(33)(33.3) 连接实例
文章目录
前言
33.3.1 嵌入在集体PPM/总信号通道中的RSSI
33.3.2 模拟电压型RSSI被输送到一个专用引脚
33.3.3 PWM类型的RSSI输送到一个专用引脚

前言
以下是典型的 RC 接收机 RSSI 连接方案示例:
33.3.1 嵌入在集体PPM/总信号通道中的RSSI
通常的做法是在一根信号线上使用 cPPM 或 sBus 类型的总和信号将所有遥控通道从遥控接收机馈送到自动驾驶仪。大多数 UHF 类型的遥控系统,如 EZUHF、OpenLRS、Crossfire 或 DragonLink,都支持将 RSSI 嵌入到该集合/总和信号流中的专用通道。根据 ArduPilot 的默认通道 1-4 被用作主控制(横滚、俯仰、油门、偏航)的输入,4 以上的任何通道号都可用于嵌入 RSSI。通常,这些系统使用图形用户界面将 RSSI 分配到遥控接收机的专用通道插槽,或默认设置为标准通道。请参考各自系统的用户手册。
如果已有遥控接收机连接到自动驾驶仪,则使用嵌入式 RSSI 无需额外布线:

下面的示例显示了如何在 DragonLink RC 接收机上分配通道5嵌入 RSSI:
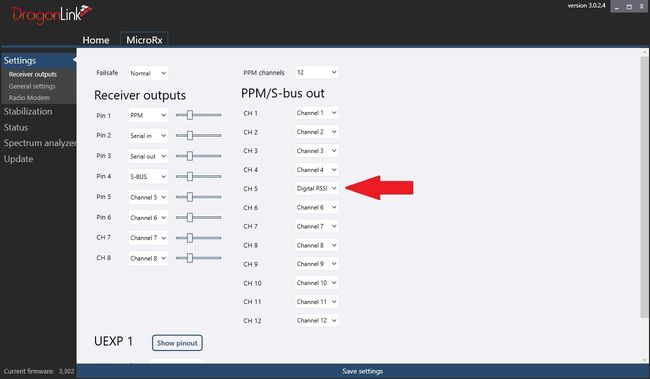
RSSI 值将通过信号引脚1上的 PPM 数据流和引脚4上的 sBus 数据流输出。两者均可馈送至自动驾驶仪的 RCInput 引脚。
现在设置相应的 RSSI 参数:
1. RSSI_TYPE = 2(如果之前设置为默认值 0,则需要重新加载参数)。
2. RSSI_CHANNEL = 在遥控接收机上嵌入 RSSI 的通道(上例中为第 5 通道)。
3. RSSI_CHAN_HIGH = 接收信号最强时的信道值。
4. RSSI_CHAN_LOW = 接收信号最弱时的信道值。
在 GCS 中显示 rxssi 的同时显示相应 RC 通道的输入值,有助于调整 RSSI 值范围,使其与 0-100% 的 RSSI 范围相匹配:

在最强接收状态下,Ch5 显示 PWM 值为 1904us。关闭发射机后,该值将降至 1093us。分别设置 RSSI_CHAN_HIGH 和 RSSI_CHAN_LOW 可以将使用的 PWM 范围扩展到 0 - 100 %,并获得最佳分辨率。
!Note
某些 sBus 协议差异可能导致接收机故障保护期间通道值不更新。在这种情况下,你将看到在故障保护期间显示的最后有效 RSSI 值。由于在飞行条件下接收信号强度通常会逐渐降低,这可能不会产生任何负面影响。然而,在设置和测试过程中,当你的遥控发射机实际关闭时,RSSI 被冻结在一个相当高的值上,这可能会引起混淆。
33.3.2 模拟电压型RSSI被输送到一个专用引脚
如果你的遥控接收机输出 RSSI 类型的模拟电压范围,你可以将其输入到自动驾驶仪的模拟 RSSI 输入引脚。典型的电压范围为 0 - 3.3V 或 0 - 5V。详情请参见遥控系统手册或使用万用表检查。
!Note
请注意,虽然大多数自动驾驶仪的输入引脚理论上可承受 5V 电压,但大多数 ADC 只能测量 3.3 - 3.6 V 电压,除非配备分压器以降低较高的输入电压。请检查你的遥控接收机的 RSSI 电压以及自动驾驶仪的规格,以确保兼容性。
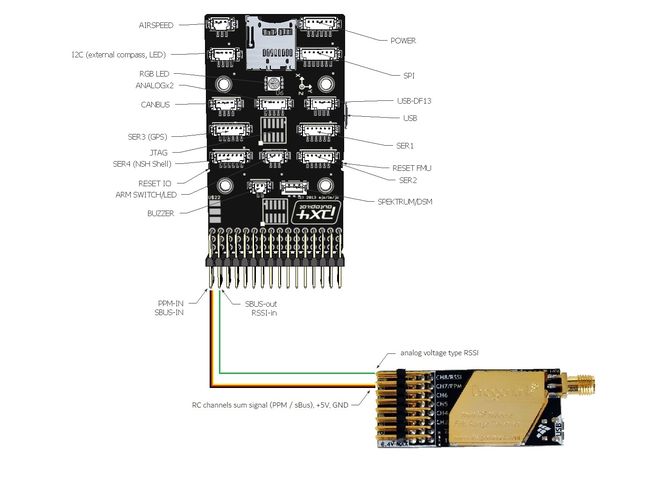
如果现有的遥控接收机与自动驾驶仪的连接包括电源电压和接地,则只需增加一条信号线。下面的示例显示了如何将接收器的模拟电压型 RSSI 连接到 pixhawk 自动驾驶仪的 sBus 输出引脚:
现在设置相应的 RSSI 参数:
1. RSSI_TYPE = 1(如果之前设置为默认值 0,则需要重新加载参数)。
2. RSSI_ANA_PIN = 103(PixHawk SBUS 输出/RSSI 输入引脚)。
3. RSSI_PIN_HIGH 当信号最强时,RSSI_ANA_PIN 上接收到的电压,通常为 3.3V。
4. RSSI_PIN_LOW 当信号最弱时,RSSI_ANA_PIN 上接收到的电压,通常为 0V。
!Note
RSSI 类型选项取决于你的 RC 系统规格。有些系统需要额外的变通方法或非标准专有协议的额外硬件转换。
33.3.3 PWM类型的RSSI输送到一个专用引脚
如果你的遥控接收机在专用引脚或焊盘上输出 PWM 类型的 RSSI,你可以将其馈送至自动驾驶仪的 GPIO 引脚之一。请参阅 GPIOs 将 PWM 输出引脚设置为 GPIO。在 pixahwk 类型的硬件上,这指的是 AUX 引脚,因为它们连接到电路板的 MCU,绕过了 IOMCU 协处理器。
| HW Pin (AUX) number |
alternative GPIO number |
| 1 |
50 |
| 2 |
51 |
| 3 |
52 |
| 4 |
53 |
| 5 |
54 |
| 6 |
55 |
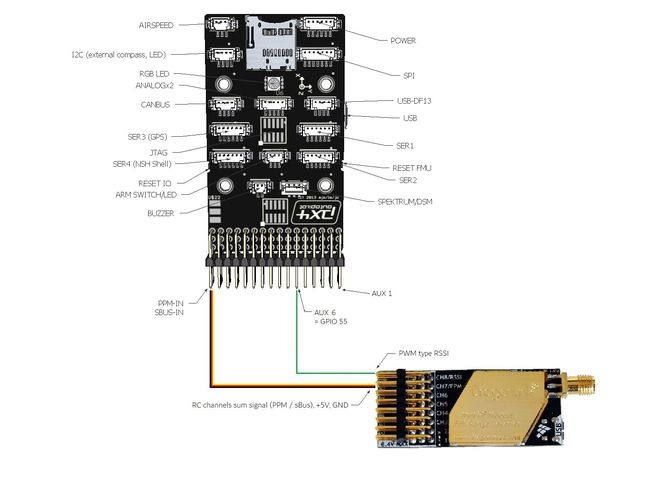
在上面的例子中,将 BRD_PWM_COUNT 设置为 4,将引脚1-4 设置为 PWM 输出,并释放引脚5和 6 作为 GPIO 54 和 55 使用。
如果现有的遥控接收机与自动驾驶仪的连接包括电源电压和接地,则只需增加一根信号线。下面的示例显示了如何将接收器的 PWM 型 RSSI 输出连接到 pixhawk 自动驾驶仪的 AUX 6 针脚组作为 GPIO 55 使用:
现在设置相应的 RSSI 参数:
1. RSSI_TYPE = 4(如果之前设置为默认值 0,则需要重新加载参数)。
2. RSSI_ANA_PIN = 使用的 GPIO 引脚编号(上例中为 55)。
3. RSSI_CHAN_HIGH = 接收信号最强时的 PWM 值。
4. RSSI_CHAN_LOW = 接收信号最弱时的 PWM 值。