【计算机图形学】课程设计——三维美术馆漫游
计算机图形学课程设计——三维美术馆漫游
一、实验目的
- 掌握三维应用软件基本开发流程;
- 掌握基本三维建模软件Blender的基本建模方法;
- 掌握虚拟现实引擎WorldViz Vizard呈现三维场景的方法;
- 掌握三维模型呈现软件Assimp预览三维模型的方法(验证三维模型文件);
二、实验方法
2.1 钟表部分
2.1.1 设计三维钟表表盘、表针的主要步骤 & 截图
本钟表的设计主要包含:表盘、时针、分针、秒针。
第一步,设计表盘。内盘的颜色为白色,外盘的颜色为黑色,刻度位置以正方体或圆柱体显示,其中0点、3点、6点、9点时刻为圆柱体,其他时刻为长方体,表盘中心连接表针处以圆柱体显示。同时,表盘中所有正方体或圆柱体均为黑色。圆柱体直接放置在内盘刻度表圆的边界位置,正方体则需要先放置在刻度表圆的边界位置,然后进行一定角度的旋转,以朝向表盘中心。
内盘和外盘的参数数据如下表所示:
| 表盘对象 |
X scale |
Y scale |
Z scale |
X Location/m |
Y Location/m |
Z Location/m |
| 内盘 |
2.6 |
2.6 |
0.1 |
0 |
0 |
0.1 |
| 外盘 |
3 |
3 |
0.2 |
0 |
0 |
-0.1 |
第二步,设计时针。时针的颜色为黑色,长度最短。时针端点处相对于钟表的圆心在钟表盘面上有一定偏移。
第三步,设计分针。分针的颜色为黑色,长度最长。分针端点处相对于钟表的圆心在钟表盘面上有一定偏移。
第四步,设计秒针。秒针的颜色为红色,长度其次,且宽度为分针的一半。秒针端点处相对于钟表的圆心在钟表盘面上有一定偏移。
时针、分针、秒针的参数数据如下表所示:
| 表针对象 |
X Location/m |
Y Location/m |
Z Location/m |
X scale |
Y scale |
Z scale |
| 时针 |
0.3 |
0 |
0.25 |
0.6 |
0.08 |
0.03 |
| 分针 |
0.6 |
0 |
0.3 |
0.8 |
0.06 |
0.03 |
| 秒针 |
0.8 |
0 |
0.35 |
1 |
0.03 |
0.03 |
最终设计效果图如下图所示:
表盘:

时针:
分针:
秒针:
2.1.2 钟表刻度放置位置及角度的计算公式
在本实验中,我们将刻度表圆的半径设置为2.5m。为了计算各时刻点的放置位置,我们以0点至6点的时刻点连线为二维平面的x坐标,以3点至9点的时刻点连线为二维平面的y坐标,表盘二维平面所设置的坐标系如下图所示(与文档水平方向平行的轴为x轴,与文档竖直方向平行的轴为y轴,与图片右上角的投影坐标一致):
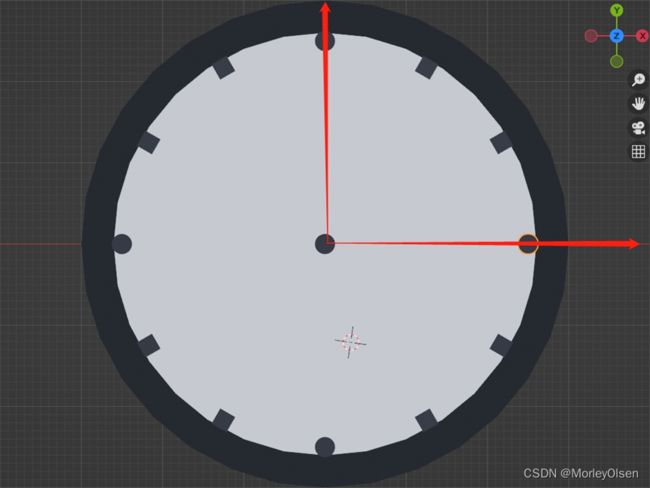
为了方便阐述确定刻度点坐标的方法,此处我们以1点的坐标为例。已知1点刻度点位于x轴顺时针旋转30°的方向上,因此其x坐标为r * cos(-30°)≈ 2.17,y坐标为r * sin(-30°) = -1.25。
因此,放置刻度点的坐标计算公式如下所示(其中θ为刻度点与x轴正向的夹角,γ为正方体自身的Z旋转角):
| 计算对象 |
坐标的计算公式 |
| X坐标 |
x = r * cosθ |
| Y坐标 |
y = r * sinθ |
| 正方体自身的Z旋转角 |
γ = θ mod 90° |
根据上述公式所求得的刻度标识物体的参数数据如下表所示(由于高度位于表盘表面且始终不变,因此Z Location恒为0.3m):
| 对象 |
X Location/m |
Y Location/m |
Z Location/m |
X旋转角/° |
Y旋转角/° |
Z旋转角/° |
| 0点 |
2.5 |
0 |
0.3 |
0 |
0 |
0 |
| 1点 |
2.17 |
-1.25 |
0.3 |
0 |
0 |
60 |
| 2点 |
1.25 |
-2.17 |
0.3 |
0 |
0 |
30 |
| 3点 |
0 |
-2.5 |
0.3 |
0 |
0 |
0 |
| 4点 |
-1.25 |
-2.17 |
0.3 |
0 |
0 |
60 |
| 5点 |
-2.17 |
-1.25 |
0.3 |
0 |
0 |
30 |
| 6点 |
-2.5 |
0 |
0.3 |
0 |
0 |
0 |
| 7点 |
-2.17 |
1.25 |
0.3 |
0 |
0 |
60 |
| 8点 |
-1.25 |
2.17 |
0.3 |
0 |
0 |
30 |
| 9点 |
0 |
2.5 |
0.3 |
0 |
0 |
0 |
| 10点 |
1.25 |
2.17 |
0.3 |
0 |
0 |
60 |
| 11点 |
2.17 |
1.25 |
0.3 |
0 |
0 |
30 |
| 中心 |
0 |
0 |
0.3 |
0 |
0 |
0 |
2.1.3 程序执行流程 & 钟表仿真截图
在本实验中,我们首先通过localtime变量获取当前时刻的系统时间,然后通过setEuler函数分别修改时针、分针、秒针的角度,最后通过回调函数和定时器对时间进行刷新并控制钟表内时针、分针、秒针的角度显示。综上所述,程序执行流程如下图所示:

对应的程序代码如下所示:
| # 时钟三维导入 # 表盘——plate、时针——hour、分针——minute、秒针——second # 设置初始的俯仰角为-90,blender模型为平放 plate = viz.add('biaopan.obj', pos=(0, 4.5, 9.9), euler=(0, -90, 0), scale=(0.3, 0.3, 0.3)) hour = viz.add('shizhen.obj', pos=(0, 4.5, 9.76), euler=(0, -90, 0), scale=(0.3, 0.3, 0.2)) minute = viz.add('fenzhen.obj', pos=(0, 4.5, 9.73), euler=(0, -90, 0), scale=(0.3, 0.3, 0.2)) second = viz.add('miaozhen.obj', pos=(0, 4.5, 9.7), euler=(0, -90, 0), scale=(0.3, 0.3, 0.2)) # 时钟控制 def clock(): # 获取当前系统时间 localtime = time.localtime() # 时针角度设置 hour.setEuler(90, localtime.tm_hour * 30 + localtime.tm_min * 0.5 + localtime.tm_sec * 360 / 43200, 90) # 分针角度设置 minute.setEuler(90, localtime.tm_min * 6 + localtime.tm_sec * 0.1, 90) # 秒针角度设置 second.setEuler(90, localtime.tm_sec * 6, 90) # 时钟定时器 vizact.ontimer(0.5, clock) # 定时器回调函数 viz.callback(viz.MOUSE_MOVE_EVENT, onMouseMove) |
在本实验中,我们通过viz.add()函数赋予plate、hour、minute、second四个变量所对应的obj文件的位置、欧拉角和规模。通过多次调试之后,我们发现钟表模型在以下数据下,可以展现出良好的姿态。
| 物体 |
位置坐标pos |
欧拉角euler |
模型规模scale |
| 表盘plate |
(0, 4.5, 9.9) |
(0, -90, 0) |
(0.3, 0.3, 0.3) |
| 时针hour |
(0, 4.5, 9.76) |
(0, -90, 0) |
(0.3, 0.3, 0.2) |
| 分针minute |
(0, 4.5, 9.73) |
(0, -90, 0) |
(0.3, 0.3, 0.2) |
| 秒针second |
(0, 4.5, 9.7) |
(0, -90, 0) |
(0.3, 0.3, 0.2) |
其中,位置坐标是以(x,z,y)为标准进行设置。同时,由于在blender环境中,钟表的z坐标是朝上设置的,所以我们在虚拟引擎中需要将钟表的朝向进行修改,最终使得其在(0, -90, 0)的欧拉角下垂直悬挂在墙壁上。即,钟表放置的欧拉角公式为:
| X角度 |
Y角度 |
Z角度 |
| 0° |
0° |
-90° |
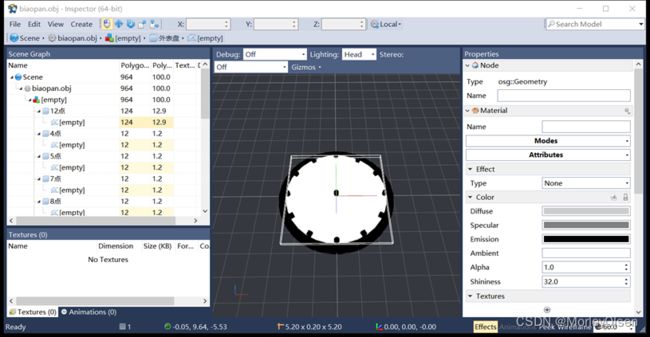
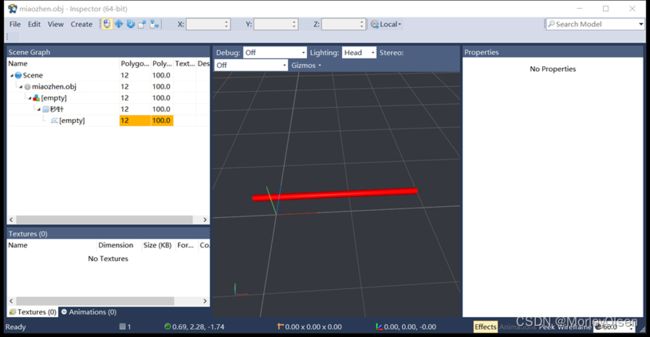
通过进入Inspector中,我们可以获得钟表各组成部件的仿真截图。最终结果如下图所示:
表盘:
秒针:
分针:

时针:

2.1.4 表针旋转角度的计算公式
根据实际钟表情况可知,秒针经过60秒旋转一周,分针经过60分钟(3600秒)旋转一周,时针经过12小时(43200秒)旋转一周。
秒针在一秒钟内更新360°/60 = 6°。
分针在一分钟内更新360°/60 = 6°,在一秒钟内更新360°/3600 = 0.1°。
时针在一小时内更新360°/12 = 30°,在一分钟内更新360°/720 = 0.5°,在一秒钟内更新360°/43200 ≈ 0.00833°。
因此,我们可以得到秒针、分针、时针的角度更新公式为:
| 计算对象 |
角度计算公式 |
| 秒针 |
θ= second * 6° |
| 分针 |
θ= minute * 6° + second * 0.1° |
| 时针 |
θ= hour * 30° + minute * 0.5° + second * 360°/43200 |
对应的程序代码如下所示:
| # 时钟控制 def clock(): # 获取当前系统时间 localtime = time.localtime() # 时针角度设置 hour.setEuler(90, localtime.tm_hour * 30 + localtime.tm_min * 0.5 + localtime.tm_sec * 360 / 43200, 90) # 分针角度设置 minute.setEuler(90, localtime.tm_min * 6 + localtime.tm_sec * 0.1, 90) # 秒针角度设置 second.setEuler(90, localtime.tm_sec * 6, 90) |
2.1.5 表针相对于钟表圆心偏移的计算公式
由于钟表的表针需要穿过圆心,因此可以人为设置超出圆心的距离。在本实验中,我们采取了以下数据进行表针的偏移:
| 计算对象 |
圆心偏移距离/m |
| 秒针 |
1.0 - 0.8 = 0.2 |
| 分针 |
0.8 – 0.6 = 0.2 |
| 时针 |
0.6 – 0.3 = 0.3 |
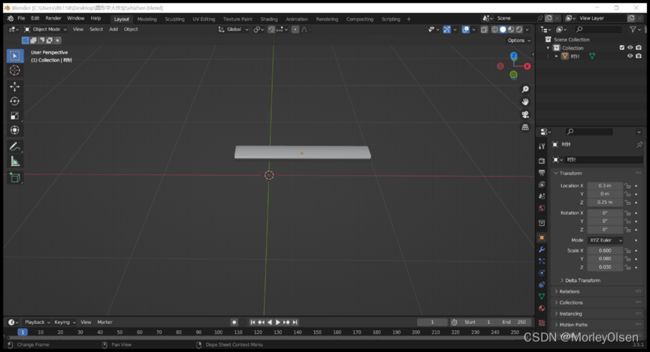
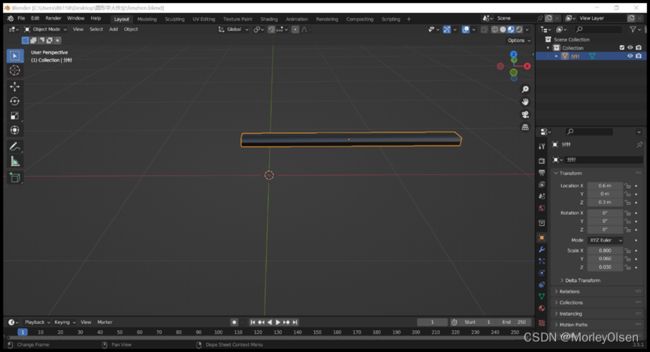
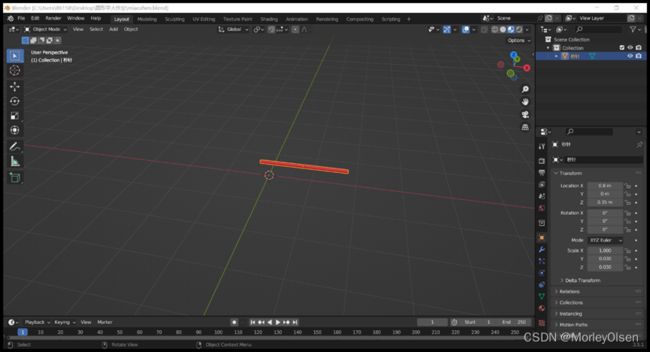
在blender中,我们也可以查看到相关数据,其中location表示物体的中心位置,scale表示单侧的长度规模大小。查看结果如下图所示:
秒针:

分针:

时针:

2.2 人物部分
2.2.1 第三人称摄像机计算公式
人物与跟随相机之间的俯视位置关机如下图所示:

由上图可知,当人物自身进行逆时针旋转的时候,虚拟摄像机同样以人物为旋转参考点进行逆时针旋转。此时,鼠标的移动方向为视图左侧,而虚拟摄像机的移动方向为视图右侧,即二者的移动方向相反。在本实验中,我们将角度变化视为一个微小变量,近似将其等同为x方向上的位移长度。因此,第三人称摄像机各坐标参数的计算公式如下表所示:
| 计算对象 |
计算公式 |
| θ |
θ = dx / 10 |
| X’ |
X’ = X – speed * sinθ |
| Y’ |
Y’ = Y |
| Z’ |
Z’ = Z – speed * cosθ |
其中,θ为鼠标移动造成的旋转角,X、Y、Z为旋转前虚拟摄像机的三维坐标,X’、Y’、Z’为旋转后虚拟摄像机的三维坐标。
同时,为了限制Z坐标的变化使得视图与正常人体的视觉范围相同,我们将其约束在(-90°,90°)的范围。如果鼠标对应的旋转角超出该范围,则Z坐标不再改变。
因为人物在向前移动的时候,参考坐标系也在向前移动,因此摄像机的X坐标和Z坐标应该根据人物的speed适当减少。具体计算公式如下表所示:
| 计算对象 |
计算公式 |
| X坐标减少量 |
speed * math.sin(math.pi * (e[0] / 180)) |
| Z坐标减少量 |
speed * math.cos(math.pi * (e[0] / 180)) |
对应的程序代码如下所示:
| # 摄像机 p = avatar.getPosition() e = avatar.getEuler() # 适当上移摄像机 p[1] = 2 p[2] -= R * math.cos(math.pi * (e[0] / 180)) p[0] -= R * math.sin(math.pi * (e[0] / 180)) e[1] += 10 # 初始状态适当俯视人物 view.setEuler(e) view.setPosition(p) # 视窗移动 def onMouseMove(m): p = avatar.getPosition() e = avatar.getEuler() # 俯仰角 v = view.getEuler()[1] - m.dy / (speed * 10) e[0] += m.dx / (speed * 5) p[1] = 2 p[2] -= speed * math.cos(math.pi * (e[0] / 180)) p[0] -= speed * math.sin(math.pi * (e[0] / 180)) avatar.setEuler(e) # 上下朝向的角度 if v > -90 and v < 90: view.setEuler(e[0], v, e[2]) else: view.setEuler(e) view.setPosition(p) |
2.2.2 利用键盘及鼠标实现前进、后退、左右跨步、左右旋转的原理
在单位时间内,人物的移动距离与其移动速度的大小相等。将移动距离依据当前位置的旋转角度投影到坐标轴,即可得到X坐标、Y坐标、Z坐标在相应操作下的更新公式。
因此,X坐标、Y坐标、Z坐标在相应操作下的更新公式如下所示:
| 操作 |
X坐标更新公式 |
Y坐标更新公式 |
Z坐标更新公式 |
| 向前走 |
X’= X + speed * sinθ |
Y’= Y |
Z’= Z + speed * cosθ |
| 向后走 |
X’= X - speed * sinθ |
Y’= Y |
Z’= Z - speed * cosθ |
| 向左走 |
X’= X - speed * sin(θ+90°) |
Y’= Y |
Z’= Z - speed * cos(θ+90°) |
| 向右走 |
X’= X - speed * sin(θ-90°) |
Y’= Y |
Z’= Z - speed * cos(θ-90°) |
对应的程序代码如下所示:
| # 人物移动 def UpdatePerson(): # 获取位置 p = avatar.getPosition() # 获取角度 Euler = avatar.getEuler() # 用户无操作,站立 if not (viz.key.isDown('w') or viz.key.isDown('a') or viz.key.isDown('d') or viz.key.isDown('s') or viz.key.isDown('r') or viz.key.isDown('e')): avatar.state(1) # w——前进 elif viz.key.isDown('w'): p[2] += mvspeed * math.cos(math.pi * (Euler[0] / 180)) p[0] += mvspeed * math.sin(math.pi * (Euler[0] / 180)) avatar.setPosition(p) avatar.state(2) # s——后退 elif viz.key.isDown('s'): p[2] -= mvspeed * math.cos(math.pi * (Euler[0] / 180)) p[0] -= mvspeed * math.sin(math.pi * (Euler[0] / 180)) avatar.setPosition(p) avatar.state(2) # a——左走 elif viz.key.isDown('a'): p[2] -= mvspeed * math.cos(math.pi * (Euler[0] / 180) + 90) p[0] -= mvspeed * math.sin(math.pi * (Euler[0] / 180) + 90) avatar.setPosition(p) avatar.state(12) # d——右走 elif viz.key.isDown('d'): p[2] -= mvspeed * math.cos(math.pi * (Euler[0] / 180) - 90) p[0] -= mvspeed * math.sin(math.pi * (Euler[0] / 180) - 90) avatar.setPosition(p) avatar.state(13) # t——向前跑 elif viz.key.isDown('r'): p[2] += mvspeed * math.cos(math.pi * (Euler[0] / 180)) * 2 p[0] += mvspeed * math.sin(math.pi * (Euler[0] / 180)) * 2 avatar.setPosition(p) avatar.state(11) # e——蹲下 elif viz.key.isDown('e'): avatar.state(10) # 更新摄像机位置 p[1] = 2 p[0] -= R * math.sin(math.pi * (Euler[0] / 180)) p[2] -= R * math.cos(math.pi * (Euler[0] / 180)) view.setPosition(p) |
2.2.3 人物行走过程中实现行走动画的程序逻辑
人物在行走过程中的位置更新,与摄像机位置的更新类似。因此,我们只需要将摄像机位置的更新同步给人物,同时调用相关state为漫游动画,即可完成人物的行走模拟。其程序逻辑如下图所示:

三、实验结果
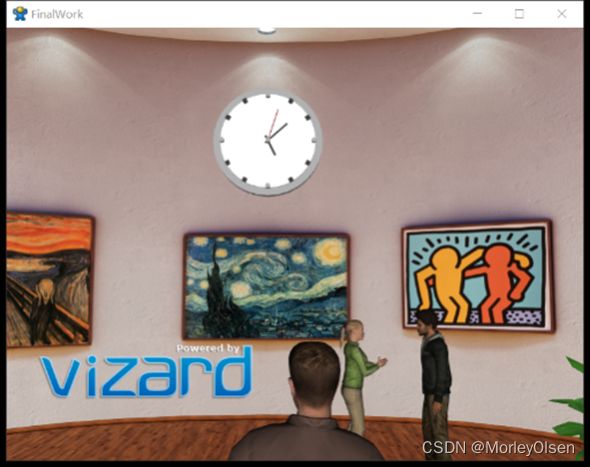
3.1 时钟实时显示当前系统时间
本功能的最终实现结果如下图所示:
3.2 两个带动画的谈话小人
在本实验中,我们设置两个对象(male和female),通过viz.addAvatar()函数加载vcc_male2.cfg和vcc_female.cfg人物模型源文件,并设置pos和euler来控制男人和女人的欧拉角。其中,男人的欧拉角为(-90, 0, 0),女人的欧拉角为(90, 0, 0)。因此,男人初始时面朝主角左侧,女人初始时面朝主角右侧。由于需要将男人和女人设置为谈话状态,因此需要将male.state和female.state进行相应赋值,此处我们将二者均赋值为4。
本功能的最终实现结果如下图所示:

对应的程序代码如下所示:
| # 聊天的男人和女人 male = viz.addAvatar('vcc_male2.cfg', pos=(2, 0, 7), euler=(-90, 0, 0)) female = viz.addAvatar('vcc_female.cfg', pos=(1, 0, 7), euler=(90, 0, 0)) # 设置聊天动作 male.state(4) female.state(4) |
3.3 带动画的第三人称漫游
在本实验中,用户可以操作键盘和鼠标控制人物的移动和行为,具体漫游动画对应关系如下表所示:
| 用户操作 |
漫游动画 |
| W |
向前走 |
| S |
向后走 |
| A |
向左走 |
| D |
向右走 |
| R |
向前跑 |
| E |
蹲下观察 |
由于截图无法完整展示动态过程,因此我们录制了一段带动画的第三人称漫游视频,完整地展示了上述操作和动画。详情请见video.mkv文件。
3.4 其他三维物体
在本实验中,我们在原有场景下新增了两只鸽子、四个盆栽、一个天空盒。其中,一只鸽子位于谈话男生和谈话女生附近,执行漫步动作;另外一只鸽子位于初始化场景左侧的椅子附近,执行啄食动作;四个盆栽位于两个椅子的短边两侧附近;天空盒位于室内场景的天花板处。
3.4.1 鸽子
①漫步鸽子
本功能的最终实现结果如下图所示:

对应的程序代码如下所示:
| # 鸽子1 bp = (0, 0, 6) bird = viz.addAvatar('pigeon.cfg', pos=bp, euler=(0, 0, 0), scale=(2, 2, 2)) # 设置移动函数 def birdMove(): p = list(bp) p[0] += random.randint(-1, 1) p[2] += random.randint(-1, 1) bird.addAction(vizact.walkTo(p)) # 鸟定时器 vizact.ontimer(1, birdMove) # 定时器回调函数 viz.callback(viz.MOUSE_MOVE_EVENT, onMouseMove) |
②啄食鸽子
本功能的最终实现结果如下图所示:

对应的程序代码如下所示:
| # 鸽子2 bp2 = (-3, 0, 6) bird2 = viz.addAvatar('pigeon.cfg', pos=bp2, euler=(0, 0, 0), scale=(2, 2, 2)) # 设置动作 bird2.state(3) |
3.4.2 盆栽
①初始化场景左侧的椅子处的盆栽
本功能的最终实现结果如下图所示:

②初始化场景右侧的椅子处的盆栽
本功能的最终实现结果如下图所示:

对应的程序代码如下所示:
| # 盆栽 plant1 = viz.addChild('plant.osgb', pos=(3, 0, 5)) plant2 = viz.addChild('plant.osgb', pos=(-3, 0, 5)) plant3 = viz.addChild('plant.osgb', pos=(-3, 0, 2)) plant4 = viz.addChild('plant.osgb', pos=(3, 0, 2)) |
3.4.3 天空盒
本功能的最终实现结果如下图所示:

对应的程序代码如下所示:
| # 天空盒 sky = viz.addChild('sky_day.osgb') |
python完整代码:
walk-skeleton源代码:
import sys
import viz
import vizact
import vizinfo
import vizshape
import vizact
import math
speed = 2.0
view = viz.MainView
viz.setMultiSample(8)
viz.go()
viz.mouse.setVisible(viz.OFF)
avatar = viz.addAvatar('vcc_male.cfg', pos=(0,0,0), euler=(0,0,0))
gallery = viz.add('gallery.osgb')
def UpdateView():
m = viz.Matrix.euler(0,0,0)
dm = viz.getFrameElapsed() * speed
if viz.key.isDown('w'):
m.preTrans([0,0,dm])
if viz.key.isDown('s'):
m.preTrans([0,0,-dm])
if viz.key.isDown('a'):
m.preTrans([-dm*0.3,0,0])
if viz.key.isDown('d'):
m.preTrans([dm*0.3,0,0])
view.setEuler(m.getEuler())
view.setPosition(m.getPosition(), viz.REL_PARENT)
vizact.ontimer(0,UpdateView)修改后的漫游代码:
# 函数库使用
import sys
import viz
import vizact
import vizinfo
import vizshape
import vizact
import math
import random
import time
# 鼠标移动速度
speed = 2.0
# 人物移动速度
mvspeed = 0.03
# 相机和人物的相对位置
R = 2
# 主视角
view = viz.MainView
# 自动物品数目
viz.setMultiSample(8)
# 运行
viz.go()
# 隐藏鼠标光标
viz.mouse.setVisible(viz.OFF)
# 主角
avatar = viz.addAvatar('vcc_male.cfg', pos=(0, 0, 0), euler=(0, 0, 0))
# 美术馆
gallery = viz.add('gallery.osgb')
# 天空盒
sky = viz.addChild('sky_day.osgb')
# 聊天的男人和女人
male = viz.addAvatar('vcc_male2.cfg', pos=(2, 0, 7), euler=(-90, 0, 0))
female = viz.addAvatar('vcc_female.cfg', pos=(1, 0, 7), euler=(90, 0, 0))
# 设置聊天动作
male.state(4)
female.state(4)
# 鸽子1
bp = (0, 0, 6)
bird = viz.addAvatar('pigeon.cfg', pos=bp, euler=(0, 0, 0), scale=(2, 2, 2))
# 设置移动函数
def birdMove():
p = list(bp)
p[0] += random.randint(-1, 1)
p[2] += random.randint(-1, 1)
bird.addAction(vizact.walkTo(p))
# 鸽子2
bp2 = (-3, 0, 6)
bird2 = viz.addAvatar('pigeon.cfg', pos=bp2, euler=(0, 0, 0), scale=(2, 2, 2))
# 设置动作
bird2.state(3)
# 盆栽
plant1 = viz.addChild('plant.osgb', pos=(3, 0, 5))
plant2 = viz.addChild('plant.osgb', pos=(-3, 0, 5))
plant3 = viz.addChild('plant.osgb', pos=(-3, 0, 2))
plant4 = viz.addChild('plant.osgb', pos=(3, 0, 2))
# 摄像机
p = avatar.getPosition()
e = avatar.getEuler()
# 适当上移摄像机
p[1] = 2
p[2] -= R * math.cos(math.pi * (e[0] / 180))
p[0] -= R * math.sin(math.pi * (e[0] / 180))
e[1] += 10 # 初始状态适当俯视人物
view.setEuler(e)
view.setPosition(p)
# 视窗移动
def onMouseMove(m):
p = avatar.getPosition()
e = avatar.getEuler()
# 俯仰角
v = view.getEuler()[1] - m.dy / (speed * 10)
