grad cam的直接使用【实测成功】
仅作为记录,大佬请跳过。
完全参考大佬github:传送门
文章目录
- 所有代码
- 数据
- 运行即可
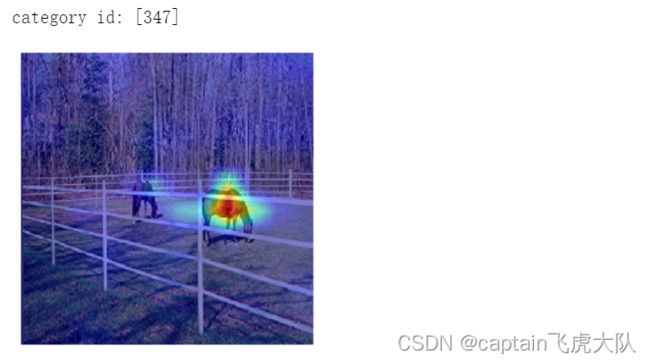
- 展示
所有代码
import os
os.environ["CUDA_VISIBLE_DEVICES"] = '2/'
import cv2
import numpy as np
import torch
import torch.nn as nn
from PIL import Image
from torchvision import transforms
from torchvision import models
import matplotlib.pyplot as plt
class ActivationsAndGradients:
""" Class for extracting activations and
registering gradients from targeted intermediate layers """
def __init__(self, model, target_layers, reshape_transform):
self.model = model
self.gradients = []
self.activations = []
self.reshape_transform = reshape_transform
self.handles = []
for target_layer in target_layers:
self.handles.append(
target_layer.register_forward_hook(
self.save_activation))
# Backward compatibility with older pytorch versions:
if hasattr(target_layer, 'register_full_backward_hook'):
self.handles.append(
target_layer.register_full_backward_hook(
self.save_gradient))
else:
self.handles.append(
target_layer.register_backward_hook(
self.save_gradient))
def save_activation(self, module, input, output):
activation = output
if self.reshape_transform is not None:
activation = self.reshape_transform(activation)
self.activations.append(activation.cpu().detach())
def save_gradient(self, module, grad_input, grad_output):
# Gradients are computed in reverse order
grad = grad_output[0]
if self.reshape_transform is not None:
grad = self.reshape_transform(grad)
self.gradients = [grad.cpu().detach()] + self.gradients
def __call__(self, x):
self.gradients = []
self.activations = []
return self.model(x)
def release(self):
for handle in self.handles:
handle.remove()
class GradCAM:
def __init__(self, model, target_layers, reshape_transform=None):
self.model = model.eval()
self.target_layers = target_layers
self.reshape_transform = reshape_transform
self.activations_and_grads = ActivationsAndGradients(
self.model, target_layers, reshape_transform)
""" Get a vector of weights for every channel in the target layer.
Methods that return weights channels,
will typically need to only implement this function. """
@staticmethod
def get_cam_weights(grads):
return np.mean(grads, axis=(2, 3), keepdims=True)
@staticmethod
def get_loss(output, target_category):
loss = 0
for i in range(len(target_category)):
loss = loss + output[i, target_category[i]]
return loss
def get_cam_image(self, activations, grads):
weights = self.get_cam_weights(grads)
weighted_activations = weights * activations
cam = weighted_activations.sum(axis=1)
return cam
@staticmethod
def get_target_width_height(input_tensor):
width, height = input_tensor.size(-1), input_tensor.size(-2)
return width, height
def compute_cam_per_layer(self, input_tensor):
activations_list = [a.cpu().data.numpy()
for a in self.activations_and_grads.activations]
grads_list = [g.cpu().data.numpy()
for g in self.activations_and_grads.gradients]
target_size = self.get_target_width_height(input_tensor)
cam_per_target_layer = []
# Loop over the saliency image from every layer
for layer_activations, layer_grads in zip(activations_list, grads_list):
cam = self.get_cam_image(layer_activations, layer_grads)
cam[cam < 0] = 0 # works like mute the min-max scale in the function of scale_cam_image
scaled = self.scale_cam_image(cam, target_size)
cam_per_target_layer.append(scaled[:, None, :])
return cam_per_target_layer
def aggregate_multi_layers(self, cam_per_target_layer):
cam_per_target_layer = np.concatenate(cam_per_target_layer, axis=1)
cam_per_target_layer = np.maximum(cam_per_target_layer, 0)
result = np.mean(cam_per_target_layer, axis=1)
return self.scale_cam_image(result)
@staticmethod
def scale_cam_image(cam, target_size=None):
result = []
for img in cam:
img = img - np.min(img)
img = img / (1e-7 + np.max(img))
if target_size is not None:
img = cv2.resize(img, target_size)
result.append(img)
result = np.float32(result)
return result
def __call__(self, input_tensor, target_category=None):
# 正向传播得到网络输出logits(未经过softmax)
output = self.activations_and_grads(input_tensor)
if isinstance(target_category, int):
target_category = [target_category] * input_tensor.size(0)
if target_category is None:
target_category = np.argmax(output.cpu().data.numpy(), axis=-1)
print(f"category id: {target_category}")
else:
assert (len(target_category) == input_tensor.size(0))
self.model.zero_grad()
loss = self.get_loss(output, target_category)
loss.backward(retain_graph=True)
# In most of the saliency attribution papers, the saliency is
# computed with a single target layer.
# Commonly it is the last convolutional layer.
# Here we support passing a list with multiple target layers.
# It will compute the saliency image for every image,
# and then aggregate them (with a default mean aggregation).
# This gives you more flexibility in case you just want to
# use all conv layers for example, all Batchnorm layers,
# or something else.
cam_per_layer = self.compute_cam_per_layer(input_tensor)
return self.aggregate_multi_layers(cam_per_layer)
def __del__(self):
self.activations_and_grads.release()
def __enter__(self):
return self
def __exit__(self, exc_type, exc_value, exc_tb):
self.activations_and_grads.release()
if isinstance(exc_value, IndexError):
# Handle IndexError here...
print(
f"An exception occurred in CAM with block: {exc_type}. Message: {exc_value}")
return True
def show_cam_on_image(img: np.ndarray,
mask: np.ndarray,
use_rgb: bool = False,
colormap: int = cv2.COLORMAP_JET) -> np.ndarray:
""" This function overlays the cam mask on the image as an heatmap.
By default the heatmap is in BGR format.
:param img: The base image in RGB or BGR format.
:param mask: The cam mask.
:param use_rgb: Whether to use an RGB or BGR heatmap, this should be set to True if 'img' is in RGB format.
:param colormap: The OpenCV colormap to be used.
:returns: The default image with the cam overlay.
"""
heatmap = cv2.applyColorMap(np.uint8(255 * mask), colormap)
if use_rgb:
heatmap = cv2.cvtColor(heatmap, cv2.COLOR_BGR2RGB)
heatmap = np.float32(heatmap) / 255
if np.max(img) > 1:
raise Exception(
"The input image should np.float32 in the range [0, 1]")
cam = heatmap + img
cam = cam / np.max(cam)
return np.uint8(255 * cam)
def image_proprecess(img_path):
img = Image.open(img_path)
data_transforms = transforms.Compose([
transforms.Resize((384, 384), interpolation=3),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
data = data_transforms(img)
data = torch.unsqueeze(data,0)
img_resize = img.resize((384,384))
return img_resize,data
def Init_Setting():
model = models.mobilenet_v3_large(pretrained=True)
#model.load_state_dict(torch.load('model.pth'))
model = model.cuda().eval()
return model
if __name__ == "__main__":
imgs_path = "/dataset/gramcamtool/img/image.png"
model = Init_Setting()
target_layers = [model.features[-1]]
img, data = image_proprecess(imgs_path)
cam = GradCAM(model=model, target_layers=target_layers)
target_category = None
data = data.cuda()
grayscale_cam = cam(input_tensor=data, target_category=target_category)
grayscale_cam = grayscale_cam[0, :]
visualization = show_cam_on_image(np.array(img) / 255.,
grayscale_cam,
use_rgb=True)
plt.imshow(visualization)
plt.xticks()
plt.yticks()
plt.axis('off')
plt.savefig("/dataset/gramcamtool/img/gradcam_image.jpg")
数据
该.py路径的img文件夹中,放入image.png。
博主选择的图像来源:传送门。
运行即可
展示