,在Q(St,At)到最终状态获得的奖励期望值。 所以我们可以把V(St+1)看成是下山途中的一个路牌,这个路牌告诉我们下山到底还有多远,然后加上R这一段路,就知道Q(St,At)离山脚有多长的路
麻烦来了
但在实际操作的时候,会有一个问题。 在这里我们要估算两个东西,一个是V值,一个是Q值。
人们想出的办法就是,用下一个动作的Q值,代替V值。
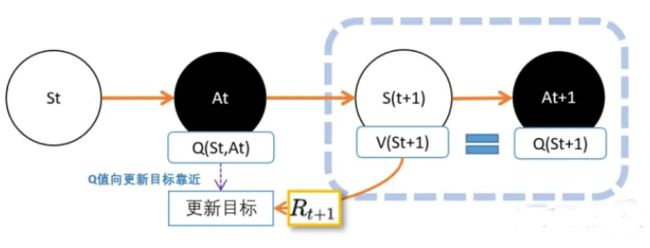
因为从状态St+1到动作At+1之间没有奖励反馈,所以我们直接用At+1的Q价值,代替St+1的V价值。 这样不就是可以了吗?
关键是:马可洛夫链不是链,是树
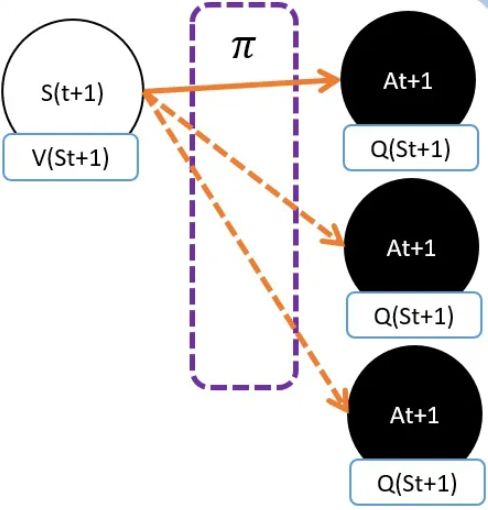
在St+1下,可能有很多动作At+1。不同动作的Q值自然是不同的。 所以Q(St+1,At+1)并不能等价于V(St+1)
虽然不相等,但不代表不能用其中一个来代表V(St+1)。人们认为有个可能的动作产生的Q值能够一定程度代表V(St+1)
- 在相同策略下产生的动作At+1。这就是SARSA
- 选择能够产生最大Q值的动作At+1。这就是Qlearning
SARSA
为什么SARSA用相同策略下产生的动作At+1是合理的?答案很简单,它管用

S A R S A : Q ( S , A ) ← Q ( S , A ) + α [ R + γ Q ( S ′ , A ′ ) − Q ( S , A ) ] SARSA: Q(S,A)\leftarrow Q(S,A)+\alpha [R+\gamma Q(S',A')-Q(S,A)] SARSA:Q(S,A)←Q(S,A)+α[R+γQ(S′,A′)−Q(S,A)]
这里的At+1是在同一策略产生的。也就是说,St选At的策略和St+1选At+1是同一个策略。这也是SARSA和Qlearning的唯一区别
Qlearning
Qlearning能够产生最大Q值的动作At+1的Q值作为V(St+1)的替代

我们要寻找的是能够获得最多奖励的动作,Q值就代表我们能够获得今后奖励的期望值
Q l e a r n i n g : Q ( S , A ) ← Q ( S , A ) + α [ R + γ m a x a Q ( S ′ , a ) − Q ( S , A ) ] S A R S A : Q ( S , A ) ← Q ( S , A ) + α [ R + γ Q ( S ′ , A ′ ) − Q ( S , A ) ] Qlearning:Q(S,A)\leftarrow Q(S,A)+\alpha [R+\gamma max_{a}Q(S',a)-Q(S,A)]\\ SARSA: Q(S,A)\leftarrow Q(S,A)+\alpha [R+\gamma Q(S',A')-Q(S,A)] Qlearning:Q(S,A)←Q(S,A)+α[R+γmaxaQ(S′,a)−Q(S,A)]SARSA:Q(S,A)←Q(S,A)+α[R+γQ(S′,A′)−Q(S,A)]
- Qlearning和SARSA都是基于TD(0)的,我们用TD(0)估算状态的V值。而Qlearning和SARSA估算的是动作的Q值。
- Qlearning和SARSA的核心原理,是用下一个状态St+1的V值,估算Q值
- 既要估算Q值,又要估算V值会显得比较麻烦,所以我们用下一状态下的某一个动作的Q值,来代表St+1的V值
