STM32使用QUADSPI读写外部Nor Flash(以W25Q64为例)
使用QUADSPI读写W25Q64
-
- QUADSPI介绍
- 硬件连接
-
-
- 双闪存模式禁止
- 双闪存模式使能
-
- QUADSPI命令序列
-
-
- 指令阶段
- 地址阶段
- 交替字节阶段
- 空指令周期阶段
- 数据阶段
-
- QUADSPI主要信号接口协议模式
-
-
- 单线SPI模式
- 双线SPI模式
- 四线SPI模式
-
- 使用QUADSPI操作W25Q64
-
-
- 发送命令函数
- 状态轮询函数
- 读ID函数
- QUADSPI模式使能函数
- 写使能函数
- 全片擦除函数
- 扇区擦除函数
- 读数据函数
- 页写函数
- 扇区写函数
- 内存映射函数
- 测试
-
QUADSPI介绍
QUADSPI 是一种专用的通信接口,连接单、双或四(条数据线) SPI Flash 存储介质。该接
口可以在以下三种模式下工作:
①间接模式:使用 QUADSPI 寄存器执行全部操作。
②状态轮询模式:周期性读取外部 Flash 状态寄存器,而且标志位置 1 时会产生中断(如擦除或烧写完成,会产生中断)。
③内存映射模式:外部 Flash 映射到微控制器地址空间,从而系统将其视作内部存储器。
采用双闪存模式时,将并行访问两个 Quad-SPI Flash,可同时发送/接收 8 位数据,吞吐量和容量均可提高二倍。
硬件连接
Nor Flash以W25Q64为例:

双闪存模式禁止

双闪存模式使能

双闪存模式不是所有含有QUADSPI的MCU都支持的,因为使用双闪存模式需要更多的IO口,对于一些IO口较少的MCU型号就没有那么多引脚可以复用为QUADSPI,具体可以看一下MCU的数据手册,确认一下是不是能连接第二个Flash。另外使用QUADSPI的话片选引脚就不能像标准SPI一样可以随意指定引脚,必须要使用指定的引脚,这个时候片选是由硬件完成的。

QUADSPI命令序列
QUADSPI 通过命令与 Flash 通信 每条命令包括指令、地址、交替字节、空指令和数据这五个阶段。任一阶段均可跳过,但至少要包含指令、地址、交替字节或数据阶段之一。

指令阶段
这一阶段,将在 QUADSPI_CCR[7:0] 寄存器的 INSTRUCTION 字段中配置的一条 8 位指令发送到 Flash,指定待执行操作的类型。
尽管大多数 Flash 从 IO0/SO 信号(单线 SPI 模式)只能以一次 1 位的方式接收指令,但指令阶段可选择一次发送 2 位(在双线 SPI 模式中通过 IO0/IO1)或一次发送 4 位(在四线SPI 模式中通过 IO0/IO1/IO2/IO3)。这可通过 QUADSPI_CCR[9:8] 寄存器中的 IMODE[1:0]
字段进行配置。
若 IMODE = 00,则跳过指令阶段,命令序列从地址阶段(如果存在)开始。
地址阶段
在地址阶段,将1-4 字节发送到Flash,指示操作地址。待发送的地址字节数 在QUADSPI_CCR[13:12] 寄存器的 ADSIZE[1:0] 字段中进行配置。在间接模式和自动轮询模式下,待发送的地址字节在 QUADSPI_AR 寄存器的 ADDRESS[31:0] 中指定。在内存映射模式下,则通过 AHB(来自于 Cortex® 或 DMA)直接给出地址。
地址阶段可一次发送 1 位(在单线 SPI 模式中通过 SO)、 2 位(在双线 SPI 模式中通过 IO0/IO1)或 4 位(在四线 SPI 模式中通过 IO0/IO1/IO2/IO3)。这可通过QUADSPI_CCR[11:10] 寄存器中的 ADMODE[1:0] 字段进行配置。
若 ADMODE = 00,则跳过地址阶段,命令序列直接进入下一阶段(如果存在)。
交替字节阶段
在交替字节阶段,将 1-4 字节发送到 Flash,一般用于控制操作模式。待发送的交替字节数在 QUADSPI_CCR[17:16] 寄存器的 ABSIZE[1:0] 字段中进行配置。待发送的字节在QUADSPI_ABR 寄存器中指定。
交替字节阶段可一次发送1位(在单线 SPI 模式中通过 SO)、2位(在双线 SPI 模式中 通 过 IO0/IO1)或4位(在四线 SPI 模 式 中 通 过 IO0/IO1/IO2/IO3)。这可通过QUADSPI_CCR[15:14] 寄存器中的 ABMODE[1:0] 字段进行配置。
