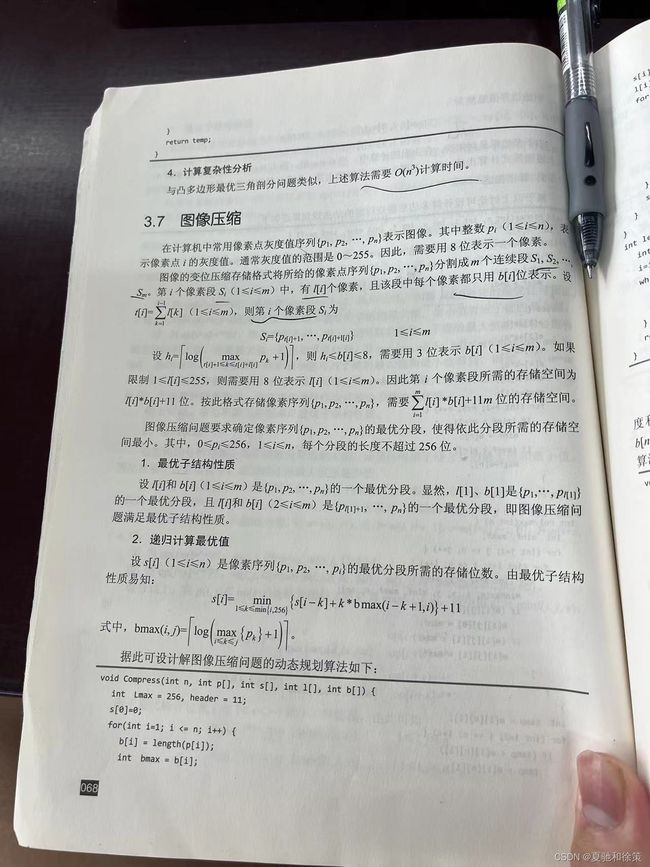
3.7 图像压缩
- 博主简介:一个爱打游戏的计算机专业学生
- 博主主页: @夏驰和徐策
- 所属专栏:算法设计与分析
1.什么是图像压缩?
在动态规划中,图像压缩是指通过减少图像数据的存储空间,以实现图像文件的压缩和存储优化。动态规划在图像压缩中可以应用于两个主要方面:无损压缩和有损压缩。
无损压缩是指通过压缩图像数据,使得压缩后的图像可以完全还原为原始图像,没有任何信息丢失。在无损压缩中,动态规划可以用于寻找图像中的冗余部分,并进行数据的编码和解码。例如,通过动态规划算法,可以找到图像中连续的相同像素值或者相似的像素值,并用更简洁的方式表示,从而减少存储空间的占用。
有损压缩是指通过压缩图像数据,虽然在还原图像时会有信息损失,但可以在人眼难以察觉的范围内,获得更高的压缩比率。在有损压缩中,动态规划可以用于确定丢弃哪些图像数据以及如何量化剩余的数据。通过动态规划算法,可以在保持图像质量的同时,最大限度地减少数据量。
动态规划在图像压缩中的应用主要集中在压缩算法的设计和图像数据的编码和解码过程。通过适当的状态定义、转移方程和最优子结构的性质,可以实现高效的图像压缩算法,并在压缩和解压缩过程中保持图像质量。
需要注意的是,动态规划在图像压缩中往往与其他技术和算法结合使用,例如离散余弦变换(DCT)和哈夫曼编码等,以实现更好的压缩效果和图像质量控制。
2.如何证明图像压缩的最优子结构性质?
