第七届飞思卡尔智能车比赛的赛道边缘提取-----第一篇博客
园龄有11个月了??。这么快。。。因为参加飞思卡尔的智能车比赛,所以申请开通了这个博客,想不到这么容易就通过了。
看过这么多博客了,感觉写博客都是 在各种方面很有实力的人,包括软件,硬件。
但,永远不敢写点东西的话,就好像永远也赶不上他们,
如果说 图像处理,数据库,网页编辑,系统架构,网络工程等等,我都不OK的,但算法自认为 还OK。
废话不多说,这次比赛中,我的任务也是 负责 摄像头的处理算法,硬件接口等由一位朋友写,
在处理图像中,第一个问题就是 黑线,第七届比赛的新地图 规定在 赛道中间是没有中心黑线的,而且赛道周围都是蓝色。
我们的摄像头是CMOS的彩色摄像头,但因为参数的问题,时序,行中断以及场中断,不得不更换了摄像头,更换为0v7620,
好像是这个型号的黑白摄像头。但在采集中,第一个问题,还是时序的问题,这个问题除了 写上位机带控制程序,不断调试,
没有别的方法吧。。调试的方法,我也不太懂,不过可以留言交流。
我写的第一个问题就是 黑线的确定以及循迹。初步确定为 采集左边这条 边界线,作为 指引线。
采集的方法 主要有两种 直接二值化 存入数组,等待处理,或者 直接边缘检测法,检测跳变,检测的跳变的阈值要合适,否者蓝色背景和黑线也可能产生跳变。
没有贴代码的原因,是因为不成型,也没有移植到硬件上去。不OK。
关于 图像的矫正,多余以前的比赛选手,会做 因为摄像头的高度产生的梯形失真和 广角镜头不可避免的桶形失真的矫正。
桶形失真的矫正一定要做,尤其车子运行起来后,动态图像本身就差,角度就差,很可能拐弯就冲跑道。
矫正方法很多,不再多说。
梯形失真的矫正方法就是 可以做可以不做,第一它矫正非常影响视野。第二,如果用到斜率的话,就不要做 矫正。个人愚见。
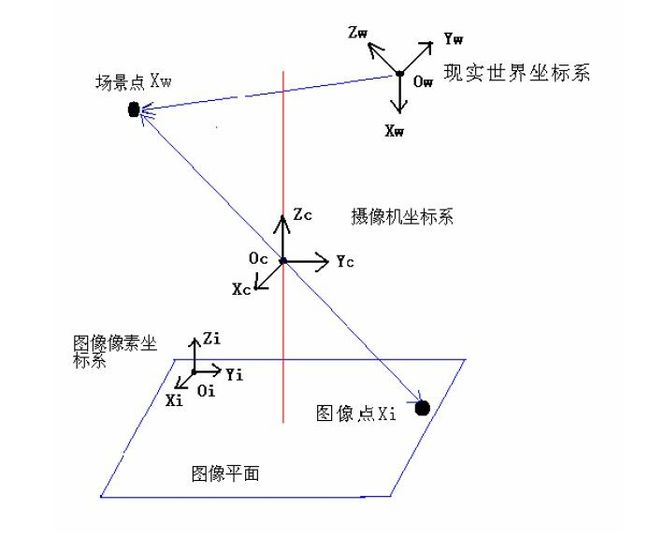
公式就不再推导,证明了。原理如下。
关于图像的提取,是智能车的除了硬件接口后的 第一步,而以后的图像处理好,打好基础。
所以处理好,比较重要吧 。
感觉这一篇是非常没有营养的博文。。但 我的激动的 心情 真的是 难以言表的。感谢看到博文的人。