若 ABMODE = 00,则跳过交替字节阶段,命令序列直接进入下一阶段(如果存在)。
交替字节阶段存在仅需发送单个半字节而不是一个全字节的情况,比如采用双线模式并且仅使用两个周期发送交替字节时。在这种情况下,固件可采用四线模式 (ABMODE = 11) 并发送一个字节,方法是 ALTERNATE 的位 7 和 3 置“1”( IO3 保持高电平)且位 6 和 2 置“0”( IO2 线保持低电平)。此时,半字节的高 2 位存放在 ALTERNATE 的位 4:3,低 2位存放在位 1 和 0 中。例如,如果半字节 2 (0010) 通过IO0/IO1 发送,则 ALTERNATE 应设置为 0x8A (1000_1010)。
空指令周期阶段
在空指令周期阶段,给定的 1-31 个周期内不发送或接收任何数据,目的是当采用更高的时钟频率时,给Flash留出准备数据阶段的时间。这一阶段中给定的周期数在QUADSPI_CCR[22:18] 寄存器的 DCYC[4:0] 字段中指定。在 SDR 和 DDR 模式下,持续时间被指定为一定个数的全时钟周期。
若 DCYC 为零,则跳过空指令周期阶段,命令序列直接进入数据阶段(如果存在)。
空指令周期阶段的操作模式由 DMODE 确定。
为确保数据信号从输出模式转变为输入模式有足够的“周转”时间,使用双线和四线模式从Flash 接收数据时,至少需要指定一个空指令周期。
数据阶段
在数据阶段,可从 Flash 接收或向其发送任意数量的字节。
在间接模式和自动轮询模式下,待发送/接收的字节数在 QUADSPI_DLR 寄存器中指定。
在间接写入模式下,发送到 Flash 的数据必须写入 QUADSPI_DR 寄存器。在间接读取模式下,通过读取 QUADSPI_DR 寄存器获得从 Flash 接收的数据。
在内存映射模式下,读取的数据通过 AHB 直接发送回 Cortex 或 DMA。
数据阶段可一次发送 / 接收 1 位(在单线 SPI 模式中通过 SO)、 2 位(在双线 SPI 模式中通过 IO0/IO1)或 4 位(在四线 SPI 模式中通过 IO0/IO1/IO2/IO3)。这可通过QUADSPI_CCR[15:14] 寄存器中的 ABMODE[1:0] 字段进行配置。
若 DMODE = 00,则跳过数据阶段,命令序列在拉高 nCS 时立即完成。这一配置仅可用于仅间接写入模式。
QUADSPI主要信号接口协议模式
主要的信号模式为3种,单线SPI,就是标准SPI;双线SPI,比如数据阶段使用两条信号线;还有一种四线SPI,比如数据阶段使用四条信号线。双线SPI和四线SPI时信号线为双向IO,也就是说要么类似于标准SPI的MISO,要么类似于标准SPI的MOSI,工作方式为半双工。
单线SPI模式
传统 SPI 模式允许串行发送/接收单独的 1 位。在此模式下,数据通过 SO 信号(其 I/O 与IO0 共享)发送到 Flash。从 Flash 接收到的数据通过 SI(其 I/O 与 IO1 共享)送达。
通过将( QUADSPI_CCR 中的) IMODE/ADMODE/ABMODE/DMODE 字段设置为 01,可对不同的命令阶段分别进行配置,以使用此单个位模式。
在每个已配置为单线模式的阶段中:
①IO0 (SO) 处于输出模式
②IO1 (SI) 处于输入模式(高阻抗)
③IO2 处于输出模式并强制置“0”(以禁止“写保护”功能)
④IO3 处于输出模式并强制置“1”(以禁止“保持”功能)
若 DMODE = 01,这对于空指令阶段也同样如此。
双线SPI模式
在双线模式下,通过 IO0/IO1 信号同时发送/接收两位。
通过将 QUADSPI_CCR 寄存器的 IMODE/ADMODE/ABMODE/DMODE 字段设置为 10,可对不同的命令阶段分别进行配置,以使用双线 SPI 模式。
在每个已配置为双线模式的阶段中:
①IO0/IO1 在数据阶段进行读取操作时处于高阻态(输入),在其他情况下为输出
②IO2 处于输出模式并强制置“0”
③IO3 处于输出模式并强制置“1”
在空指令阶段,若 DMODE = 01,则 IO0/IO1 始终保持高阻态。
四线SPI模式
在四线模式下,通过 IO0/IO1/IO2/IO3 信号同时发送/接收四位。
