【Applied Algebra】物理学中的群论漫谈1:群论基础
物理学中的群论漫谈1:群论基础与希尔伯特空间
我准备开一个新系列谈谈群论在物理学中的应用,这样有两个好处:一是可以明白群论以及相关数学概念的具体应用,以此来举一反三懂得这些理论工具如何使用;而是可以通过这样的应用例子反过来更好地理解这些代数概念;参考书是约什(A.W.Joshi)的<<物理学中的群论基础>>,因此符号我们沿用这本书的习惯.
群理论
一个群是一些不同元素的集合, G ≡ { E , A G \equiv\{E, A G≡{E,A, B , C , D , ⋯ } B, C, D, \cdots\} B,C,D,⋯}, 这些元素被赋予一合成法则(如加法, 乘法, 矩阵乘法等),满足下列性质:
i) G G G 中的任意两个元素 A A A 和 B B B 在给定法则下合成得到 的元素仍然属于 G G G, 即
A ∘ B ∈ G , ∀ A , B ∈ G A \circ B \in G, \forall A, B \in G A∘B∈G,∀A,B∈G
这一性质叫做群的封闭性;
ii) 存在单位元素(单位元或恒等元) E ∈ G E \in G E∈G, 使得对所 有的 A ∈ G A \in G A∈G:
E ∘ A = A ∘ E = A E \circ A=A \circ E=A E∘A=A∘E=A
iii) 对任意元素 A ∈ G A \in G A∈G, 存在一个唯一的元素 B ∈ G B \in G B∈G, 使 得
∀ A ∈ G : ∃ B ∈ G ∋ A ∘ B = B ∘ A = E \forall A \in G: \exists B \in G \ni A \circ B=B \circ A=E ∀A∈G:∃B∈G∋A∘B=B∘A=E
B B B 叫做 A A A 的逆 (逆元), A A A 也叫做 B B B 的逆.
iv) 群元素的合成法则满足结合律, 即对任意 A , B A, B A,B, c ∈ G c \in G c∈G:
A ∘ ( B ∘ C ) = ( A ∘ B ) ∘ C , ∀ A , B , C ∈ G A \circ(B \circ C)=(A \circ B) \circ C, \forall A, B, C \in G A∘(B∘C)=(A∘B)∘C,∀A,B,C∈G
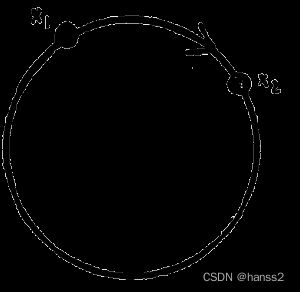
(变换群) 物理学家特别感兴趣的是物理系统的变换群.使物理系统保持不变的变换叫做系统的对称变换.例如,一个圆绕通过其中心并垂直于圆平面的轴的转动是它的对称变换.在一个分子中,两个相同原子的置换对分子来说也是对称变换.

