DFIG控制9: 搭建定子αβ坐标系下的电机模型
DFIG控制9: 搭建定子αβ坐标系下的电机模型。本文基于教程的第9部分(终于做完了)。主要目的是自己搭建一个DFIG的电机模型,与Simulink库中的模型做个对比。
本文基于教程的第9部分:
DFIM Tutorial 9 - Analytical Model of Doubly Fed Induction Generator for On-Line Simulation 主要目的是自己搭建一个DFIG的电机模型,与Simulink库中的模型做个对比。
教程使用的参考书:
G. Abad, J. Lopez, M. Rodriguez, L. Marroyo, and G. Iwanski, Doubly Fed Induction Machine: Modeling and Control for Wind Energy Generation. John Wiley & Sons, 2011.
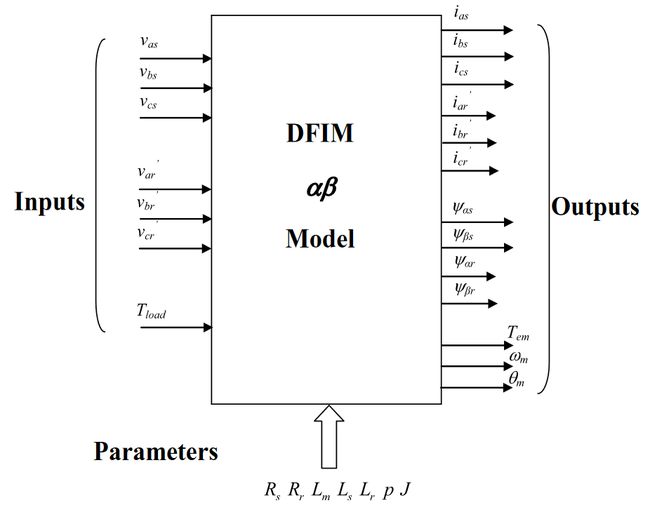
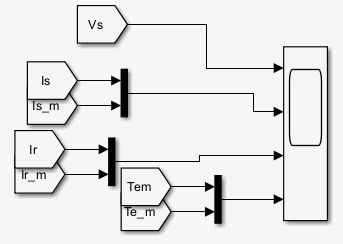
需要搭建的模型的框图如下:
理论部分
使用 DFIG控制10: 双馈发电机的动态模型 中推导的定子静止αβ坐标系下的电压和磁链方程:
{ u s α = R s i s α + d d t ψ s α u s β = R s i s β + d d t ψ s β u r α = R r i r α + d d t ψ r α + ω r ψ r β u r β = R r i r β + d d t ψ r β − ω r ψ r α \begin{cases} u_{s\alpha} &= R_si_{s\alpha}+\frac{d}{dt}\psi_{s\alpha}\\ u_{s\beta} &= R_si_{s\beta}+\frac{d}{dt}\psi_{s\beta}\\ u_{r\alpha} &= R_ri_{r\alpha}+\frac{d}{dt}\psi_{r\alpha}+\omega_r\psi_{r\beta}\\ u_{r\beta} &= R_ri_{r\beta}+\frac{d}{dt}\psi_{r\beta}-\omega_r\psi_{r\alpha} \end{cases} ⎩ ⎨ ⎧usαusβurαurβ=Rsisα+dtdψsα=Rsisβ+dtdψsβ=Rrirα+dtdψrα+ωrψrβ=Rrirβ+dtdψrβ−ωrψrα
{ ψ s α = ( 1.5 L m + L l s ) i s α + 1.5 L m i r α = L s i s α + L M i r α ψ s β = ( 1.5 L m + L l s ) i s β + 1.5 L m i r β = L s i s β + L M i r β ψ r α = ( 1.5 L m + L l r ) i r α + 1.5 L m i s α = L r i r α + L M i s α ψ r β = ( 1.5 L m + L l r ) i r β + 1.5 L m i s β = L r i r β + L M i s β \begin{cases} \psi_{s\alpha} &= (1.5L_m+L_{ls})i_{s\alpha}+1.5L_mi_{r\alpha} =L_si_{s\alpha}+L_Mi_{r\alpha}\\ \psi_{s\beta} &= (1.5L_m+L_{ls})i_{s\beta}+1.5L_mi_{r\beta} =L_si_{s\beta}+L_Mi_{r\beta}\\ \psi_{r\alpha} &= (1.5L_m+L_{lr})i_{r\alpha}+1.5L_mi_{s\alpha} =L_ri_{r\alpha}+L_Mi_{s\alpha}\\ \psi_{r\beta} &= (1.5L_m+L_{lr})i_{r\beta}+1.5L_mi_{s\beta} =L_ri_{r\beta}+L_Mi_{s\beta} \end{cases} ⎩ ⎨ ⎧ψsαψsβψrαψrβ=(1.5Lm+Lls)isα+1.5Lmirα=Lsisα+LMirα=(1.5Lm+Lls)isβ+1.5Lmirβ=Lsisβ+LMirβ=(1.5Lm+Llr)irα+1.5Lmisα=Lrirα+LMisα=(1.5Lm+Llr)irβ+1.5Lmisβ=Lrirβ+LMisβ
这里有4个关于磁链的微分方程,加上转矩和转子机械角频率的关系,模型共有5个微分方程。
写成矩阵形式,再消去电流,如下:
u = R i + d d t ψ + A ψ ψ = L i → d d t ψ = − ( R L − 1 + A ) ψ + u \begin{align*} \boldsymbol{u} &= \boldsymbol{R}\boldsymbol{i}+ \frac{d}{dt}\boldsymbol{\psi} +A\boldsymbol{\psi}\\ \boldsymbol{\psi} &= \boldsymbol{L}\boldsymbol{i}\\ \rightarrow \frac{d}{dt}\boldsymbol{\psi}&= -(\boldsymbol{R}\boldsymbol{L}^{-1}+\boldsymbol{A})\boldsymbol{\psi}+\boldsymbol{u} \end{align*} uψ→dtdψ=Ri+dtdψ+Aψ=Li=−(RL−1+A)ψ+u
其中,
R = [ R s 0 0 0 0 R r 0 0 0 0 R r 0 0 0 0 R r ] L = [ L s 0 L M 0 0 L s 0 L M L M 0 L r 0 0 L M 0 L r ] A = [ 0 0 0 0 0 0 0 0 0 0 0 ω r 0 0 − ω r 0 ] \begin{align*} \boldsymbol{R}&= \left[\begin{matrix} R_{s} &0 &0 &0 \\ 0 & R_{r} &0 &0\\ 0 &0 &R_{r} &0\\ 0 &0 &0 &R_{r} \end{matrix}\right]\\ \boldsymbol{L}&= \left[\begin{matrix} L_{s} &0 &L_{M} &0 \\ 0 & L_{s} &0 &L_{M}\\ L_{M} &0 &L_{r} &0\\ 0 &L_{M} &0 &L_{r} \end{matrix}\right]\\ \boldsymbol{A}&= \left[\begin{matrix} 0 &0 &0 &0 \\ 0 & 0 &0 &0\\ 0 &0 &0 &\omega_{r}\\ 0 &0 &-\omega_{r} &0 \end{matrix}\right] \end{align*} RLA= Rs0000Rr0000Rr0000Rr = Ls0LM00Ls0LMLM0Lr00LM0Lr = 00000000000−ωr00ωr0
并且令漏感系数为:
σ = 1 − L M 2 L s L r \sigma=1- \frac{L_{M}^{2}}{L_{s}L_{r}} σ=1−LsLrLM2
在MathCAD中计算 − ( R L − 1 + A ) -(\boldsymbol{R}\boldsymbol{L}^{-1}+\boldsymbol{A}) −(RL−1+A):
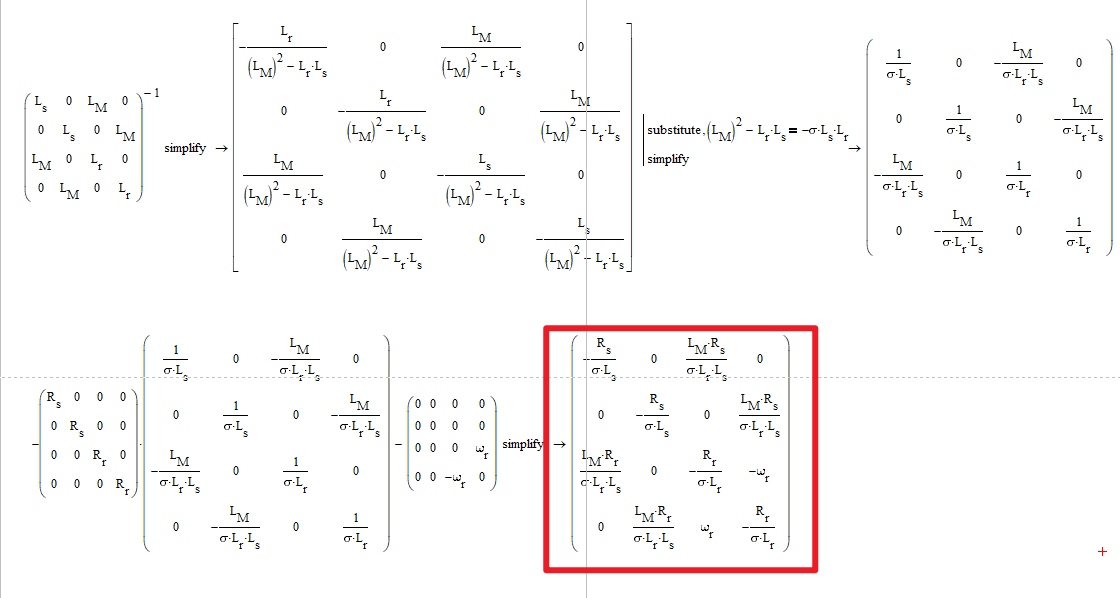
最终,用于仿真的模型为:
{ d d t [ ψ s α ψ s β ψ r α ψ r β ] = [ − R s σ L s 0 L M R s σ L r L s 0 0 − R s σ L s 0 L M R s σ L r L s L M R r σ L r L s 0 − R r σ L r − ω r 0 L M R r σ L r L s ω r − R r σ L r ] [ ψ s α ψ s β ψ r α ψ r β ] + [ u s α u s β u r α u r β ] J p d ω r d t = T e − T L \begin{cases} \frac{d}{dt} \left[\begin{matrix} \psi_{s\alpha} \\ \psi_{s\beta} \\ \psi_{r\alpha} \\ \psi_{r\beta} \end{matrix}\right]= \left[\begin{matrix} \frac{-R_{s}}{\sigma L_{s}} & 0 & \frac{L_{M}R_{s}}{\sigma L_{r}L_{s}} & 0 \\ 0 & \frac{-R_{s}}{\sigma L_{s}} & 0 & \frac{L_{M}R_{s}}{\sigma L_{r}L_{s}} \\ \frac{L_{M}R_{r}}{\sigma L_{r}L_{s}} & 0 & \frac{-R_{r}}{\sigma L_{r}} & -\omega_{r} \\ 0 & \frac{L_{M}R_{r}}{\sigma L_{r}L_{s}} & \omega_{r} & \frac{-R_{r}}{\sigma L_{r}} \\ \end{matrix}\right] \left[\begin{matrix} \psi_{s\alpha} \\ \psi_{s\beta} \\ \psi_{r\alpha} \\ \psi_{r\beta} \end{matrix}\right] +\left[\begin{matrix} u_{s\alpha} \\ u_{s\beta} \\ u_{r\alpha} \\ u_{r\beta} \end{matrix}\right] \\ \frac{J}{p}\frac{d \omega_{r}}{dt}=T_{e}-T_{L} \end{cases} ⎩ ⎨ ⎧dtd ψsαψsβψrαψrβ = σLs−Rs0σLrLsLMRr00σLs−Rs0σLrLsLMRrσLrLsLMRs0σLr−Rrωr0σLrLsLMRs−ωrσLr−Rr ψsαψsβψrαψrβ + usαusβurαurβ pJdtdωr=Te−TL
p为极对数,仿真中p=2。
电机仿真模型搭建
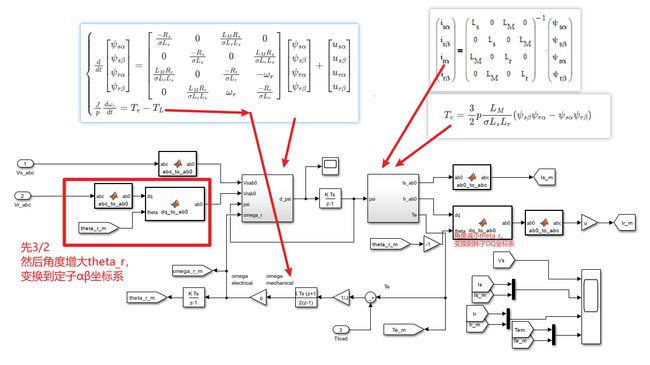