通过将 QUADSPI_CCR 寄存器的 IMODE/ADMODE/ABMODE/DMODE 字段设置为 11,可对不同的命令阶段分别进行配置,以使用四线 SPI 模式。
在每个已配置为四线模式的阶段中, IO0/IO1/IO2/IO3 在数据阶段进行读取操作时均处于高阻态(输入),在其他情况下为输出。
在空指令阶段中,若 DMODE = 11,则 IO0/IO1/IO2/IO3 均为高阻态。
IO2 和 IO3 仅用于 Quad SPI 模式,如果未配置任何阶段使用四线 SPI 模式,即使 QUADSPI激活,对应 IO2 和 IO3 的引脚也可用于其他功能。
使用QUADSPI操作W25Q64
使用STM32CubeMX配置生成QSPI代码,以四线SPI为例。
模式选择:

引脚选择:

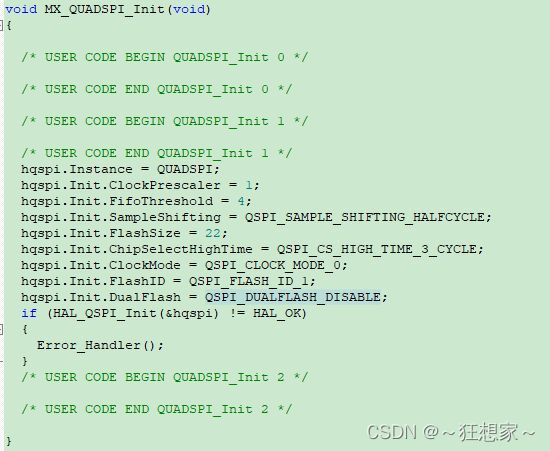
QSPI参数设置:

ClockPrescaler:该参数定义基于 AHB 时钟生成 CLK 所用的分频系数(值 + 1),QSPI是挂载在AHB总线上的,AHB时钟频率为80MHz,设置为1时,QPSI的速率为40MHz(80÷2)。W25Q64除读操作外支持的最大速率是133Mhz,跟电压有关系;读操作最大为50Mhz。这里指的是使用标准SPI的速率,使用双线SPI和四线SPI时的速率是相对于单线SPI来说的。

FifoThreshold:该参数定义在间接模式下 FIFO 中将导致 FIFO 阈值标志(FTF, QUADSPI_SR[2])置 1 的字节数阈值。
在间接模式下,若达到 FIFO 阈值,或从 Flash 读取完成后, FIFO 中留有数据时,FTF置 1。只要阈值条件不再为“真”,FTF就自动清零。
在自动轮询模式下,每次读取状态寄存器时,FTF即置 1 ;读取数据寄存器时,FTF清零。
SampleShifting:默认情况下, QUADSPI 在 Flash 驱动信号后过半个 CLK 周期才对 Flash 驱动的数据采样。在外部信号延迟时,这有利于推迟数据采样。
FlashSize:该参数用于指定外部 SPI Flash 的特性,FSIZE+1 是对 Flash 寻址所需的地址位数。在间接模式下, Flash 容量最高可达 4GB(使用32 位进行寻址),但在内存映射模式下的可寻址空间限制为 256MB。W25Q64一共8M,8388608字节,也就是2的23次方,所以FSIZE应该设置为22。
![]()
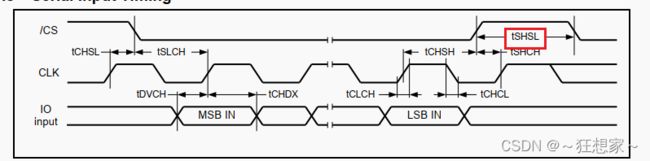
ChipSelectHighTime:片选拉高的时间,也就是在操作完W25Q64之后,片选线拉高取消选中SPI Flash的时间。在W25Q64手册中可以看到读操作释放最短时间10ns,擦除,写入等操作最小是50ns。QPSI时钟为40MHz时,一个clock为25ns,所以最少需要2个clock,因为手册中写的都是最小值,所以设置为3个clock,也就是75ns。

ClockMode:也就是模式0和模式3的选择(“模式 0”,在未进行任何操作时 CLK 保持低电平;“模式 3”,在未进行任何操作时 CLK 升至高电平)。
FlashID:只使用一个FLASH,所以就是默认的就可以,因为我用的这个MCU不支持挂两个SPI Flash,所以其实是不可选的。
DualFlash:双闪存模式禁止。
生成代码之后QSPI初始化函数如下:
发送命令函数
因为操作W25Q64是通过命令来实现的,所以就用一个专用的函数QSPI_SendCommand来发送命令。用到的命令有:
#define W25Q64_WRITE_ENABLE 0x06
#define W25Q64_READ_STATUS_REG1 0x05
#define W25Q64_READ_STATUS_REG2 0x35
#define W25Q64_WRITE_STATUS_REG1 0x01
#define W25Q64_WRITE_STATUS_REG2 0x31
#define W25Q64_SECTOR_ERASE 0x20
#define W25Q64_CHIP_ERASE 0xC7
#define W25Q64_MANUFACTURER_DEVICEID 0x90
#define W25Q64_QUAD_INPUT_PAGE_PROGRAM 0x32
#define W25Q64_FAST_READ_QUAD_OUTPUT 0x6B
static HAL_StatusTypeDef QSPI_SendCommand(uint32_t instruction,
uint32_t address,
uint32_t addressMode,
uint32_t addressSize,
uint32_t dummyCycles,
uint32_t nbData,
uint32_t dataMode,
uint32_t siooMode)
{
QSPI_CommandTypeDef sCommand = {0};
HAL_StatusTypeDef Status = HAL_OK;
sCommand.Instruction = instruction;
sCommand.InstructionMode = QSPI_INSTRUCTION_1_LINE;
sCommand.Address = address;
sCommand.AddressMode = addressMode;
sCommand.AddressSize = addressSize;
sCommand.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
sCommand.DummyCycles = dummyCycles;
sCommand.NbData = nbData;
sCommand.DataMode = dataMode;
sCommand.DdrMode = QSPI_DDR_MODE_DISABLE;
sCommand.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
sCommand.SIOOMode = siooMode;
Status = HAL_QSPI_Command(&hqspi, &sCommand, HAL_QSPI_TIMEOUT_DEFAULT_VALUE);
return Status;
}
参数说明:
instruction:指令
address:地址
addressMode:地址模式,也就是使用几根IO发送地址段。
addressSize:地址大小,也就是地址位数。
dummyCycles:空指令周期数,根据每个命令序列填写。如下图,Number of Clock右下角括号中表示分别使用的IO数。比如(1-4-4)表示指令阶段使用1个 IO,地址阶段使用4个 IO,数据阶段也是使用4个 IO。

nbData:数据字节数,在发送和读取的时候有用,读取/ 写入的字节数在数据长度寄存器 (QUADSPI_DLR) 中指定。如果 QUADSPI_DLR =
0xFFFFFFFF(全为“1”),则数据长度视为未定义, QUADSPI 将继续传输数据,直到到达(由 FSIZE 定义的) Flash 的结尾。如果不传输任何字节, DMODE (QUADSPI_CCR[25:24])应设置为 00。
dataMode:数据模式,也就是使用几根IO发送/接收数据段。
siooMode:发送指令模式,每次传输都需要指令段还是只有第一次发送需要(读写长数据时只用发送一次读写指令)。
状态轮询函数
状态轮询主要是判断当前操作是否完成,主要判断QUADSPI模式是否使能(QE位),写使能(WEL位),忙(BUSY)。使用状态轮询模式配上中断可以不用一直查询和等待状态改变,而是在产生需要的状态后产生中断。不过我这里用的是等待超时,没有使用中断。
在状态轮询模式下, QUADSPI 周期性启动命令以读取一定数量的状态字节(最多 4 个)。可屏蔽接收的字节以隔离一些状态位,从而在所选的位具有定义的值时可产生中断。
在状态轮询模式下, 主要设置的是状态屏蔽寄存器 (QUADSPI _PSMKR)和状态匹配寄存器 (QUADSPI _PSMAR)。MASK[31:0] (QUADSPI _PSMKR) 的内容用于屏蔽来自 Flash 的数据。如果 MASK[n] = 0,则屏蔽结果的位 n,从而不考虑该位。如果 MASK[n] = 1 并且位 [n] 的内容与 MATCH[n] (QUADSPI_PSMAR) 相同,说明存在位 n 匹配。