在图像压缩中,我们可以利用动态规划来实现最优子结构性质。最优子结构性质是指一个问题的最优解可以由其子问题的最优解推导得出。
首先,我们定义图像压缩的问题为将原始图像的像素数据进行压缩,以减少存储空间。我们将原始图像表示为一个二维矩阵,其中每个元素表示一个像素的值。
假设我们将原始图像进行压缩后得到的压缩图像也是一个二维矩阵,其中每个元素表示一个像素的值。我们的目标是找到一种压缩方式,使得压缩图像的存储空间最小化,同时尽量保持图像质量。
现在考虑一个子问题,即将原始图像的某个子区域进行压缩。假设该子区域对应的压缩图像的存储空间最小化,并且压缩方式是最优的。我们可以通过对该子区域进行进一步的划分和压缩来得到原始图像的最优压缩方式。
具体而言,假设我们将该子区域划分为两个子区域,分别进行压缩,并得到最优的压缩方式。那么原始图像的最优压缩方式可以由这两个子区域的最优压缩方式组合而成。
这是因为最优压缩方式应该满足最小化存储空间的要求,而将子区域进行划分和压缩可以得到更小的存储空间。因此,原始图像的最优压缩方式可以通过子区域的最优压缩方式递归地获得。
通过类似的推理,我们可以将原始图像划分为多个子区域,并对每个子区域进行最优压缩,然后将它们组合起来得到原始图像的最优压缩方式。这表明图像压缩问题具有最优子结构性质。
综上所述,图像压缩问题满足最优子结构性质,因此可以利用动态规划来求解最优压缩方式。通过定义适当的状态、转移方程和边界条件,可以通过子问题的最优解推导得到原始图像的最优压缩方式。

3.如何推导出计算最优值
要推导出图像压缩的递归计算最优值,我们需要定义适当的状态和转移方程。
假设我们有一个原始图像,表示为一个二维矩阵,其中每个元素表示一个像素的值。我们将原始图像进行压缩得到压缩图像。
我们定义一个状态函数f(i, j),表示原始图像中以第i行第j列像素为右下角的子区域的最优压缩值。这里i和j的取值范围为1到n,表示原始图像的行数和列数。
我们可以通过递归计算来求解f(i, j)的最优值。假设我们已经知道了f(i', j')的最优值,其中i' <= i且j' <= j。
现在考虑如何计算f(i, j)的最优值。我们可以将原始图像分成两个部分,一个是包含第i行的部分,另一个是不包含第i行的部分。假设第i行之前的所有行已经压缩完毕,即f(i', j')已知。
情况一:如果我们选择将第i行保留在压缩图像中,那么我们可以将原始图像中第i行之前的部分视为一个子问题,求解出子问题的最优压缩值,然后加上第i行的压缩值。即f(i, j) = f(i-1, j') + compress(i, j),其中compress(i, j)表示第i行第j列像素的压缩值。
情况二:如果我们选择将第i行从压缩图像中删除,那么我们可以将原始图像中前i-1行的所有像素视为一个子问题,求解出子问题的最优压缩值。即f(i, j) = f(i-1, j)。
我们可以选择情况一和情况二中的较小值作为f(i, j)的最优值。即f(i, j) = min(f(i-1, j'), f(i-1, j) + compress(i, j))。
通过递归计算f(i, j),我们可以得到原始图像的最优压缩值,即f(n, m),其中n是原始图像的行数,m是原始图像的列数。
需要注意的是,我们还需要定义边界条件,即f(1, j)和f(i, 1)的值,表示原始图像的第一行和第一列的压缩值。
综上所述,通过定义适当的状态和转移方程,并设置边界条件,可以递归地计算出图像压缩的最优值。
4.递归计算最优值算法实现
void Traceback(int n,int& i,int s[],int l[])
{
if(n==0)
{
return;
}
Traceback(n-l[n],i,s,l);
s[i++]=n-l[n];
}
void Output(int s[],int l[],int b[],int n)
{
cout<<"The optimal value is"<我的理解:
这段代码实现了图像压缩问题的最优解的构造过程。
函数`Traceback`用于逆向追踪,根据最优解的状态数组s和长度数组l,从最后一个像素逐步向前推导,找出保留的像素的位置。参数n表示原始图像的总像素数,参数i是一个引用参数,用于记录保留像素的位置。
函数`Output`用于输出最优解的详细信息。它首先输出最优压缩值,即保留的像素数目。然后调用`Traceback`函数来构造最优解的保留像素位置数组s。接着,根据保留像素位置数组s,再次调用`Traceback`函数来构造最优解的长度数组l和比特率数组b。最后,通过循环遍历输出每个分段的长度和比特率。
总体而言,这段代码的作用是根据最优解的状态数组s、长度数组l和比特率数组b,构造出最优解的保留像素位置以及各个分段的长度和比特率。
具体的说:
```cpp
void Traceback(int n, int& i, int s[], int l[]) {
if (n == 0) {
return;
}
Traceback(n - l[n], i, s, l);
s[i++] = n - l[n];
}
```
这段代码定义了函数`Traceback`,用于逆向追踪最优解的保留像素位置。它接受参数n表示原始图像的总像素数,参数i是一个引用参数,用于记录保留像素的位置。函数使用递归的方式从最后一个像素开始向前推导,每次递归调用时,将当前像素位置减去对应长度数组l的值,并将结果存储在保留像素位置数组s中。最后返回函数的调用。