仿真中使用磁链来计算电磁转矩。
T e = 3 2 p L M σ L s L r ( ψ s β ψ r α − ψ s α ψ r β ) T_{e}=\frac{3}{2}p \frac{L_{M}}{\sigma L_{s}L_{r}}(\psi_{s \beta}\psi_{r \alpha}-\psi_{s \alpha}\psi_{r \beta}) Te=23pσLsLrLM(ψsβψrα−ψsαψrβ)
自己搭建仿真模型如下:
- 因为是定子αβ坐标系下的模型,
- 需要对输入的定子电压做Clarke变换
- 对输入的转子电压,先做Clarke变换,再做坐标系旋转。
- 对输出的定子电流,做Clarke反变换,得到定子ABC电流
- 对输出的转子电流,先做坐标系旋转,再做Clarke反变换转子abc电流
- 转子电压和Simulink模型使用相同的输入,都是,考虑了变压器的变比。
- d d t ψ \frac{d}{dt}\boldsymbol{\psi} dtdψ 4个方程的计算,然后通过积分得到4个磁链的参数
- 基于磁链值,计算电流和电磁转矩
- 电磁转矩和机械转矩做差,然后积分,得到机械转速(上面模型的第5个方程)。再积分,得到转子的机械角度和电角度。
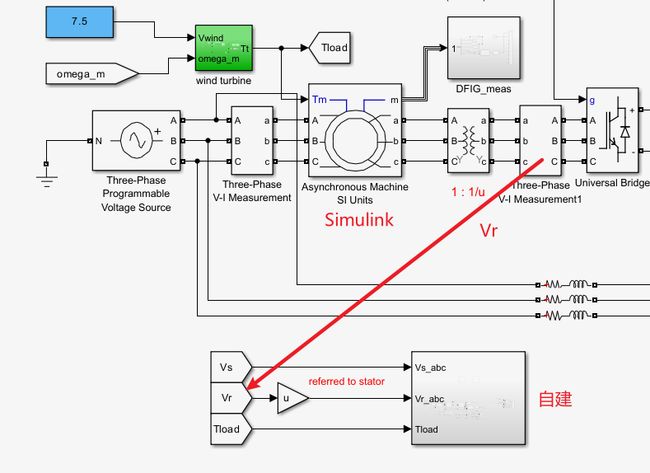
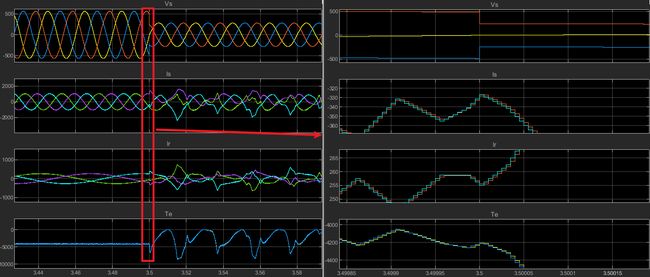
仿真对比
上方信号来自Simulink模型,下方带_m的信号来自刚才搭的模型。
自己搭的模型,输出的定子电流、转子电流、转矩,和Simulink模型基本相同。电网电压跌落期间的暂态波形也基本一致。但是放大后可以看到差异。
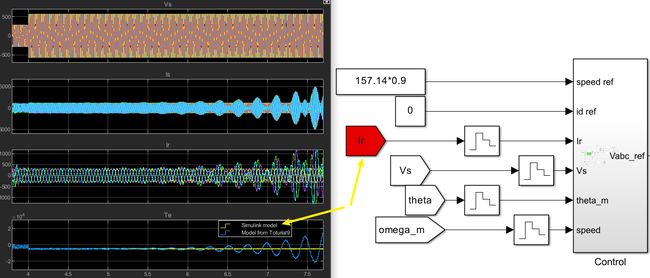
剩余问题(已解决)
- 自己搭的模型,在跑较长时间以后(10s左右),输出会发散,波形就和Simulink的模型不一致了,(不知道教程里面的模型是不是也这样,感觉可能是我模型里面一些模块的设置问题)
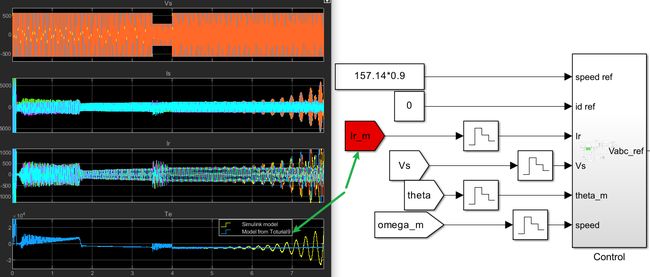
- 更新:发现是因为,仿真中自建的模型相当于开环运行,控制系统使用的转子电流来自simulink的模型,然后变换器的输出同时加在两个模型上。所以自建模型在长时间开环运行后就容易发散。如果用两套控制系统分别控制两个模型,那么都可以长时间运行。
转子电流来自simulink的模型ir,自建模型发散。
转子电流来自教程9的模型ir_m:simulink的模型发散。
初始化代码
clear
% DFIG parameters -> Rotor parameters referred to the stator side
f = 50; % Stator frequency (Hz)
Ps = 2e6; % Rated stator power (W)
n = 1500; % Rated rotational speed (rev/min)
Vs = 690; % Rated stator voltage (V)
Is = 1760; % Rated stator current (A)
Tem = 12732; % Rated torque (N.m)
p=2; % Pole pair
u = 1/3; % Stator/rotor turns ratio
Vr = 2070; % Rated rotor voltage (non-reached) (V)
smax = 1/3; % Maximum slip
Vr_stator = (Vr*smax) *u; % Rated rotor voltage referred to stator (V)
Rs = 2.6e-3; % Stator resistance(ohm)
Lsi = 0.087e-3; % Leakage inductance (stator & rotor) (H)
Lm = 2.5e-3; % Magnetizing inductance (H)
Rr = 2.9e-3; % Rotor resistance referred to stator (ohm)
Ls = Lm + Lsi; % Stator inductance (H)
Lr = Lm + Lsi; % Rotor inductance (H)
% Vbus = Vr_stator*sqrt(2); % DC de bus voltge referred to stator (V)
Vbus = 1150; % as in tutorial 4
sigma = 1-Lm^2/(Ls*Lr);
Fs = Vs*sqrt(2/3)/(2*pi*f); % Stator Flux (aprox.) (Wb)
J = 127; % Inertia, originally 127, reduced by 2 to make the response faster
D = 10e-3; %damping = 0. originally D = 1e-3;
fsw = 4e3;
Ts = 1/fsw/50;
kT = -1.5*p*(Lm/Ls)*Fs; % kT, coef of output of the speed controller
tau_i = (sigma*Lr)/Rr;
tau_n = 0.05;
wni = 100*(1/tau_i);
wnn = 1/tau_n;
kp_id = (2*wni*sigma*Lr)-Rr;
kp_iq = kp_id;
ki_id = (wni^2)*Lr*sigma;
ki_iq = ki_id;
kp_n = (2*wnn*J)/p; %kp_n = (2*wnn*J)/p;
ki_n = (wnn^2)*J/p; %ki_n = (wnn^2)*J/p;
% Three blade wind turbine mode
N = 100; % Gearbox ratio
Radio= 42; % blade radius
ro= 1.225; % Air density
% Cp and Ct curves
beta=0; % Pitch angle
ind2=1;
for lambda=0.1:0.01:11.8
lambdai(ind2)= (1./((1./(lambda-0.02.*beta) + (0.003./ (beta^3+1)))));
Cp(ind2)=0.73*(151./lambdai(ind2) - 0.58*beta - 0.002.*beta^2.14-13.2).*(exp(-18.4./lambdai (ind2)));
Ct(ind2)=Cp(ind2)/lambda;
ind2=ind2+1;
end
tab_lambda=[0.1:0.01:11.8];
% Kopt for MPPT
Cp_max = 0.44;
lambda_opt = 7.2;
Kopt = ((0.5*ro*pi* (Radio^5) *Cp_max)/(lambda_opt^3));