static void QSPI_AutoPollingMemReady(CHECK_STATE check)
{
QSPI_CommandTypeDef sCommand = {0};
QSPI_AutoPollingTypeDef sConfig = {0};
uint32_t timeout = 0;
if(check == NO_CHECK)
{
return;
}
sCommand.InstructionMode = QSPI_INSTRUCTION_1_LINE;
if(check == CHECK_QE)
sCommand.Instruction = W25Q64_READ_STATUS_REG2;
else
sCommand.Instruction = W25Q64_READ_STATUS_REG1;
sCommand.AddressMode = QSPI_ADDRESS_NONE;
sCommand.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
sCommand.DataMode = QSPI_DATA_1_LINE;
sCommand.DummyCycles = 0;
sCommand.NbData = 1;
sCommand.DdrMode = QSPI_DDR_MODE_DISABLE;
sCommand.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
sCommand.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
sConfig.MatchMode = QSPI_MATCH_MODE_AND;
sConfig.StatusBytesSize = 1;
sConfig.Interval = 0x10;
sConfig.AutomaticStop = QSPI_AUTOMATIC_STOP_ENABLE;
switch(check)
{
case CHECK_BUSY:
{
sConfig.Match = 0x00;
sConfig.Mask = 0x01;
timeout = HAL_QSPI_TIMEOUT_ERASE_VALUE;
}
break;
case CHECK_WEL:
{
sConfig.Match = 0x02;
sConfig.Mask = 0x03;
timeout = HAL_QSPI_TIMEOUT_DEFAULT_VALUE;
}
break;
case CHECK_QE:
{
sConfig.Match = 0x02;
sConfig.Mask = 0x02;
timeout = HAL_QSPI_TIMEOUT_DEFAULT_VALUE;
}
break;
default:
break;
}
HAL_QSPI_AutoPolling(&hqspi, &sCommand, &sConfig, timeout);
}
读ID函数
static uint16_t W25QXX_ReadID(void)
{
uint16_t id = 0;
QSPI_SendCommand(W25Q64_MANUFACTURER_DEVICEID,
0x000000,
QSPI_ADDRESS_1_LINE,
QSPI_ADDRESS_24_BITS,
0,
sizeof(uint16_t),
QSPI_DATA_1_LINE,
QSPI_SIOO_INST_EVERY_CMD);
QSPI_Receive((uint8_t *)&id);
return id;
}
QUADSPI模式使能函数
因为用的是四线SPI模式,需要需要确保QUADSPI模式使能,根据手册中的描述,出厂是默认使能的。

判断出厂有没有默认使能也可以通过W25Q64型号来判断,根据命名规则,最后一个字母如果是Q就是出厂默认使能。
static void W25QXX_EnterQspiMode(void)
{
uint8_t reg2 = 0;
QSPI_SendCommand(W25Q64_READ_STATUS_REG2,
0x000000,
QSPI_ADDRESS_NONE,
QSPI_ADDRESS_8_BITS,
0,
sizeof(uint8_t),
QSPI_DATA_1_LINE,