- Qlearning和SARSA唯一的不同,就是用什么动作的Q值替代St+1的V值
- SARSA 选择的是在St同一个策略产生的动作
- Qlearning 选择的是能够产生最大的Q值的动作
二、深度强化学习
为什么深度强化学习这么强,是因为深度强化学习增加了一个很强的武器——深度神经网络
函数其实也很简单,就是描述两个东西的对应关系。F(x) = y , 描述的就是x和y之间的关系。
以前的函数,需要我们去精心设计的,要设计,就要描述其中的关系。但有些东西我们明明知道他们有关系,但又不好描述清楚
例如,手写数字识别,一个正常人写的数字8,我们人类都能认出来。但我们却描述不出来,我们知道是两个圈是8,但有些人的圈明明不闭合,我们也认得出是8…
但深度神经网络这个工具就能自己学会这些关系,它是怎样做的呢?

我们要学习一个神奇函数Maigic(),辨别手写数字,也就是输入一张8的图,输出这个数字是什么
- 我们先设一个Magic’(X),其中的X就是输入的图片;
- 计算结果是各个数字的概率,这个判断一开始通常都是错的,但没关系,我们会慢慢纠正它。
- 纠正就需要有一个目标,没有目标就没有对错了。这里的目标是我们人类给他们标注的,告诉Magic’:这玩意儿是数字8
- 目标和现实的输出总是有一段距离的,这段距离我们称为损失(loss).
- 我们调整我们Magic’函数的参数,让损失最小化。也就是说,离目标越来越近。
最后你就发现Magci’函数的功能离我们心目中要找的Magci函数越来越近。
想要进一步了解深度神经网络,请参考文章:一篇文章入门pytorch和深度学习
三、DQN
Deep network + Qlearning = DQN
Qleanrning有一个问题:只能解决格子类型离散型状态问题,对连续型状态束手无策
在Qlearning中,我们有一个Qtable,记录着在每一个状态下,各个动作的Q值
Qtable的作用是当我们输入状态S,我们通过查表返回能够获得最大Q值的动作A,也就是我们需要找一个S-A的对应关系
这种方式很适合格子游戏,因为格子游戏中的每一个格子就是一个状态,但在现实生活中,很多状态并不是离散而是连续的
我们刚才说了,Qtable的作用就是找一个S-A的对应关系,所以我们就可以用一个函数F表示,我们有F(S)=A,这样我们就不用查表了,而且还有一个好处,函数允许连续状态的表示
这时,我们的深度神经网络就可以派上用场了,我们可以将神经网络看成一个万能的函数。这个万能函数接收输入一个状态S,它能告诉我,每个动作的Q值是怎样的
把Qtable三维可视化,就会得到这样一个图:

图中每根柱子的高度,表示状态S下,选择动作A的Q值
现在我们用函数来表示,相当于我们要扭曲一条曲线,这条曲线穿过了离散状态下的所有点
我们从二维的角度再看一下:
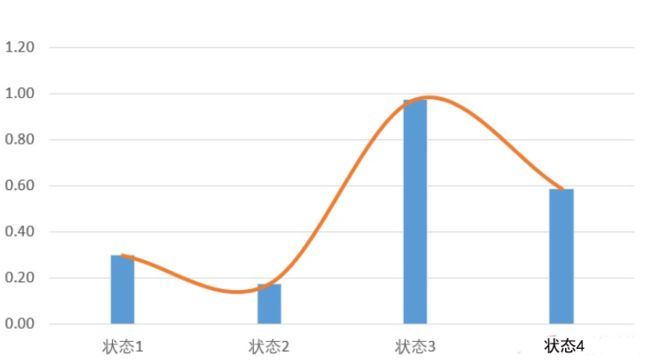
所以现在我们不但可以取状态3和状态4,我们还可以取状态3.5的Q值
现在我们就清楚了,其实Qlearning和DQN并没有根本的区别,只是DQN使用神经网络,也就是一个函数替代了原来的Qtable而已
神经网络的目标
神经网络需要解决一个目标,就是更新目标如何设置
在手写数字识别等有监督学习的数据集中,有标签好的数据,也就是我们的目标是很明确的。那么在DQN中,我们的目标是什么呢?
在Qlearning中,我们用下一个状态St+1的最大Q值替代St+1的V值。V(St+1)加上状态转移产生的奖励R,就是Q(S,a)的更新目标
我们来看下图:

假设我们需要更新当前状态St下的某动作A的Q值Q(S,A),我们可以这样做
- 执行A,往前一步,到达St+1
- 把St+1输入Q网络,计算St+1下所有动作的Q值
- 获得最大的Q值加上奖励R作为更新目标
- 计算损失
- Q(S,A)相当于有监督学习中的logits
- maxQ(St+1)+R相当于监督学习中的labels
- 用mse函数,得出两者的loss
- 用loss更新Q网络
也就是,我们用Q网络估算出来的两个相邻状态的Q值,他们之间的距离,就是一个r的距离
D Q N 更新: Q ( S , A ) ← Q ( S , A ) + α [ R + γ m a x a Q ( S ′ , a ) − Q ( S , A ) ] DQN更新:Q(S,A)\leftarrow Q(S,A)+\alpha[R+\gamma max_{a}Q(S',a)-Q(S,A)] DQN更新:Q(S,A)←Q(S,A)+α[R+γmaxaQ(S′,a)−Q(S,A)]
- 其实DQN就是Qlearning扔掉Qtable,换上深度神经网络
- 我们知道,解决连续型问题,如果表格不能表示,就用函数,而最好的函数就是深度神经网络
- 和有监督学习不同,深度强化学习中,我们需要自己找更新目标。通常在马尔科夫链体系下,两个相邻状态之间的奖励R能够用来求loss
四、Policy Gradient
学到这里,我们先回顾一下,我们是怎样从0到DQN的
一开始,我们对这个世界一无所知。我们发现我们每走一步,都有一个reward,我们希望我们能够获得更多的reward,所以我们在每个状态或者动作都做上记录,希望统计一下,从这个state出发,我能获得多少奖励,这样我们就可以知道我们应该走哪条路。
于是,我们从动态规划到蒙地卡罗,到TD到Qleaning再到DQN,一路为计算Q值和V值绞尽脑汁。但大家有没有发现,我们可能走上一个固定的思维,就是我们的学习,一定要算Q值和V值。
但算Q值和V值并不是我们最终目的呀,我们要找一个策略,能获得最多的奖励。我们可以抛弃掉Q值和V值么?
答案是,可以,策略梯度(Policy Gradient)算法就是这样以一个算法。
策略梯度(Policy Gradient)
如果说DQN是一个TD+神经网络的算法,那么PG是一个蒙地卡罗+神经网络的算法
在神经网络出现之前,当我们遇到非常复杂的情况时,我们很难描述,我们遇到每一种状态应该如何应对
但现在我们有了神经网络这么强大的武器,我们就可以用一个magic函数直接代替我们想要努力描述的规则
我们用pi表示策略,也就是动作的分布。那么我们期望有这么一个magic函数,当我输入state的时候,他能输出pi,告诉智能体这个状态,应该如何应对:pi = magic(state)
如果智能体的动作是对的,那么就让这个动作获得更多被选择的几率;相反,如果这个动作是错的,那么这个动作被选择的几率将会减少
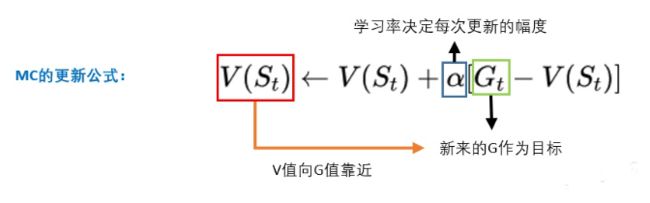
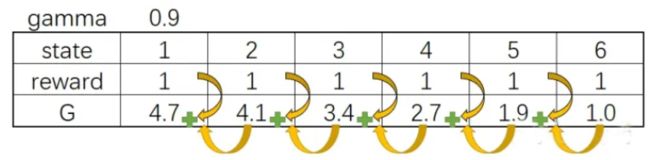
我们先来复习一下蒙地卡罗
我们从某个state出发,然后一直走,直到最终状态。然后我们从最终状态原路返回,对每个状态评估G值
所以G值能够表示在策略pi下,智能体选择的这条路径的好坏
直观感受PG算法
我们先用数字,直观感受一下PG算法
从某个state出发,可以采取三个动作
假设当前智能体对这一无所知,那么,可能采取平均策略 0 = [33%,33%,33%]
智能体出发,选择动作A,到达最终状态后开始回溯,计算得到 G = 1

我们可以更新策略,因为该路径选择了A而产生的,并获得G = 1;因此我们要更新策略:让A的概率提升,相对地,BC的概率就会降低。 计算得新策略为: 1 = [50%,25%,25%]
虽然B概率比较低,但仍然有可能被选中,第二轮刚好选中B
智能体选择了B,到达最终状态后回溯,计算得到 G = -1
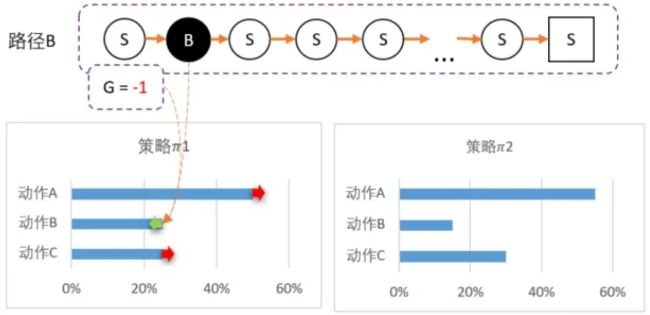
所以我们对B动作的评价比较低,并且希望以后会少点选择B,因此我们要降低B选择的概率,而相对地,AC的选择将会提高
计算得新策略为: 2 = [55%,15%,30%]
最后随机到C,回溯计算后,计算得G = 5
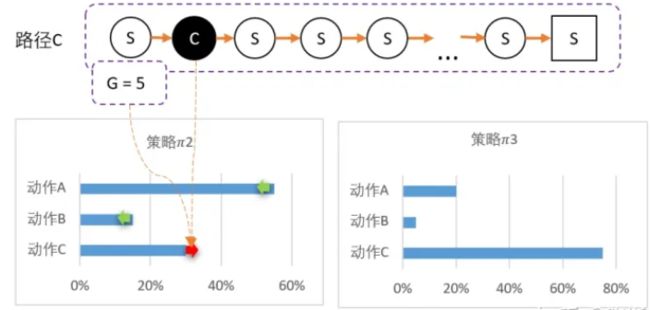
C比A还要多得多。因此这一次更新,C的概率需要大幅提升,相对地,AB概率降低,3 = [20%,5%,75%]
当然,以上的例子数值上是不严谨的和精确的
PG的基本思想:直接用神经网络magic(s)=a
PG用的是MC的G值来更新网络,也就是说,PG会让智能体一直走到最后,然后通过回溯计算G值
于是得到S - A - G 的数据,这里的G就是对于状态S,选择了A的评分
- 如果G值正数,那么表明选择A是正确的,我们希望神经网络输出A的概率增加(鼓励)
- 如果G是负数,那么证明这个选择不正确,我们希望神经网络输出A概率减少(惩罚)
- 而G值的大小,就相当于鼓励和惩罚的力度了
五、Actor-Critic
现在,我们终于开始学习顶顶大名的Actor-Critic了!
我们知道,MC的效率是相对比较低的,因为需要一直走到最终状态。所以我们希望用TD代替MC
什么是AC
关于AC,很多书籍和教程都说AC是DQN和PG的结合。个人觉得道理是怎么个道理,但其实是不够清晰,也很容易产生误读,甚至错误理解AC
PG利用带权重的梯度下降方法更新策略,而获得权重的方法是蒙地卡罗计算G值
蒙地卡罗需要完成整个游戏过程,直到最终状态,才能通过回溯计算G值,这使得PG方法的效率被限制
那我们可不可以更快呢?相信大家已经想到了,那就是改为TD
但改为TD还有一个问题需要解决:在PG,我们需要计算G值;那么在TD中,我们应该怎样估算每一步的Q值呢?
有没有发现,其实这个问题我们在学DQN的时候也遇到过, 熟悉的套路:我们用上万能的神经网络解决
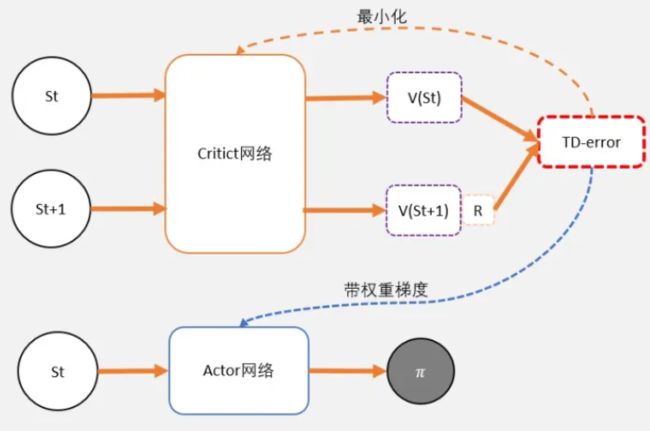
也就是说,Actor-Critic,其实是用了两个网络:
两个网络有一个共同点,输入状态S: 一个输出策略,负责选择动作,我们把这个网络成为Actor; 一个负责计算每个动作的分数,我们把这个网络成为Critic
大家可以形象地想象为,Actor是舞台上的舞者,Critic是台下的评委
Actor在台上跳舞,一开始舞姿并不好看,Critic根据Actor的舞姿打分。Actor通过Critic给出的分数,去学习:如果Critic给的分数高,那么Actor会增加这个动作的输出概率;相反,如果Critic给的分数低,那么就减少这个动作输出的概率
AC是TD版本的PG
TD-error
在DQN预估的是Q值,在AC中的Critic,估算的是V值
你可能会说,为什么不是Q值呢?说好是给动作评价呢
我们可以直接用network估算的Q值作为更新值,但效果会不太好
原因我们可以看下图:

假设我们用Critic网络,预估到S状态下三个动作A1,A2,A3的Q值分别为1,2,10
但在开始的时候,我们采用平均策略,于是随机到A1。于是我们用策略梯度的带权重方法更新策略,这里的权重就是Q值
于是策略会更倾向于选择A1,意味着更大概率选择A1,结果A1的概率就持续升高…
这就掉进了正数陷阱。我们明明希望A3能够获得更多的机会,最后却是A1获得最多的机会
这是为什么呢?