```cpp
void Output(int s[], int l[], int b[], int n) {
cout << "The optimal value is " << s[n] << endl;
int m = 0;
Traceback(n, m, s, l);
s[m] = n;
cout << "Decompose into " << m << " segments" << endl;
for (int j = 1; j <= m; j++) {
l[j] = l[s[j]];
b[j] = b[s[j]];
}
for (int j = 1; j <= m; j++) {
cout << l[j] << ' ' << b[j] << endl;
}
}
```
这段代码定义了函数`Output`,用于输出最优解的详细信息。它接受参数s、l、b和n,分别表示保留像素位置数组、长度数组、比特率数组以及原始图像的总像素数。函数首先输出最优压缩值,即保留的像素数目,通过访问保留像素位置数组s的最后一个元素s[n]得到。然后调用`Traceback`函数来构造最优解的保留像素位置数组s,其中参数m用于记录保留像素位置的索引。接着,将最后一个保留像素的位置设置为原始图像的总像素数n,并输出分段数目m。接下来,通过循环遍历保留像素位置数组s,更新长度数组l和比特率数组b的值,使其对应于最优解的分段长度和比特率。最后,再次通过循环遍历分段数目m,输出每个分段的长度l[j]和比特率b[j]。
总体而言,这段代码的作用是根据最优解的状态数组s、长度数组l和比特率数组b,构造出最优解的保留像素位置以及各个分段的长度和比特率,并将其逐行输出。
5.构造最优解
源代码:
void Traceback(int n,int& i,int s[],int l[])
{
if(n==0)
{
return;
}
Traceback(n-l[n],i,s,l);
s[i++]=n-l[n];
}
void Output(int s[],int l[],int b[],int n)
{
cout<<"The optimal value is"<我的理解:
这段代码实现了动态规划算法中的图像压缩最优解问题的解析过程。
1. 函数`Traceback`用于回溯构造最优解。参数包括图像大小`n`,一个存储最优解的数组`s`,一个存储长度信息的数组`l`,以及一个用于记录当前解析位置的变量`i`。
2. 首先,判断当前位置`n`是否为0。如果是0,表示已经回溯到图像的起始位置,函数直接返回。
3. 如果当前位置`n`不为0,通过递归调用`Traceback`函数,将`n - l[n]`作为新的位置参数传入。这样就可以回溯到上一个最优子结构的位置。
4. 在回溯过程中,将`n - l[n]`存入数组`s`的下一个位置`s[i]`,然后将`i`自增1,以记录当前解析的位置。
5. 函数`Output`用于输出最优值和解析结果。参数包括存储最优解的数组`s`,存储长度信息的数组`l`,存储其他信息的数组`b`,以及图像大小`n`。
6. 首先,输出最优值,即`s[n]`,表示最优解的长度。
7. 创建一个变量`m`并初始化为0,用于记录解析结果中的段数。
8. 调用`Traceback`函数,将图像大小`n`和变量`m`作为参数,用于回溯构造解析结果。
9. 将数组`s`的第`m`个位置`s[m]`设置为图像大小`n`,表示回溯结束后的最优解。
10. 输出解析结果的段数,即`m`的值。
11. 使用循环遍历数组`s`,对于每个位置`s[j]`,将`l[s[j]]`赋值给`l[j]`,将`b[s[j]]`赋值给`b[j]`,以获取对应段的长度和其他信息。
12. 使用循环遍历数组`l`和`b`,输出解析结果中每个段的长度和其他信息。
以上是这段代码的解释,它通过回溯最优解数组`s`,构造了图像压缩的解析结果,并输出了最优值和解析结果。
总结:
图像压缩的动态规划算法的重点、难点和易错点如下:
重点:
1. 定义状态:确定问题的状态表示,通常是通过定义子问题和状态变量来描述问题的特征和性质。
2. 状态转移方程:推导出递归的状态转移方程,描述问题的最优子结构,将大问题拆解为子问题并求解子问题的最优解。
3. 最优子结构性质:证明问题具有最优子结构性质,即问题的最优解可以由子问题的最优解推导得到。
4. 边界条件:确定递归的边界条件,即最小规模的子问题的解。
难点:
1. 定义状态:在图像压缩问题中,确定状态表示需要考虑图像的特征和压缩的目标,例如像素值、图像区域等。
2. 状态转移方程:推导出合理的状态转移方程,需要深入理解问题的特性和约束条件,可能需要进行数学推导和分析。
3. 最优子结构性质:证明问题满足最优子结构性质需要严格的数学推理和证明过程,可能涉及到数学归纳法或数学优化理论。
易错点:
1. 边界条件:确定递归的边界条件时容易出错,需要考虑问题的具体情况,确保递归能够终止。
2. 数组索引:在实现动态规划算法时,需要注意数组的索引范围和访问方式,避免越界或错误的数组访问。
3. 递归函数调用:在递归函数的调用过程中,需要传递正确的参数,确保递归的层次和参数的更新是正确的。
总结:图像压缩的动态规划算法的重点是定义合适的状态表示和推导状态转移方程,难点在于理解问题的特性和证明最优子结构性质,易错点在于确定边界条件和正确处理数组索引和递归函数调用。