QSPI_SIOO_INST_EVERY_CMD);
QSPI_Receive((uint8_t *)®2);
if(!(reg2 & REG2_QE_BIT))
{
reg2 |= REG2_QE_BIT;
W25QXX_Write_Enable();
QSPI_SendCommand(W25Q64_WRITE_STATUS_REG2,
0x000000,
QSPI_ADDRESS_NONE,
QSPI_ADDRESS_8_BITS,
0,
sizeof(uint8_t),
QSPI_DATA_1_LINE,
QSPI_SIOO_INST_EVERY_CMD);
HAL_QSPI_Transmit(&hqspi, ®2,HAL_QSPI_TIMEOUT_DEFAULT_VALUE);
QSPI_AutoPollingMemReady(CHECK_QE);
}
}
写使能函数
static void W25QXX_Write_Enable(void)
{
QSPI_SendCommand(W25Q64_WRITE_ENABLE,
0x000000,
QSPI_ADDRESS_NONE,
QSPI_ADDRESS_8_BITS,
0,
0,
QSPI_DATA_NONE,
QSPI_SIOO_INST_EVERY_CMD);
QSPI_AutoPollingMemReady(CHECK_WEL);
}
全片擦除函数
void W25QXX_Erase_Chip(void)
{
W25QXX_Write_Enable();
QSPI_SendCommand(W25Q64_CHIP_ERASE,
0x000000,
QSPI_ADDRESS_NONE,
QSPI_ADDRESS_8_BITS,
0,
0,
QSPI_DATA_NONE,
QSPI_SIOO_INST_EVERY_CMD);
QSPI_AutoPollingMemReady(CHECK_BUSY);
}
扇区擦除函数
void W25QXX_Erase_Sector(uint32_t EraseAddr)
{
W25QXX_Write_Enable();
QSPI_SendCommand(W25Q64_SECTOR_ERASE,
EraseAddr,
QSPI_ADDRESS_1_LINE,
QSPI_ADDRESS_24_BITS,
0,
0,
QSPI_DATA_NONE,
QSPI_SIOO_INST_EVERY_CMD);
QSPI_AutoPollingMemReady(CHECK_BUSY);
}
读数据函数
void W25QXX_ReadData(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t ReadLen)
{
QSPI_SendCommand(W25Q64_FAST_READ_QUAD_OUTPUT,
ReadAddr,
QSPI_ADDRESS_1_LINE,
QSPI_ADDRESS_24_BITS,
8,
ReadLen,
QSPI_DATA_4_LINES,
QSPI_SIOO_INST_ONLY_FIRST_CMD);
QSPI_Receive(pBuffer);
}
页写函数
static void W25QXX_Write_Page(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t WriteLen)
{
W25QXX_Write_Enable();
QSPI_SendCommand(W25Q64_QUAD_INPUT_PAGE_PROGRAM,
WriteAddr,
QSPI_ADDRESS_1_LINE,
QSPI_ADDRESS_24_BITS,
0,
WriteLen,
QSPI_DATA_4_LINES,
QSPI_SIOO_INST_ONLY_FIRST_CMD);
HAL_QSPI_Transmit(&hqspi, pBuffer,HAL_QSPI_TIMEOUT_DEFAULT_VALUE);
QSPI_AutoPollingMemReady(CHECK_BUSY);
}
扇区写函数
void W25QXX_Write_Sector(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t WriteLen)
