【UR3系统升级到CB3.12附带URcap1.05】
【UR3系统升级到CB3.12附带URcap1.05】
- 1. 前言
-
- 1.1 Polyscope 3.12更新须知
- 1.2 更新步骤
- 2. 对 PSU 电压进行控制的步骤
-
- 2.1 启动机器人电源
- 2.2 启动机器人程序
- 2.3 查看PSU 电压
- 3. Polyscope 3.12 软件下载
-
- 3.1 CB 系列机器人
- 3.2 下载软件包URUP
- 4. CB3 软件安装的指导
-
- 4.1 连接示教器
- 4.2 更新机器人软件
- 4.3 注意事项
- 5. 总结
系统软件升级要求
| 版本 | 版本号 | 相关指导地址 | URcap |
|---|---|---|---|
| 初始版本 | 3.4 | 旧版下载中心 | 无 |
| 目标版本 | 3.12 | Polyscope 3.12指导中心 | URcap1.05 |

1. 前言
- 欢迎大家阅读2345VOR的博客【UR3系统升级到CB3.12附带URcap1.05】
- 2345VOR鹏鹏主页: 已获得CSDN《嵌入式领域优质创作者》称号,座右铭:脚踏实地,仰望星空
- 本文章属于《Ubuntu学习》和《ROS机器人学习》
Ubuntu环境搭建
【经典Ubuntu20.04版本U盘安装双系统教程】
【Windows10安装或重装ubuntu18.04双系统教程】
【Ubuntu同步系统时间】
【Ubuntu中截图工具】
【Ubuntu安装QQ】
【Ubuntu安装后基本配置】
【Ubuntu启动菜单的默认项】
【ubuntu系统中修改hosts配置】
【18.04Ubuntu中解决无法识别显示屏】
【ROS 开发神器 Visual Studio Code 的安装和设置】
【基于Ubuntu18.04+Melodic的realsense D435安装】
【Ubuntu18配置Anaconda深度学习环境】
【D435i深度相机YOLO V5结合实现目标检测】
【UR3系统升级到CB3.12附带URcap1.05】
ROS学习笔记
【1. Ubuntu18.04安装ROS Melodic】
【2. 在Github上寻找安装ROS软件包】
【3. 初学ROS,年轻人的第一个Node节点】
【4. ROS的主要通讯方式:Topic话题与Message消息】
【5. ROS机器人的运动控制】
【6. 激光雷达接入ROS】
【7. ROS 中的 IMU 惯性测量单元消息包】
目前实验室正在使用的2017年的机器人,系统版本相对较低下CB3.4,为了实现UR机器人与Ubuntu18.04 melodic通讯,参照《冰激凌啊 》教程UR机械臂学习使用的版本是 Ubuntu18.04 + ROS melodic + UR3(CB3.12),对此进行系统升级。
Polyscope 3.12 及更高版本包括重大改进,它解决了两个已识别的问题:(1) 电源输出过压和 (2) 编码器故障后的意外运动。Polyscope 3.12 在所有正在发货的 CB3 机器人中。
1.1 Polyscope 3.12更新须知
经过广泛的测试和分析,我们发现UR CB3控制器会因电源输出过高而过热。如果未检测到这种过电压情况,可能会导致火灾。此外,对意外运动的调查发现,这种运动是由于编码器故障后的运动错误造成的。上述情况不太可能发生。
- 监控PSU电压和机器人功耗。超过出厂限制后,机器人将进入故障模式(可能的错误代码C60,C61和C65),停止,并且机器人手臂和控制器的能量消耗器部分将断开电源。在这种故障模式下,消除了进一步的热量积聚。请勿从此故障重新启动机器人.
- 编码器故障后不会发生意外运动,而是机器人停止。
- 增加了URcap1.05插件
为了最大限度地降低因编码器故障而导致火灾和意外运动的风险,优傲机器人敦促所有CB3机器人客户升级到Polyscope 3.12或更高版本。
1.2 更新步骤
Polyscope 3.12 或更高版本包括监控功耗并在编码器故障时消除运动。
在将CB3机器人更新到Polyscope 3.12之前,请检查CB3控制箱主电压。电压必须低于 48.7V 才能在 3.12
更新后成功上电。如果是48.7V或更高,则可能对机器人控制器进行了未经授权的更改,从而使保修失效。
如果电压为 48.7V 或更高,请联系您的区域 UR 代表(见下文)。
以下文档链接提供了完成 Polyscope 更新的文件和过程:
1. 对 PSU 电压进行控制的步骤.
2. Polyscope 3.12 软件下载.
3. CB3 软件安装的指导.
2. 对 PSU 电压进行控制的步骤
接下来的过程不能跳过,必须严格执行,否则导致更新失败
2.1 启动机器人电源

