c++ http高并发服务器笔记
文章预览:
- 第二章 Linux多进程开发
-
- 2.9 waitpid函数
- 2.11 匿名管道
- 2.12
- 2.13
- 2.14管道的读写特点和管道设置为非阻塞
- 2.15 有名管道的介绍和使用
- 2.20 kill、raise、abort函数
- 2.21 alarm函数
- 2.22 setitimer函数
- 2.23 signal信号捕捉函数
- 2.24 信号集及相关函数
-
- 1、sigemptyset
- 2、sigfillset
- 3、sigaddset、sigdelset
- 4、sigismember
- 2.25 sigprocmask
- 2.26 sigaction
- 2.27 SIGCHLD信号
- 2.28 共享内存
-
- 1、shmgt函数
- 2、shmat函数
- 3、shmdt函数
- 4、shmctl函数
- 5、ftok函数
- 2.31 守护进程
- 第三章 Linux多线程开发
-
- 3.1 线程概述
- 3.2 创建线程
-
- pthread_create函数
- 3.3 结束线程
-
- pthread_exit函数
- pthread_t
- pthread_equal
- 3.4 连接已结束的线程
-
- pthread_join
- 3.5 线程的分离
-
- pthread_detach
- 3.6 线程取消
-
- pthread_cancel
- 3.7线程属性
-
- pthread_attr_init\pthread_attr_destroy\pthread_attr_getdetachstate\pthread_attr_setdetachstate
- 3.9 互斥锁
-
- pthread_mutex_init
- pthread_mutex_destroy
- pthread_mutex_lock
- pthread_mutex_trylock
- pthread_mutex_unlock
- 3.13 条件变量
- 3.14 信号量
- 第四章 linux网络编程
-
- 4.12 IP地址转换
- 4.17 TCP三次握手
- 4.19 TCP四次挥手
- 4.20 多进程实现并发服务器1
- 4.21 多进程实现并发服务器2
- 4.22 多线程实现并发服务器
- 4.25 IO多路复用
- 4.27 select
- 4.28 poll
- 4.30 epoll代码编写
- 4.31 epoll的两种工作模式
- 第五章 实战
-
- 5.1 阻塞和非阻塞、同步和异步
- 5.7 解析http请求报文
第二章 Linux多进程开发
2.9 waitpid函数

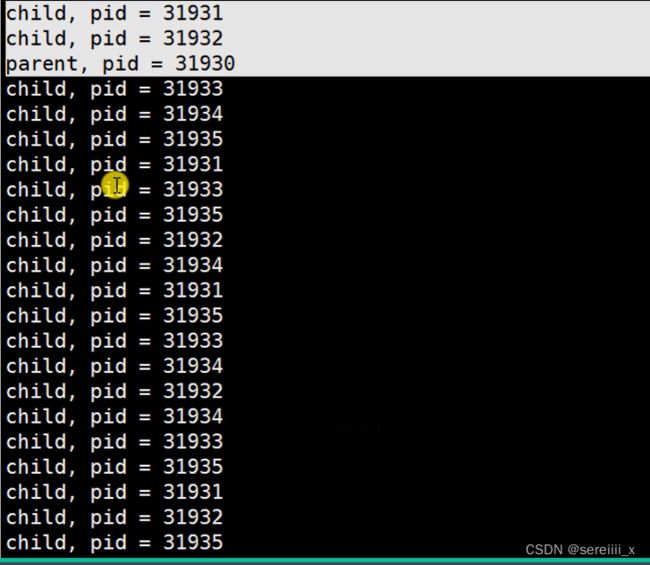
由于子进程一直没有结束,所以 这里是非阻塞的,父进程会一直输出语句
非阻塞会一直往下面运行程序,不会一直停在waitpid

