西瓜书+南瓜书 第三章 线性回归笔记与理解
注:结合南瓜书及其作者的讲解视频,本人对第三章的知识点有了更深刻的理解。在此首先附上南瓜书作者的讲解视频链接:【吃瓜教程】《机器学习公式详解》(南瓜书)与西瓜书公式推导直播合集_哔哩哔哩_bilibili
一、一元线性回归
线性回归试图学得![]() ,使得
,使得![]() . 如何确定 w 和 b 呢?关键在于如何衡量 f (x) 与 y 之间的差别。均方误差是回归任务中最常用的性能度量,我们可以让均方误差最小化,即
. 如何确定 w 和 b 呢?关键在于如何衡量 f (x) 与 y 之间的差别。均方误差是回归任务中最常用的性能度量,我们可以让均方误差最小化,即
![]()
![]()
求解 w 和 b 使损失函数 ![]() 最小化的过程,称为线性回归模型的最小二乘“参数估计”。
最小化的过程,称为线性回归模型的最小二乘“参数估计”。
二、极大似然估计
下面从极大似然估计的角度推导出损失函数![]() :
:
对于线性回归来说也可以假设其为以下模型:
![]()
其中 ![]() 为随机误差,通常假设其服从正态分布
为随机误差,通常假设其服从正态分布 ![]() ,所以
,所以 ![]() 的概率密度函数为
的概率密度函数为
![]()
将 ![]() 用 y - (wx+b) 等价替换,
用 y - (wx+b) 等价替换,
![]()
用极大似然估计来估计 w 和 b 的值
![]()
最大化 ln L(w,b) 等价于最小化
![]()
也即等价于最小二乘估计。
三、求解 w 和 b
注意:最优化中的凸函数与高数中我们理解的凹函数是一致的,机器学习中的凸函数对应的就是最优化中的凸函数。
如果损失函数 ![]() 是凸函数,则我们可以通过求偏导的形式求得让
是凸函数,则我们可以通过求偏导的形式求得让 ![]() 最小的 w 和 b 值。那么如何证明
最小的 w 和 b 值。那么如何证明 ![]() 是凸函数呢?在这里放上一张南瓜书作者对于凸函数的定义的图片。
是凸函数呢?在这里放上一张南瓜书作者对于凸函数的定义的图片。
即去证明 ![]() 的Hessian矩阵是半正定的。
的Hessian矩阵是半正定的。
半正定矩阵的判定定理之一:实对称矩阵的所有顺序主子式均为非负,则该矩阵为半正定矩阵。
![]()
![]()
![]()
![]()
![]()
![]()
经推导 与 ![]() 都非负,所以
都非负,所以 ![]() 的Hessian矩阵是半正定的,即
的Hessian矩阵是半正定的,即![]() 是关于w 和 b 的凸函数。具体推导过程可见视频链接。
是关于w 和 b 的凸函数。具体推导过程可见视频链接。
分别对 w 和 b 求偏导,并令其等于0,可以得到西瓜书中的公式3.7、3.8。
![]()
![]()
四、一元线性回归矩阵向量表示
开头讲到,线性回归是求解
![]()
![]()
在实际应用中,不会按照第三节所讲的那样去求 w 和 b ,matlab 和 python 中都能很方便地进行矩阵运算,因此通常将上式改写为矩阵相乘的形式。
假设有 i 个数据,横坐标 x 和纵坐标 y 已知,要求解的拟合直线方程为:
![]()
用向量形式表示为:
, 令
![]()
![]()
为了让 ![]() 最小,已知其为凸函数,对 W 求偏导。
最小,已知其为凸函数,对 W 求偏导。
![]()
![]()
当 ![]() 为可逆矩阵时,解得:
为可逆矩阵时,解得:![]()
注意:对于实矩阵求偏导有以下公式( ![]() 表示N阶单位矩阵 ):
表示N阶单位矩阵 ):
![]()
![]()
五、 LOWESS局部加权回归
线性回归思想已经应用在了很多方法和领域里,我目前所接触到的有LOWESS(局部加权回归)、WLS最小二乘法、softmatting(软抠图)等等,下面列举一个在matlab环境下,使用LOWESS对图像直方图进行平滑的例子。
LOWESS与普通线性回归不同的地方在于,LOWESS相比普通线性回归还多了一个权重矩阵,该权重为除主对角线以外全为0的矩阵,形如:
![]()
在实验中发现,该权重能够将原本普通线性回归的直线拟合变为曲线,因为对于每个数据点,都要重新计算一个新的权重矩阵,从而每个数据点对应的 w 和 b 都不相同。
![]()
![]()
对 W 求偏导并令式子为0可得:
![]()
下面附上matlab代码:
[filename, pathname] = uigetfile('*','选择origin图片');
filepath = fullfile(pathname, filename);
origin = imread(filepath); %读取图像
[m,n,channel] = size(origin);
hist = imhist(origin); %统计直方图
k = 2;
count = (1:256)';
x = [ ones(length(hist), 1) count ]; %X向量 256 * 2
y = hist; %Y向量 256 * 1
[row,~] = size(x);
[y_out,b,w] = lowess(x,y,k); %调用函数输出
figure,plot(1:256,hist,'g',1:256,y_out,'r');
function [out,b,w] = lowess(x,y,k)
[row,~] = size(x);
out = zeros(1,row);
weights = zeros(row,row);
for i = 1:row
for j = 1:row
diff = x(i,:) - x(j,:);
weights(j,j) = exp(diff * diff'/(-2 * (k.^2))); %对每个点计算权重
end
XTwX = x' * weights * x;
if det(XTwX) == 0
disp('This matrix is singular, cannot do inverse');
end
theta = XTwX^-1 * (x' * weights * y);
b(i) = theta(1);
w(i) = theta(2);
out(i) = x(i,:) * theta;
end
end输出展示:
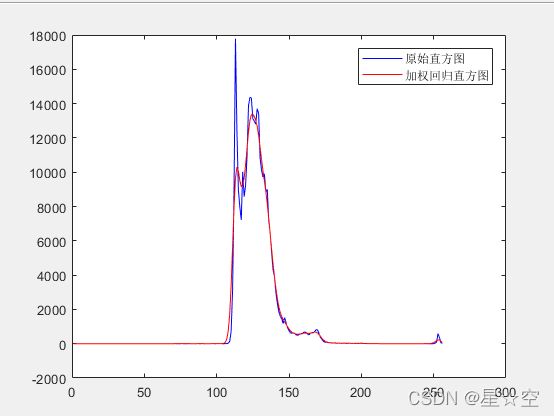
当不使用权重时,普通线性回归拟合变为直线。
六、多元线性回归
与前面一元线性回归推导过程类似,不再具体推导。
此时要拟合的曲线可能受多个因素影响。
![]()
前面提到的 X 就变为西瓜书中所示:
求解W仍然是:
![]()