% Power curve in fucntion of wind speed
P = 1.0e+06 *[0,0,0,0,0,0,0,0.0472,0.1097,0.1815,0.2568,0.3418, ...
0.4437,0.5642, 0.7046, 0.8667,1.0518,1.2616, 1.4976, 1.7613,2.0534,...
2.3513,2.4024,2.4024,2.4024, 2.4024,2.4024,2.4024];
V = [0.0000,0.5556,1.1111,1.6667,2.2222,2.7778,3.3333,3.8889, 4.4444,...
5.0000,5.5556,6.1111,6.6667,7.2222,7.7778,8.3333,8.8889,9.4444, ...
10.0000,10.5556,11.1111, 11.6667,12.2222,12.7778,13.3333, 13.8889,...
14.4444,15.0000];
% figure
% subplot(1,2,1)
% plot(tab_lambda, Ct, 'linewidth',1.5)
% xlabel('\lambda', 'fontsize',14)
% ylabel('Ct', 'fontsize',14)
% subplot(1,2,2)
% plot (V, P, 'linewidth', 1.5)
% grid
% xlabel('Wind speed (m/s)', 'fontsize',14)
% ylabel('Power (W)', 'fontsize',14)
% Grid side converter
Cbus = 80e-3; % DC bus capacitance
Rg = 20e-6; % Grid side filter's resisatance
Lg = 400e-6; % Grid side filter's inductance
Kpg = 1/(1.5*Vs*sqrt(2/3));
Kqg = -Kpg;
% PI regulators
tau_ig = Lg/Rg;
wnig = 60*2*pi;
kp_idg = (2*wnig*Lg)-Rg;
kp_iqg = kp_idg;
ki_idg = (wnig^2)*Lg;
ki_iqg = ki_idg;
kp_v = -1000;
ki_v = -300000; %ki_v = -300000;
Rcrowbar = 0.2; % crowbar circuit resistance
Tcrowbar = 0.1; % crowbar duration 0.1s
t_dip= 3;
t_recover = 3.5;
t_normal = 4.17;
a11 = -Rs/(sigma*Ls);
a22 = a11;
a33 = -Rr/(sigma*Lr);
a44 = a33;
a13 = Rs*Lm/(sigma*Ls*Lr);
a24 = a13;
a31 = Rr*Lm/(sigma*Ls*Lr);
a42 = a31;
A = [a11, 0, a13, 0;
0, a22, 0, a24;
a31, 0, a33, 0;
0, a42, 0, a44];
% A = [a11, 0, a13, 0;
% 0, a11, 0, a13;
% a31, 0, a33, 0;
% 0, a31, 0, a33];