深度相机和彩色相机对齐(d2c)
一般商用的rgbd相机的sdk自带d2c的api,但是LZ还是想利用空闲时间理解下其原理。
第一步:标定彩色相机和深度相机。
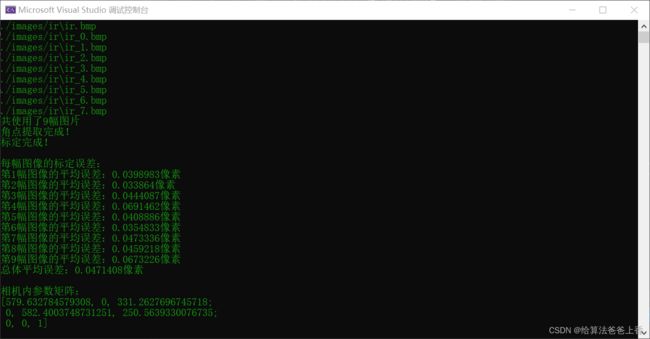
分别采集若干张彩色摄像头和红外摄像头(对于带有红外摄像头进行深度测量的深度摄像头,红外摄像头和深度摄像头其实是同一个)的标定板成像图片。LZ这里各采集了9张,如下所示:


这里除了第一组图片(color.bmp和ir.bmp)需要在同一场景下拍摄,其他的color图片和ir图片不需要一一对应,可以分开采集。注意,红外摄像头直接拍摄标定板可能成像不清楚,会存在大量噪声影响标定板角点提取。此时可以遮挡住红外发射器,并使用红外光源照射标定板(参考深度图与彩色图的配准与对齐)。
标定程序:
#include 根据自己标定板参数设置BOARD_SCALE、BOARD_HEIGHT和BOARD_WIDTH的值。标定彩色相机和红外相机的内参如下:

第二步:求解深度相机到彩色相机的变换矩阵
第一步中的程序计算出color.bmp和ir.bmp这两张图片对应的相机外参分别为:
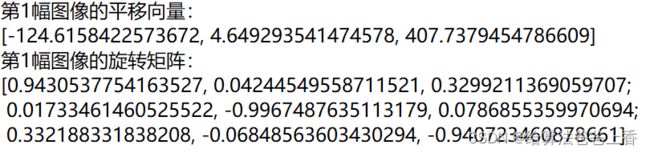

求解深度相机到彩色相机的变换矩阵的原理:(参考深度图与彩色图的配准与对齐,其实就是求解一个4*4刚性变换矩阵)
使用下面程序计算深度相机到彩色相机的变换矩阵:
#include 求解结果如下:

第三步:rgbd对齐(配准)

原理参考:RGB 图像与深度图像对齐
将第一步、第二步标定得到的彩色相机和深度相机的内参以及深度相机到彩色相机的变换矩阵填入下面程序的对应位置:
#include rgbd对齐前后点云可视化结果:


注意包装盒的右侧、水壶的把手以及右侧和地面接近部分的点云在rgbd对齐前后可以看出较大区别。
本文所有的代码和图片已更新放在下载连接:深度相机和彩色相机对齐(d2c)