{
uint32_t WritePageNum = ((WriteLen%W25Q64_PAGE_NUM) == 0) ? (WriteLen/W25Q64_PAGE_NUM) : ((WriteLen/W25Q64_PAGE_NUM)+1);
for(uint8_t i = 0;i < WritePageNum;i++)
{
if(WriteLen > W25Q64_PAGE_NUM)
W25QXX_Write_Page(&pBuffer[i*W25Q64_PAGE_NUM],WriteAddr,W25Q64_PAGE_NUM);
else
W25QXX_Write_Page(&pBuffer[i*W25Q64_PAGE_NUM],WriteAddr,WriteLen);
WriteAddr += W25Q64_PAGE_NUM;
WriteLen -= W25Q64_PAGE_NUM;
}
}
内存映射函数
void W25QXX_EnterMemoryMappedMode(void)
{
QSPI_CommandTypeDef sCommand = {0};
QSPI_MemoryMappedTypeDef sMemMappedCfg = {0};
QSPI_AutoPollingMemReady(CHECK_BUSY);
sCommand.Instruction = W25Q64_FAST_READ_QUAD_OUTPUT;
sCommand.InstructionMode = QSPI_INSTRUCTION_1_LINE;
sCommand.Address = 0;
sCommand.AddressMode = QSPI_ADDRESS_1_LINE;
sCommand.AddressSize = QSPI_ADDRESS_24_BITS;
sCommand.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
sCommand.DummyCycles = 8;
sCommand.NbData = 0;
sCommand.DataMode = QSPI_DATA_4_LINES;
sCommand.DdrMode = QSPI_DDR_MODE_DISABLE;
sCommand.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
sCommand.SIOOMode = QSPI_SIOO_INST_ONLY_FIRST_CMD;
sMemMappedCfg.TimeOutActivation = QSPI_TIMEOUT_COUNTER_DISABLE;
if (HAL_QSPI_MemoryMapped(&hqspi, &sCommand, &sMemMappedCfg) != HAL_OK)
{
printf("MemMapped error\r\n");
}
}
测试
uint8_t aTxBuffer[] = " ****Memory-mapped QSPI5 communication**** ****Memory-mapped QSPI4 communication**** ****Memory-mapped QSPI3 communication**** ****Memory-mapped QSPI2 communication**** ****Memory-mapped QSPI1 communication**** ";
uint8_t aRxBuffer[256];
__IO uint8_t *qspi_addr = (__IO uint8_t *)(0x90000000);
/*以下main函数中调用*/
W25QXX_WriteData(aTxBuffer,0,sizeof(aTxBuffer));
W25QXX_ReadData(aRxBuffer,0,sizeof(aTxBuffer));
printf("%s\r\n",aRxBuffer);
W25QXX_EnterMemoryMappedMode();//进入内存映射模式
HAL_UART_Transmit(&huart2, (uint8_t *)qspi_addr, sizeof(aTxBuffer), HAL_MAX_DELAY);
