基于深度学习的人脸识别与检测方案
一、项目介绍前言
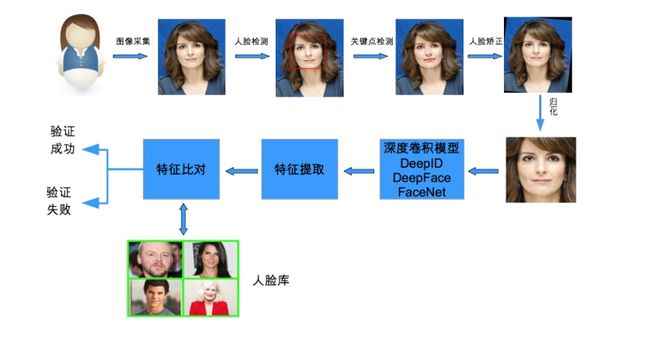
人脸识别作为一种生物特征识别技术,具有非侵扰性、非接触性、友好性和便捷性等优点。人脸识别通用的流程主要包括人脸检测、人脸裁剪、人脸校正、特征提取和人脸识别。人脸检测是从获取的图像中去除干扰,提取人脸信息,获取人脸图像位置,检测的成功率主要受图像质量,光线强弱和遮挡等因素影响。下图是整个人脸检测过程。
二、识别检测方法传统识别方法
(1)基于点云数据的人脸识别
(2)基于面部特征的3D人脸识别深度学习识别方法
(1)基于深度图的人脸识别
(2)基于RGB-3DMM的人脸识别
(3)基于RGB-D的人脸识别 本文方法关键点定位概述
一般人脸中有5个关键点,其中包括眼睛两个,鼻子一个,嘴角两个。还可以细致的分为68个关键点,这样的话会概括的比较全面,我们本次研究就是68个关键点定位。

上图就是我们定位人脸的68个关键点,其中他的顺序是要严格的进行排序的。从1到68点的顺序不能错误。项目解析 使用机器学习框架dlib做本次的项目。首先我们要指定参数时,要把dlib中的68关键点人脸定位找到。设置出来的68关键点人脸定位找到。并且设置出来。
from collecTIons import OrderedDict
import numpy as np
import argparse
import dlib
import cv2
首先我们导入工具包。其中dlib库是通过这个网址http://dlib.net/files/进行下载的。然后我们导入参数。
ap = argparse.ArgumentParser()
ap.add_argument(“-p”, “--shape-predictor”, required=True,
help=“path to facial landmark predictor”)
ap.add_argument(“-i”, “--image”, required=True,
help=“path to input image”)
args = vars(ap.parse_args())
这里我们要设置参数,--shape-predictor shape_predictor_68_face_landmarks.dat --image images/lanqiudui.jpg。
如果一张图像里面有多个人脸,那么我们分不同部分进行检测,裁剪出来所对应的ROI区域。我们的整体思路就是先检测人脸所在的一个区域位置,然后检测鼻子相对于人脸框所在的一个位置,比如说人的左眼睛在0.2w,0.2h的人脸框处。
FACIAL_LANDMARKS_68_IDXS = OrderedDict([
(“mouth”, (48, 68)),
(“right_eyebrow”, (17, 22)),
(“left_eyebrow”, (22, 27)),
(“right_eye”, (36, 42)),
(“left_eye”, (42, 48)),
(“nose”, (27, 36)),
(“jaw”, (0, 17))
])
这个是68个关键点定位的各个部位相对于人脸框的所在位置。分别对应着嘴,左眼、右眼、左眼眉、右眼眉、鼻子、下巴。
FACIAL_LANDMARKS_5_IDXS = OrderedDict([
(“right_eye”, (2, 3)),
(“left_eye”, (0, 1)),
(“nose”, (4))
])
如果是5点定位,那么就需要定位左眼、右眼、鼻子。0、1、2、3、4分别表示对应的5个点。
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor(args[“shape_predictor”])
加载人脸检测与关键点定位。加载出来。其中detector默认的人脸检测器。然后通过传入参数返回人脸检测矩形框4点坐标。其中predictor以图像的某块区域为输入,输出一系列的点(point locaTIon)以表示此图像region里object的姿势pose。返回训练好的人脸68特征点检测器。
image = cv2.imread(args[“image”])
(h, w) = image.shape[:2]
width=500
r = width / float(w)
dim = (width, int(h * r))
image = cv2.resize(image, dim, interpolaTIon=cv2.INTER_AREA)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
这里我们把数据读了进来,然后进行需处理,提取h和w,其中我们自己设定图像的w为500,然后按照比例同比例设置h。然后进行了resize操作,最后转化为灰度图。
rects = detector(gray, 1)
这里调用了detector的人脸框检测器,要使用灰度图进行检测,这个1是重采样个数。这里面返回的是人脸检测矩形框4点坐标。然后对检测框进行遍历
for (i, rect) in enumerate(rects):
# 对人脸框进行关键点定位
# 转换成ndarray
shape = predictor(gray, rect)
shape = shape_to_np(shape)
这里面返回68个关键点定位。shape_to_np这个函数如下。
def shape_to_np(shape, dtype=“int”):
# 创建68*2
coords = np.zeros((shape.num_parts, 2), dtype=dtype)
# 遍历每一个关键点
# 得到坐标
for i in range(0, shape.num_parts):
coords[i] = (shape.part(i).x, shape.part(i).y)
return coords
这里shape_to_np函数的作用就是得到关键点定位的坐标。
for (name, (i, j)) in FACIAL_LANDMARKS_68_IDXS.items():
clone = image.copy()
cv2.putText(clone, name, (10, 30), cv2.FONT_HERSHEY_SIMPLEX,
0.7, (0, 0, 255), 2)
# 根据位置画点
for (x, y) in shape[i:j]:
cv2.circle(clone, (x, y), 3, (0, 0, 255), -1)
# 提取ROI区域
(x, y, w, h) = cv2.boundingRect(np.array([shape[i:j]]))
roi = image[y:y + h, x:x + w]
(h, w) = roi.shape[:2]
width=250
r = width / float(w)
dim = (width, int(h * r))
roi = cv2.resize(roi, dim, interpolaTIon=cv2.INTER_AREA)
# 显示每一部分
cv2.imshow(“ROI”, roi)
cv2.imshow(“Image”, clone)
cv2.waitKey(0)
这里字典FACIAL_LANDMARKS_68_IDXS.items()是同时提取字典中的key和value数值。然后遍历出来这几个区域,并且进行显示具体是那个区域,并且将这个区域画圆。随后提取roi区域并且进行显示。后面部分就是同比例显示w和h。然后展示出来。
output = visualize_facial_landmarks(image, shape)
cv2.imshow(“Image”, output)
cv2.waitKey(0)
最后展示所有区域。 其中visualize_facial_landmarks函数就是:
def visualize_facial_landmarks(image, shape, colors=None, alpha=0.75):
# 创建两个copy
# overlay and one for the final output image
overlay = image.copy()
output = image.copy()
# 设置一些颜色区域
if colors is None:
colors = [(19, 199, 109), (79, 76, 240), (230, 159, 23),
(168, 100, 168), (158, 163, 32),
(163, 38, 32), (180, 42, 220)]
# 遍历每一个区域
for (i, name) in enumerate(FACIAL_LANDMARKS_68_IDXS.keys()):
# 得到每一个点的坐标
(j, k) = FACIAL_LANDMARKS_68_IDXS[name]
pts = shape[j:k]
# 检查位置
if name == “jaw”:
# 用线条连起来
for l in range(1, len(pts)):
ptA = tuple(pts[l - 1])
ptB = tuple(pts[l])
cv2.line(overlay, ptA, ptB, colors[i], 2)
# 计算凸包
else:
hull = cv2.convexHull(pts)
cv2.drawContours(overlay, [hull], -1, colors[i], -1)
# 叠加在原图上,可以指定比例
cv2.addWeighted(overlay, alpha, output, 1 - alpha, 0, output)
return output
这个函数是计算cv2.convexHull凸包的,也就是下图这个意思。

这个函数cv2.addWeighted是做图像叠加的。
src1, src2:需要融合叠加的两副图像,要求大小和通道数相等 alpha:src1 的权重 beta:src2 的权重 gamma:gamma 修正系数,不需要修正设置为 0 dst:可选参数,输出结果保存的变量,默认值为 None dtype:可选参数,输出图像数组的深度,即图像单个像素值的位数(如 RGB 用三个字节表示,则为 24 位),选默认值 None 表示与源图像保持一致。 dst = src1 × alpha + src2 × beta + gamma;上面的式子理解为,结果图像 = 图像 1× 系数 1+图像 2× 系数 2+亮度调节量。
【以上信息由艾博检测整理发布,如有出入请及时指正,如有引用请注明出处,欢迎一起讨论,我们一直在关注其发展!专注:CCC/SRRC/CTA/运营商入库】