e[0] += m.dx / (speed * 5)
p[1] = 2
p[2] -= speed * math.cos(math.pi * (e[0] / 180))
p[0] -= speed * math.sin(math.pi * (e[0] / 180))
avatar.setEuler(e)
# 上下朝向的角度
if v > -90 and v < 90:
view.setEuler(e[0], v, e[2])
else:
view.setEuler(e)
view.setPosition(p)
# 人物移动
def UpdatePerson():
# 获取位置
p = avatar.getPosition()
# 获取角度
Euler = avatar.getEuler()
# 用户无操作,站立
if not (viz.key.isDown('w') or viz.key.isDown('a') or viz.key.isDown('d') or viz.key.isDown('s') or viz.key.isDown('r') or viz.key.isDown('e')):
avatar.state(1)
# w——前进
elif viz.key.isDown('w'):
p[2] += mvspeed * math.cos(math.pi * (Euler[0] / 180))
p[0] += mvspeed * math.sin(math.pi * (Euler[0] / 180))
avatar.setPosition(p)
avatar.state(2)
# s——后退
elif viz.key.isDown('s'):
p[2] -= mvspeed * math.cos(math.pi * (Euler[0] / 180))
p[0] -= mvspeed * math.sin(math.pi * (Euler[0] / 180))
avatar.setPosition(p)
avatar.state(2)
# a——左走
elif viz.key.isDown('a'):
p[2] -= mvspeed * math.cos(math.pi * (Euler[0] / 180) + 90)
p[0] -= mvspeed * math.sin(math.pi * (Euler[0] / 180) + 90)
avatar.setPosition(p)
avatar.state(12)
# d——右走
elif viz.key.isDown('d'):
p[2] -= mvspeed * math.cos(math.pi * (Euler[0] / 180) - 90)
p[0] -= mvspeed * math.sin(math.pi * (Euler[0] / 180) - 90)
avatar.setPosition(p)
avatar.state(13)
# t——向前跑
elif viz.key.isDown('r'):
p[2] += mvspeed * math.cos(math.pi * (Euler[0] / 180)) * 2
p[0] += mvspeed * math.sin(math.pi * (Euler[0] / 180)) * 2
avatar.setPosition(p)
avatar.state(11)
# e——蹲下
elif viz.key.isDown('e'):
avatar.state(10)
# 更新摄像机位置
p[1] = 2
p[0] -= R * math.sin(math.pi * (Euler[0] / 180))
p[2] -= R * math.cos(math.pi * (Euler[0] / 180))
view.setPosition(p)
# 时钟三维导入
# 表盘——plate、时针——hour、分针——minute、秒针——second
# 设置初始的俯仰角为-90,blender模型为平放
plate = viz.add('biaopan.obj', pos=(0, 4.5, 9.9), euler=(0, -90, 0), scale=(0.3, 0.3, 0.3))
hour = viz.add('shizhen.obj', pos=(0, 4.5, 9.76), euler=(0, -90, 0), scale=(0.3, 0.3, 0.2))
minute = viz.add('fenzhen.obj', pos=(0, 4.5, 9.73), euler=(0, -90, 0), scale=(0.3, 0.3, 0.2))
second = viz.add('miaozhen.obj', pos=(0, 4.5, 9.7), euler=(0, -90, 0), scale=(0.3, 0.3, 0.2))
# 时钟控制
def clock():
# 获取当前系统时间
localtime = time.localtime()
# 时针角度设置
hour.setEuler(90, localtime.tm_hour * 30 + localtime.tm_min * 0.5 + localtime.tm_sec * 360 / 43200, 90)
# 分针角度设置
minute.setEuler(90, localtime.tm_min * 6 + localtime.tm_sec * 0.1, 90)
# 秒针角度设置
second.setEuler(90, localtime.tm_sec * 6, 90)
# 人物定时器
vizact.ontimer(0.01, UpdatePerson)
# 鸟定时器
vizact.ontimer(1, birdMove)
# 时钟定时器
vizact.ontimer(0.5, clock)
# 定时器回调函数
viz.callback(viz.MOUSE_MOVE_EVENT, onMouseMove)