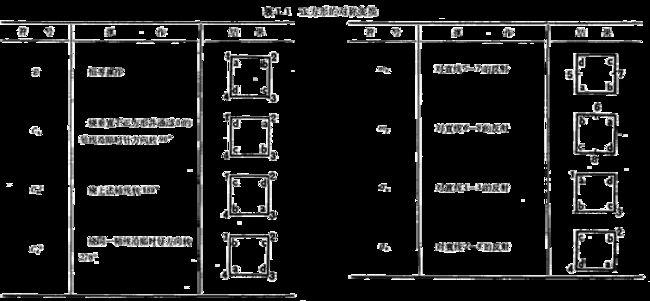
现在我们考虑对如上标记过各点位置的正方形进行变换的群,也就是如下这样的群(读者可以尝试根据定义验证这是一个群,证明留作习题):
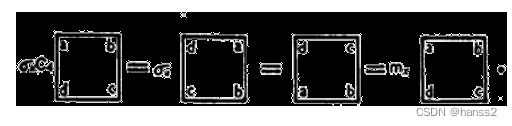
比如我们可以验证 σ u C 4 = m x \sigma_u C_4=m_x σuC4=mx:
还有比较复杂的运算比如逆元 ( C 4 ) − 1 = C 4 3 (C_4)^{-1}=C_4^3 (C4)−1=C43 或结合律 C 4 C 4 3 = C 4 3 C 4 = E C_4 C_4^3=C_4^3 C_4=E C4C43=C43C4=E:

考察如下的群元素关系:
A − 1 B A = C A^{-1}BA=C A−1BA=C
其中 A A A, B B B 和 C C C 是群的元素.当两元素 B B B 和 C C C 之间存在这样的关系时,它们叫做共轭元素,上述运算叫做 B B B 通过 A A A 的相似变换.显然:
A C A − 1 = B ACA^{-1}=B ACA−1=B
不难得出 C 4 v C_{4v} C4v 群元素之间的这种关系.例如:
C 4 − 1 m x C 4 = m y C_4^{-1} m_x C_4=m_y C4−1mxC4=my
这表明 m x m_x mx 和 m y m_y my 互为共轭.共轭在矩阵论里其实就对应了相似矩阵,而在离散数学里我们也学过二元关系,其实共轭就是群上的一种二元关系;那么类比二元关系和划分的概念可知, 可以把一个群化分成一些集合, 使得每一集 合中的所有元素都相互共轭, 但属于不同集合的两元素互不共轭. 这样的集合叫做群的共轭类或简称类. C 4 v C_{4 v} C4v 的类(划分)是:
( E ) , ( C 4 , C 4 3 ) , ( C 4 2 ) , ( m x , m y ) , ( σ u , σ v ) (E),(C_4, C_4^3),(C_4^2),(m_x, m_y),(\sigma_u, \sigma_v) (E),(C4,C43),(C42),(mx,my),(σu,σv)
(群的直积) 令 H = ( H 1 ≡ E , H 2 , H 3 , ⋯ , H h ) H=(H_1 \equiv E, H_2, H_3, \cdots, H_h) H=(H1≡E,H2,H3,⋯,Hh) 是 h h h 阶群, K = ( K 1 ≡ E , K 2 , K 3 ⋯ K k ) K=(K_1 \equiv E, K_2, K_3 \cdots K_k) K=(K1≡E,K2,K3⋯Kk) 是 k k k 阶群,又设:
i) H H H 和 K K K 除 E E E 外无 其他公共元素;
ii) H H H 中的每一元素都与 K K K 中每一元素对易(即乘法可交换);
我们定义 H H H 和 K K K 两群的直积为阶等于 g = h k g=hk g=hk 的群 G G G, 其元素是 H H H 的每一元素和 K K K 的每一元素的积. 群的直积为:
G = H ⊗ K = ( E , E K 2 , E K 3 , ⋯ , E K k , H 2 E , H 2 K 2 , ⋯ , H 2 K k , ⋯ , H h K k ) G=H \otimes K=(E, E K_2, E K_3, \cdots, E K_k, H_2 E, H_2 K_2, \cdots, H_2 K_k, \cdots, H_h K_k) G=H⊗K=(E,EK2,EK3,⋯,EKk,H2E,H2K2,⋯,H2Kk,⋯,HhKk)
C 4 v C_{4v} C4v的子群可作为这一概念的简单例子.例如:
( E , m x ) ⊗ ( E , m y ) = ( E , C 4 2 , m x , m y ) (E, m_x) \otimes(E, m_y)=(E, C_4^2, m_x, m_y) (E,mx)⊗(E,my)=(E,C42,mx,my)
另一个例子来自机器人手臂,假设一个不带夹头的机械手臂的变换群是 H H H,而可转动的夹头的变换群是 K K K,这里的变换指的就是具备运动自由度的部位的转动,那么连接了夹头的机械手臂最终的变换群就是对应群的直积 G = H ⊗ K G=H \otimes K G=H⊗K: