【单目标优化算法】孔雀优化算法(Matlab代码实现)
欢迎来到本博客 ❤️ ❤️
博主优势: 博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳ 座右铭:行百里者,半于九十。
本文目录如下:
目录
1 概述
2 运行结果
3 参考文献
4 Matlab代码及详细文章
1 概述

受孔雀群智能行为的启发,POA的设计包括有效和高效的探索性和剥削性搜索算子,以在全球探索和局部开发之间提供适当的权衡,以避免局部最优,例如孔雀独特的旋转舞蹈操作,孔雀和孔雀幼崽在不同搜索阶段的自适应搜索行为,以及不同搜索阶段的相互作用 孔雀;
代表当前最优解的五只孔雀也会通过旋转跳动机制在附近的搜索空间中搜索,而不是静止不动。孔雀独特的旋转跳舞机制包含两种不同的旋转模式,即原位旋转和围绕食物源盘旋。首先采用当前最优解仍会进行就近搜索的机制,这在以前的算法中从未考虑过,有利于跳出局部最优;
孔雀幼崽和孔雀幼崽在整个搜索过程中都倾向于采用适应性搜索和接近机制,动态调整其不同阶段的行为,从而实现局部开发与全球探索之间的适当平衡。
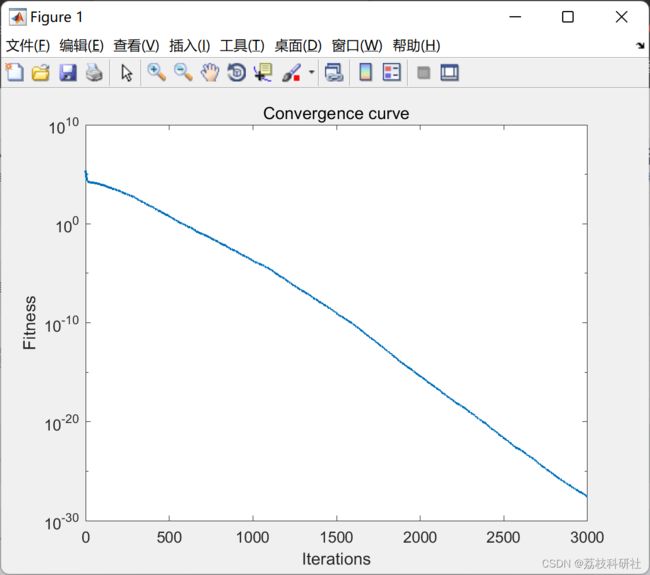
2 运行结果
部分代码:
% Peafowl Optimization Algorithm (POA)
function [BestSolution, ConvergenceCurve, Dim]=POA(NumAgents, MaxIterations, BenchmarkFunFlag)
% --------------------------Return Parameters--------------------------
% BestSolution: The best solution
% ConvergenceCurve: Convergence curve
% Dim: The dimensionality of prloblem
% --------------------------Input Parameters---------------------------
% NumAgents: The number of search individuals
% MaxIterations: The number of maximum iterations
% BenchmarkFunFlag: Objective function (1-23)
% ---------------------------------------------------------------------
ConvergenceCurve=zeros(1,MaxIterations);
NumPeacock=5; % the number of leader (Peacock)
NumPeahen=round((NumAgents-NumPeacock)*0.3); % the number of peahen
NumPeacockCub=NumAgents-NumPeacock-NumPeahen; % the number of peacock cub
[LowerBound, UpperBound, Dim]=BenchmarkFunctionRange(BenchmarkFunFlag);
LowerBound=LowerBound*ones(1,Dim);
UpperBound=UpperBound*ones(1,Dim);
SearchRadius0=(UpperBound-LowerBound)*0.2; % initial dance radius of peacock
% initialization
empty_peacock.Position=[];
empty_peacock.Fitness=[];
PeacockPopulation0=repmat(empty_peacock,[NumAgents,1]);
Peahen=repmat(empty_peacock,[NumPeahen,1]);
PeacockCub=repmat(empty_peacock,[NumPeacockCub,1]);
for k=1:NumAgents
PeacockPopulation0(k).Position=LowerBound+(UpperBound-LowerBound).*rand(1,Dim);
PeacockPopulation0(k).Fitness=BenchmarkFunction(PeacockPopulation0(k).Position, BenchmarkFunFlag, Dim);
end
PeacockPopulation=PeacockPopulation0;
[~,index]=sort([PeacockPopulation.Fitness]);
PeacockPopulation=PeacockPopulation(index);
ConvergenceCurve(1)=PeacockPopulation(1).Fitness;
% main loop
for it=2:MaxIterations
SearchRadius=SearchRadius0-(SearchRadius0-0)*(it/MaxIterations)^0.01;
alpha=0.9-(0.9-0.4)*(it/MaxIterations)^2;
delta=0.1+(1-0.1)*(it/MaxIterations)^0.5;
step=0.1+(1-0.1)*(it/MaxIterations);
Peacock=PeacockPopulation(1:NumPeacock);
if rand<1
X_random=2*rand(1,Dim)-1;
Peacock(1).Position=Peacock(1).Position+1*SearchRadius.*X_random/(eps+norm(X_random));
end
if rand<0.9
