import numpy as np
from matplotlib import pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from numpy import *
w = 0.5 #惯性因子[0,1]
c1 = 2 #学习因子
c2 = 2 #学习因子
partical_num = 100 #粒子数量
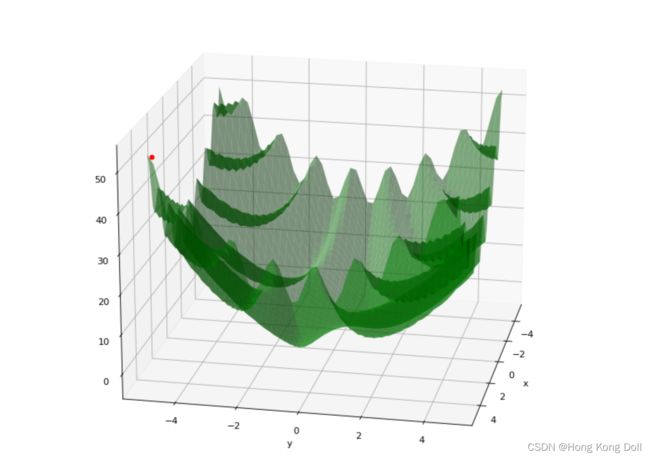
fun = '5 * sin(x * y) + x ** 2 + y ** 2' #目标函数
choice = 'min' #选择最大值还是最小值
x_limit = [-5,5]
y_limit = [-5,5]
vx = [-5,5] #x方向速度范围
vy = [-5,5] #y方向速度范围
iter_time = 50 #迭代次数
global_best = np.zeros((2,)) #全局最优
local_best = np.zeros((2,partical_num)) #每个粒子的历史最优
def f(fun,x,y): #目标函数
return eval(fun)
def init_pos_and_velocity(partical_num): #传入粒子总数,随机初始化位置和速度
pos = np.random.rand(2,partical_num)
pos[0,:] = pos[0,:] * (x_limit[1] - x_limit[0]) + x_limit[0]
pos[1,:] = pos[1,:] * (y_limit[1] - y_limit[0]) + y_limit[0]
velo = np.random.rand(2, partical_num)
velo[0, :] = velo[0, :] * (vx[1] - vx[0]) + vx[0]
velo[1, :] = velo[1, :] * (vy[1] - vy[0]) + vy[0]
return pos,velo
def update_pos_and_velo(pos,velo): #更新位置和速度
#更新速度
for i in range(partical_num):
delta_vx = c1 * np.random.rand() * (local_best[0,i] - pos[0,i]) + c2 * np.random.rand() * (global_best[0] - pos[0,i])
delta_vy = c1 * np.random.rand() * (local_best[1,i] - pos[1,i]) + c2 * np.random.rand() * (global_best[1] - pos[1,i])
velo[0,i] = (w * velo[0,i] + delta_vx) if (vx[0] < (w * velo[0,i] + delta_vx) < vx[1]) else np.random.rand() * (vx[1] - vx[0]) + vx[0] #越界检测
velo[1,i] = (w * velo[1,i] + delta_vy) if (vy[0] < (w * velo[1,i] + delta_vy) < vy[1]) else np.random.rand() * (vy[1] - vy[0]) + vy[0]
for i in range(partical_num):
pos[0,i] = (pos[0,i] + velo[0,i]) if x_limit[0] < (pos[0,i] + velo[0,i]) < x_limit[1] else (x_limit[1] - x_limit[0]) + x_limit[0] #越界检测
pos[1,i] = (pos[1,i] + velo[1,i]) if y_limit[0] < (pos[1,i] + velo[1,i]) < y_limit[1] else (y_limit[1] - y_limit[0]) + y_limit[0]
return pos,velo
def update_global_best(pos): #更新全局最优
global global_best
z = f(fun,pos[0,:],pos[1,:])
if choice == 'max':
if np.max(z) > f(fun,global_best[0],global_best[1]):
global_best = pos[:,np.argmax(z)]
else:
if np.min(z) < f(fun, global_best[0], global_best[1]):
global_best = pos[:, np.argmin(z)]
def update_local_best(pos,local_best): #更新历史最优
if choice == 'max':
index = f(fun,pos[0,:],pos[1,:]) > f(fun,local_best[0,:],local_best[1,:])
local_best[:,index] = pos[:,index]
else:
index = f(fun, pos[0, :], pos[1,:]) < f(fun, local_best[0,:], local_best[1,:])
local_best[:, index] = pos[:, index]
pos,velo = init_pos_and_velocity(partical_num) #初始化粒子群
update_local_best(pos,local_best)
update_global_best(pos)
for i in range(iter_time):
pos,velo = update_pos_and_velo(pos,velo)
update_local_best(pos,local_best)
update_global_best(pos)
print('极值为: x = ',global_best[0],'y = ',global_best[1])
figure = plt.figure(figsize = (10,8),dpi = 80)
# 新建一个3d绘图对象
ax = Axes3D(figure)
# 定义x,y 轴名称
plt.xlabel("x")
plt.ylabel("y")
x = np.arange(x_limit[0],x_limit[1],(x_limit[1] - x_limit[0]) / 50)
y = np.arange(y_limit[0],y_limit[1],(y_limit[1] - y_limit[0]) / 50)
x,y = np.meshgrid(x,y)
z = f(fun,x,y)
ax.plot_surface(x,y,z, rstride=1, cstride=1, color = 'green',alpha = 0.5)
ax.scatter(global_best[0],global_best[1],f(fun,global_best[0],global_best[1]),color = 'red')
plt.show()