打开机器人电源

返回初始化界面

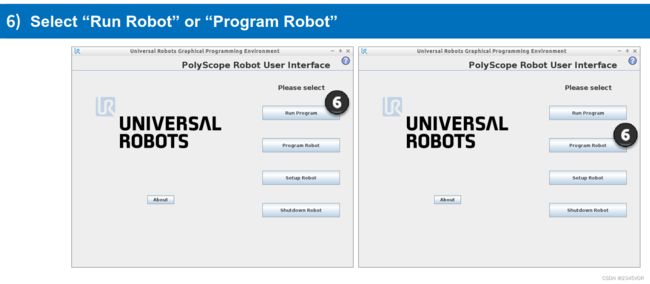
2.2 启动机器人程序
选择运行机器人或者为机器人编程
2.3 查看PSU 电压
查看当前运行日志
 电压必须低于 48.7V 才能在 3.12 更新后成功上电。如果是48.7V或更高,则可能对机器人控制器进行了未经授权的更改,从而使保修失效,建议联系相关供应商返厂维修。
电压必须低于 48.7V 才能在 3.12 更新后成功上电。如果是48.7V或更高,则可能对机器人控制器进行了未经授权的更改,从而使保修失效,建议联系相关供应商返厂维修。
3. Polyscope 3.12 软件下载
Polyscope版本需要一点点的升级,例如3.4>3.5>3.6>3.7>3.8>3.9>3.10>3.12
3.1 CB 系列机器人
对于CB系列机器人,在所有情况下仍需要逐步完成更新。第一步是检查您的 PolyScope 版本,然后从那里升级到下一个可用版本,直到您转到最新的 Polyscope 软件版本。
始终建议将机器人软件保持在最新版本。
注意:不支持降级软件。在较新的机器人上安装旧的 URUP 文件或映像文件可能会导致启动失败、另一个意外错误或机器人程序更改。
3.2 下载软件包URUP
官网地址:老软件下载中心
请注意CB3对应版本,依次下载8个更新文件
 下载后如下
下载后如下

然后用U盘复制中,不要套用其他文件夹下,否则识别失败
4. CB3 软件安装的指导
下载软件更新。更新时,必须按步骤进行,即从3.4>3.5>3.6>3.7>3.8>3.9>3.10>3.12。
在 UR3 机器人上更新软件时,固件将 自动 更新。 更换 UR3 机器人关节后,将自动 更新固件。
4.1 连接示教器
将其保存在 USB 存储器的根文件夹中。
将 U 盘插入示教器右侧的 USB 连接器。
4.2 更新机器人软件
转到 PolyScope 的主屏幕。
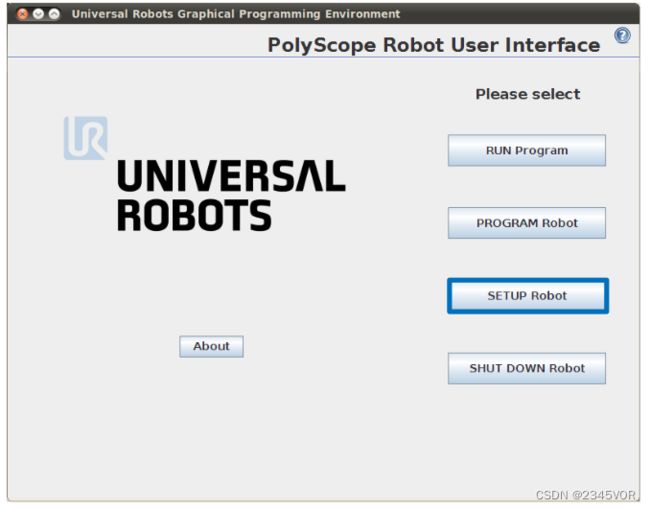 按下 SETUP Robot (设置机器人)。
按下 SETUP Robot (设置机器人)。
在左侧菜单中,选择 Update Robot (更新机器人)。

按下 Search (搜索) 按钮,在 U 盘上搜索软件更新文件。
选择所需3.5版本的软件更新,然后点按“ 更新 ”(Update)。
按下 YES(是)更新软件。
等待更新完成,成功更新后,控制器将自动重启。
移除 U 盘,并初始化机器人。
然后依次叠加升级3.6>3.7>3.8>3.9>3.10>3.12
4.3 注意事项
- 更新过程中出现故障,重新启动ok
- 大约更新到3.10系统会变慢,请少安毋躁,耐心等候就好;在3.12中会升级固件大约需要20分钟,这个过程就会安装URcap,最终效果如下:


5. 总结
首先了解CB3.12更新内容,然后知道系统软件更新需要一级一级的,最后从官网下载对应软件包,一步步更新到3.12,非常感谢你的阅读,如果有任何问题请在下面留言!!!
本文学习了【UR3系统升级到CB3.12附带URcap1.05】,我会作UR3的抓取实验,后期会分享更多有趣的操作从而实现对外部世界进行感知,充分认识这个有机与无机的环境,科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。✨✨✨