X_random=2*rand(1,Dim)-1;
Peacock(2).Position=Peacock(2).Position+1.5*SearchRadius.*X_random/(eps+norm(X_random));
end
if rand<0.8
X_random=2*rand(1,Dim)-1;
Peacock(3).Position=Peacock(3).Position+2*SearchRadius.*X_random/(eps+norm(X_random));
end
if rand<0.6
X_random=2*rand(1,Dim)-1;
Peacock(4).Position=Peacock(4).Position+3*SearchRadius.*X_random/(eps+norm(X_random));
end
if rand<0.3
X_random=2*rand(1,Dim)-1;
Peacock(5).Position=Peacock(5).Position+5*SearchRadius.*X_random/(eps+norm(X_random));
end
for k=1:NumPeacock
flag4ub=Peacock(k).Position>UpperBound;
flag4lb=Peacock(k).Position Peacock(k).Position=~(flag4ub+flag4lb).*Peacock(k).Position+flag4ub.*UpperBound+flag4lb.*LowerBound; Peacock(k).Fitness=BenchmarkFunction(Peacock(k).Position, BenchmarkFunFlag, Dim); if Peacock(k).Fitness < PeacockPopulation(k).Fitness PeacockPopulation(k)=Peacock(k); end end for k=1:NumPeahen r1=rand(); if r1 <= 1 && r1 >=0.6 Peahen(k).Position=PeacockPopulation(NumPeacock+k).Position+3*step*(PeacockPopulation(1).Position-PeacockPopulation(NumPeacock+k).Position); end if r1 < 0.6 && r1 >=0.4 Peahen(k).Position=PeacockPopulation(NumPeacock+k).Position+3*step*(PeacockPopulation(2).Position-PeacockPopulation(NumPeacock+k).Position); end if r1 < 0.4 && r1 >=0.2 Peahen(k).Position=PeacockPopulation(NumPeacock+k).Position+3*step*(PeacockPopulation(3).Position-PeacockPopulation(NumPeacock+k).Position); end if r1 < 0.2 && r1 >=0.1 Peahen(k).Position=PeacockPopulation(NumPeacock+k).Position+3*step*(PeacockPopulation(4).Position-PeacockPopulation(NumPeacock+k).Position); end if r1 < 0.1 && r1 >=0 Peahen(k).Position=PeacockPopulation(NumPeacock+k).Position+3*step*(PeacockPopulation(5).Position-PeacockPopulation(NumPeacock+k).Position); end flag4ub=Peahen(k).Position>UpperBound; flag4lb=Peahen(k).Position Peahen(k).Position=~(flag4ub+flag4lb).*Peahen(k).Position+flag4ub.*UpperBound+flag4lb.*LowerBound; Peahen(k).Fitness=BenchmarkFunction(Peahen(k).Position, BenchmarkFunFlag, Dim); if Peahen(k).Fitness < PeacockPopulation(NumPeacock+k).Fitness PeacockPopulation(NumPeacock+k)=Peahen(k); end end for k=1:NumPeacockCub PeacockCub(k)=PeacockPopulation(NumPeacock+NumPeahen+k); r2=rand; if r2>0.8 && r2<=1 SelectedPeacock=PeacockPopulation(1); elseif r2>0.6 && r2<=0.8 SelectedPeacock=PeacockPopulation(2); elseif r2>0.4 && r2<=0.6 SelectedPeacock=PeacockPopulation(3); elseif r2>0.2 && r2<=0.4 SelectedPeacock=PeacockPopulation(4); else SelectedPeacock=PeacockPopulation(5); end PeacockCub(k).Position=PeacockCub(k).Position+alpha*Levy(Dim).*( PeacockPopulation(1).Position - PeacockCub(k).Position )+delta*( SelectedPeacock.Position - PeacockCub(k).Position ); flag4ub=PeacockCub(k).Position>UpperBound; flag4lb=PeacockCub(k).Position PeacockCub(k).Position=~(flag4ub+flag4lb).*PeacockCub(k,:).Position+flag4ub.*UpperBound+flag4lb.*LowerBound; PeacockCub(k).Fitness=BenchmarkFunction(PeacockCub(k).Position, BenchmarkFunFlag, Dim); if PeacockCub(k).Fitness < PeacockPopulation(NumPeacock+NumPeahen+k).Fitness PeacockPopulation(NumPeacock+NumPeahen+k)=PeacockCub(k,:); end end Peacock=PeacockPopulation(1:NumPeacock); Xrandom=2*rand(1,Dim)-1; Direction1=Peacock(1,:).Position-Peacock(2,:).Position; Direction2=Xrandom-(Xrandom*Direction1')/(Direction1*Direction1'+eps)*Direction1; Direction2=Direction2/norm(Direction2+eps)*norm(Direction1); Peacock(2,:).Position=Peacock(2,:).Position+step*Direction1+rand*Direction2; Xrandom=2*rand(1,Dim)-1; Direction1=Peacock(1,:).Position-Peacock(3,:).Position; Direction2=Xrandom-(Xrandom*Direction1')/(Direction1*Direction1'+eps)*Direction1; Direction2=Direction2/norm(Direction2+eps)*norm(Direction1); Peacock(3,:).Position=Peacock(3,:).Position+step*Direction1+rand*Direction2; Xrandom=2*rand(1,Dim)-1; Direction1=Peacock(1,:).Position-Peacock(4,:).Position; Direction2=Xrandom-(Xrandom*Direction1')/(Direction1*Direction1'+eps)*Direction1; Direction2=Direction2/norm(Direction2+eps)*norm(Direction1); Peacock(4,:).Position=Peacock(4,:).Position+step*Direction1+rand*Direction2; Xrandom=2*rand(1,Dim)-1; Direction1=Peacock(1,:).Position-Peacock(5,:).Position; Direction2=Xrandom-(Xrandom*Direction1')/(Direction1*Direction1'+eps)*Direction1; Direction2=Direction2/norm(Direction2+eps)*norm(Direction1); Peacock(5,:).Position=Peacock(5,:).Position+step*Direction1+rand*Direction2; for k=1:NumPeacock flag4ub=Peacock(k).Position>UpperBound; flag4lb=Peacock(k).Position Peacock(k).Position=~(flag4ub+flag4lb).*Peacock(k).Position+flag4ub.*UpperBound+flag4lb.*LowerBound; Peacock(k).Fitness=BenchmarkFunction(Peacock(k).Position, BenchmarkFunFlag, Dim); if Peacock(k).Fitness < PeacockPopulation(k).Fitness PeacockPopulation(k)=Peacock(k); end end [~,index]=sort([PeacockPopulation.Fitness]); PeacockPopulation=PeacockPopulation(index); ConvergenceCurve(1,it)=PeacockPopulation(1).Fitness; end BestSolution=PeacockPopulation(1); end [1] Jingbo Wang, Bo Yang, Yijun Chen, Kaidi Zeng, Hao Zhang, Hongchun Shu, Yingtong Chen, Novel phasianidae inspired peafowl (Pavo muticus/cristatus) optimization algorithm: Design, evaluation, and SOFC models parameter estimation, Sustainable Energy Technologies and Assessments https://doi.org/10.1016/j.seta.2021.1018253 参考文献
部分理论来源于网络,如有侵权请联系删除。
4 Matlab代码及详细文章