多通道高通量实时处理单元详细方案设计报告
前端时间,做了一个项目,编写了相关的技术方案设计报告,项目的技术细节虽不能透漏,但这个设计报告做的很好,在此,贡献出来,给有相关需求的同事们做个参考,整个报告84页,2万多字,需要的找我索要完整的资料。
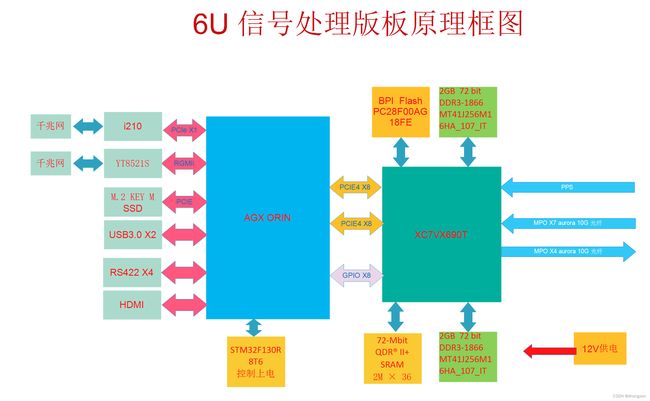
在本方案中,多通道高通量实时处理单元主要由两部分组成,GPU单元和FPGA单元。GPU单元选用Nvidia AGX Orin 64G处理器,FPGA单元选用Xilinx Virtex®-7系列FPGA XC7VX690T-2FFG1761i。GPU单元连接了两路网络、4路RS422和SSD存储,配有一个HDMI显示、两个USB3.0接口,由STM32F130R8T6 单片机控制上电。FPGA单元连接了双通道DDR3-1866,每通道2GB DDR3 MT41J256M16HA_107_IT存储器,用于实现光纤数据的收发存储。连接了2M X 36 72Mbit QDR SRAM,BPI Flash PC28F00AG18FE,用于实现数据的存储和FPGA的配置。连接了MPO 7×aurora和MPO 4×aurora,接收回波数据、同步数据和转发回波数据。此外,还有用于接收秒脉冲的SMA接口。GPU单元和FPGA单元通过两个PCIe Gen3 X8 连接,实现数据交互带宽≮16GB/s的要求。实时处理单元原理框图如图 2.1所示。
目 录
1. 设计输入··· 1
1.1 概述··· 1
1.2 技术要求··· 1
1.2.1 功能要求··· 1
1.2.1.1 网络控制功能··· 1
1.2.1.2 高速数据收发功能··· 1
1.2.1.3 同步处理功能··· 1
1.2.1.4 组合导航功能··· 2
1.2.1.5 实时处理功能··· 2
1.2.1.6 本地存储功能··· 2
1.2.1.7 数传通信功能··· 2
1.2.1.8 看门狗功能··· 2
1.2.2 指标要求··· 2
1.2.3 接口要求··· 3
1.2.4 外形及结构要求··· 4
1.2.5 环境适应性要求··· 4
1.2.5.1 工作温度··· 4
1.2.5.2 随机振动··· 4
2. 总体设计··· 5
2.1 系统组成··· 5
2.2 系统互联··· 6
2.3 工作原理··· 6
2.4 工作流程··· 7
2.5 工作模式··· 7
3. 关键技术论证··· 9
3.1 功能需求论证··· 9
3.1.1 网络控制··· 9
3.1.2 高速数据收发··· 9
3.1.3 同步处理··· 9
3.1.4 组合导航··· 9
3.1.5 实时处理··· 9
3.1.6 本地存储··· 10
3.1.7 数传通信··· 10
3.1.8 看门狗··· 10
3.2 技术指标论证··· 10
3.2.1 单精度浮点运算能力··· 10
3.2.2 板载DDR容量··· 11
3.2.3 板载存储容量··· 12
3.2.4 板载存储带宽··· 12
3.2.5 模块内数据交互带宽··· 13
3.2.6 数据输入带宽··· 21
3.2.7 功耗··· 23
3.2.8 重量··· 24
3.2.9 供电··· 24
4. 详细设计方案··· 25
4.1 主要元器件选型及电路设计··· 25
4.1.1 GPU·· 25
4.1.2 FPGA选型··· 30
4.1.3 MPO光模块选型··· 32
4.1.4 DDR和QDR选型··· 34
4.1.5 电源设计··· 37
4.1.6 网络设计··· 44
4.1.7 时钟设计··· 46
4.1.8 FPGA配置设计··· 47
4.2 接口设计及引脚定义··· 50
4.2.1 接口设计··· 50
4.2.2 J30J-51ZKW引脚定义··· 50
4.2.3 MPO光纤接收模块··· 52
4.2.4 MPO光纤发射模块··· 55
4.3 功能软件设计··· 56
4.3.1 组合导航··· 56
4.3.1.1 功能算法框架··· 56
4.3.1.2 EKF组合定位算法··· 58
4.3.1.3 IMU机械编排算法··· 58
4.3.1.4 软件设计··· 59
4.3.2 基于FPGA的DBF运算··· 61
4.3.2.1 DBF接收原理··· 61
4.3.2.2 基于FPGA的传统实现方法··· 62
4.3.2.3 基于FPGA的DBF通用实现方法··· 62
4.4 结构设计··· 64
4.5 六性设计及措施··· 65
4.5.1 可靠性··· 65
4.5.2 安全性··· 66
4.5.3 维修性··· 67
4.5.4 测试性和保障性··· 67
4.5.5 环境适应性··· 68
4.6 主要指标测试方案··· 68
4.6.1 性能指标测试方案··· 68