这是因为Q值用于是一个正数,如果权重是一个正数,那么我们相当于提高对应动作的选择的概率。权重越大,我们调整的幅度将会越大
其实当我们有足够的迭代次数,这个是不用担心这个问题的。因为总会有机会抽中到权重更大的动作,因为权重比较大,抽中一次就能提高很高的概率
但在强化学习中,往往没有足够的时间让我们去和环境互动。这就会出现由于运气不好,使得一个很好的动作没有被采样到的情况发生
要解决这个问题,我们可以通过减去一个baseline,令到权重有正有负。而通常这个baseline,我们选取的是权重的平均值。减去平均值之后,值就变成有正有负了
而Q值的期望(均值)就是V
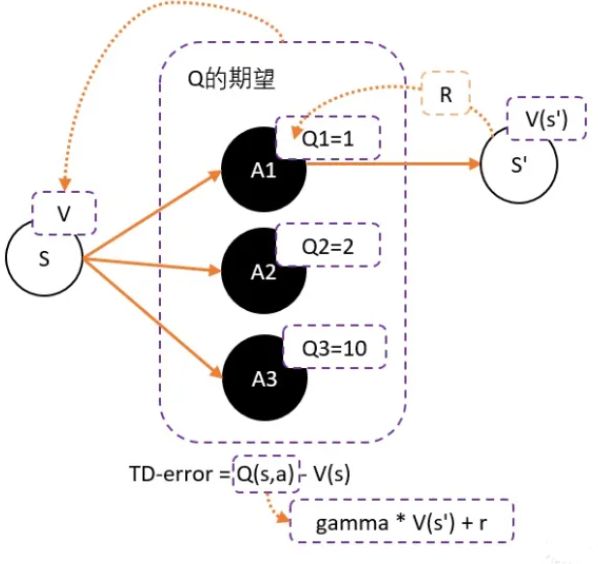
所以我们可以得到更新的权重:Q(s,a)-V(s)
随之而来的问题是,这就需要两个网络来估计Q和V了。但马尔科夫告诉我们,很多时候,V和Q是可以互相换算的
Q(s,a)用gamma * V(s’) + r 来代替,于是整理后就可以得到:
gamma * V(s’) + r - V(s) —— 我们把这个差,叫做TD-error
眼尖的同学可能已经发现,如果Critic是用来预估V值,而不是原来讨论的Q值。那么,这个TD-error是用来更新Critic的loss了
没错,Critic的任务就是让TD-error尽量小,然后TD-error给Actor做更新
现在我们再总结一下TD-error的知识:
- 为了避免正数陷阱,我们希望Actor的更新权重有正有负。因此,我们把Q值减去他们的均值V,Q(s,a)-V(s)
- 为了避免需要预估V值和Q值,我们希望把Q和V统一;由于Q(s,a) = gamma * V(s’) + r - V(s),所以我们得到TD-error公式: TD-error = gamma * V(s’) + r - V(s)
- TD-error就是Actor更新策略时候,带权重更新中的权重值
- 现在Critic不再需要预估Q,而是预估V。而根据马可洛夫链所学,我们知道TD-error就是Critic网络需要的loss,也就是说,Critic函数需要最小化TD-error
大家看,其实AC没有很难,关键是对TD-error的理解。理解了TD-error,就能串起Actor和Critic两者
参考
1、怎样直观理解Qlearning算法:https://zhuanlan.zhihu.com/p/110338833
2、三维可视化助你直观理解DQN算法[DQN理论篇]:https://zhuanlan.zhihu.com/p/110620815
3、如何理解策略梯度(Policy Gradient)算法:https://zhuanlan.zhihu.com/p/110881517
4、理解Actor-Critic的关键是什么:https://zhuanlan.zhihu.com/p/110998399