4.6.2 环境适应性要求测试方案··· 69
4.6.2.1 高低温测试··· 69
4.6.2.2 振动测试··· 71
5. 设计符合性··· 73
6. 研制计划··· 75
7. 交付清单··· 76
- 设计输入
- 概述
本报告提出了详细的多通道高通量实时处理单元设计思路,旨在为实时处理单元硬件设计提供参考。文中明确了实时处理单元技术要求,从功能、指标、接口、外形结构和环境适应性等方面规定了需要达到的设计目标。给出了实时处理单元总体设计:介绍了系统组成,系统互联,工作原理、流程、模式。对关键的功能、性能指标进行了详细的论证。制定了实时处理单元的详细设计方案,完成了元器件选型,提供了重要元器件的电路设计图,给出了接口引脚定义,给出了结构设计思路和六性、三化保障措施,制定了详细指标的测试方案,保证实时处理单元的设计的可能性。文档最后,同时明确了实时处理单元设计的符合性,提供了研制计划,明确了交付清单。全文要求明确,设计详细可行,计划清晰,能够有效指导多通道高通量实时处理单元的设计。
-
- 技术要求
- 功能要求
- 网络控制功能
- 功能要求
- 技术要求
模块支持网络接口(千兆网),通过网口实现对处理模块的指令控制、状态收发以及处理结果的传输。
高速数据收发功能
模块支持光纤高速互联接口,通过高速光纤接口实现对AD采集原始数据的接收,并通过光纤接口转发给数据存储设备。
同步处理功能
能够利用输入的PPS信号、直达波数据进行同步解算处理,对回波进行同步补偿处理。
组合导航功能
能够通过串口接收IMU数据和北斗数据,并进行组合导航解算。
实时处理功能
单个实时处理单元能够对输入的96路回波进行DBF处理,输出128路数据,并对DBF后的数据、直达波同步数据、IMU数据进行单精度及双精度浮点数的高能效实时处理,实时性满足指标要求,即在规定的时间内完成目标探测算法对指定数据量的实时处理并输出实时探测目标结果。
本地存储功能
模块具有板上存储功能,可以将实时探测处理结果以及组合导航数据存储到本地SSD硬盘。
数传通信功能
模块能够与数传模块通信(网络或串口),将实时探测结果通过数传模块输出。
看门狗功能
模块具备在逻辑出现故障异常情况下的自动复位功能,可以使系统恢复到初始上电状态。
指标要求
多通道高通量实时处理单元指标要求如表 1.1所示。
表 1.1 多通道高通量实时处理单元指标要求一览表
| 序号 |
指标名称 |
指标要求 |
备注 |
| 1 |
单精度浮点运算能力 |
≥4TFLOPS |
单套 |
| 2 |
板载DDR容量 |
≥64GB |
单套 |
| 3 |
板载存储容量 |
≥1TB |
单套 |
| 4 |
板载存储带宽 |
≥700MB/s |
单套 |
| 5 |
模块内数据交互带宽 |
≥16GB/s |
单套 |
| 6 |
数据输入带宽 |
≥4.5GB/s |
单套 |
| 7 |
功耗 |
≤70W |
单套 |
| 8 |
重量 |
≤2kg |
单套 |
| 9 |
供电 |
12V |
接口要求
多通道高通量实时处理单元指标要求如所示。
表 1.2 多通道高通量实时处理单元接口要求一览表
| 序号 |
接口名称 |
物理形式 |
接口协议 |
功能与要求 |
| 1 |
网口1 |
RJ45/J30J |
TCP |
用于模块监控,速率不低于60MB/s,两种接口通路可切换 |
| 2 |
网口2 |
RJ45/J30J |
TCP |
用于高速数传,速率不低于60MB/s,两种接口同路可切换 |
| 3 |
串口1 |
J30J |
RS422 |
用于IMU数据接收,波特率可兼容到460800bps |
| 4 |
串口2 |
J30J |
RS422 |
用于低速数传 |
| 5 |
串口3 |
J30J |
RS422 |
用于调试 |
| 6 |
串口4 |
J30J |
RS422 |
预留 |
| 7 |
光纤接口1 |
MPO |
7×aurora |
用于回波数据与同步数据接收,线速率≥10Gbps,其中6X用于回波数据接收,1X用于同步数据接收 |
| 8 |
光纤接口2 |
MPO |
4×aurora |
用于转发回波数据,线速率≥10Gbps |
| 9 |
TTL脉冲 |
SMA |
0-5V |
用于接收PPS信号 |
| 10 |
电源 |
J30J |
12V |
用于供电 |
外形及结构要求
6U,≤2kg
- 环境适应性要求
- 工作温度
-10℃~+60℃,环境气压5kPa,散热风扇具备在-10℃条件下的工作能力。
AGX Orin模块工业级工作温度-40℃~+85℃. AGX Orin模块工作温度-20℃~+80℃,都能满足-10℃~+60℃的环境需求。
随机振动
试验持续时间30min,振动谱参考GJB3493中II、III类运输条件。
2、总体设计
2.1系统组成