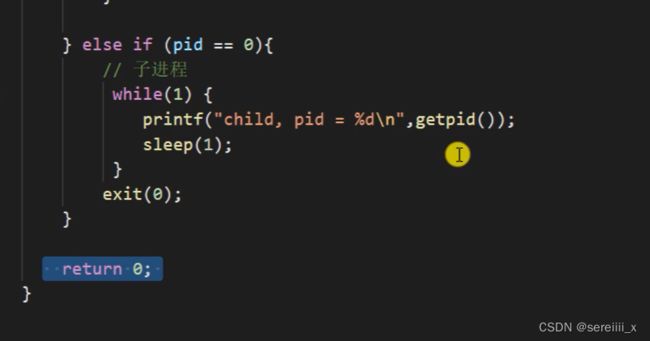
默认阻塞就把opition那里改成0,默认阻塞的情况父进程只会输出一条语句,子进程会一直输出
阻塞情况下会一直运行waitpid
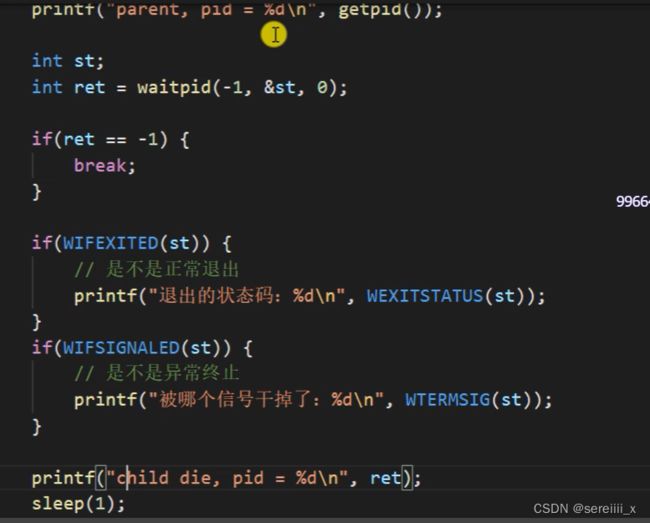
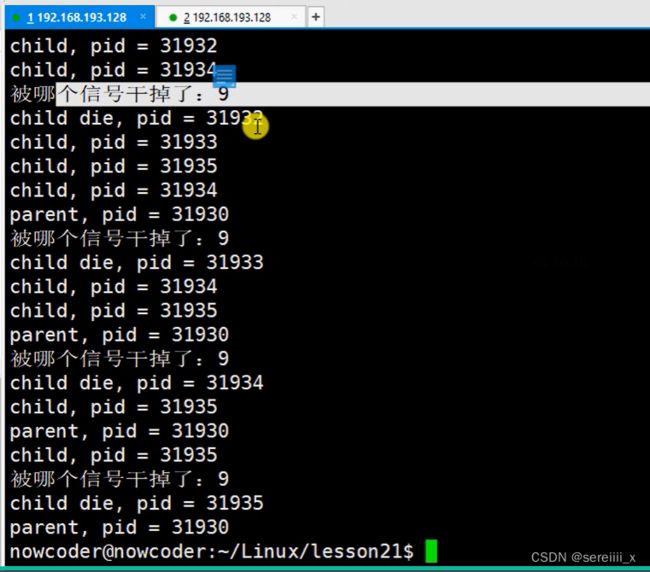
把子进程kill掉后

2.11 匿名管道
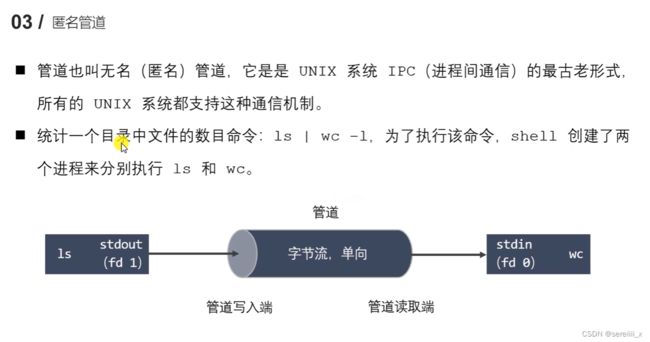
【Linux】linux下wc -l 命令
2.12
父进程和子进程可以互相给对方发送数据和读取数据,但是顺序一定得是相反的,因为read是阻塞的

2.13
先创建管道再创建子进程才可以实现通信
2.14管道的读写特点和管道设置为非阻塞
非阻塞条件下就会一直read,就算没有数据父进程也会一直read,read不会阻塞在那里等待数据传过来

2.15 有名管道的介绍和使用
1.echo
linux命令echo的实现,Linux echo命令的使用及三种实现方式
2、有名管道只开启写端是不会开始写数据的,因为此时读端还没有开启,只有读端开启了管道才开始通信,才会开始写数据读数据
2.20 kill、raise、abort函数
1、kill
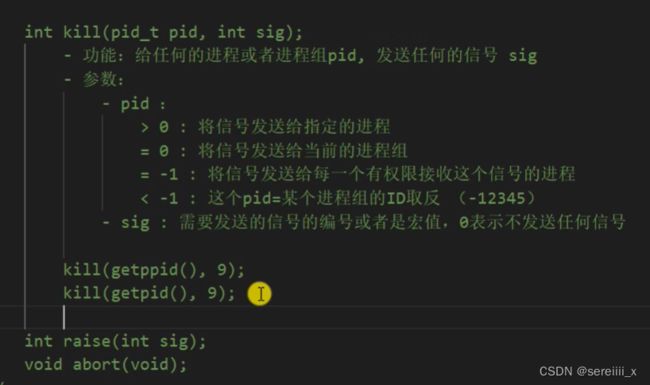
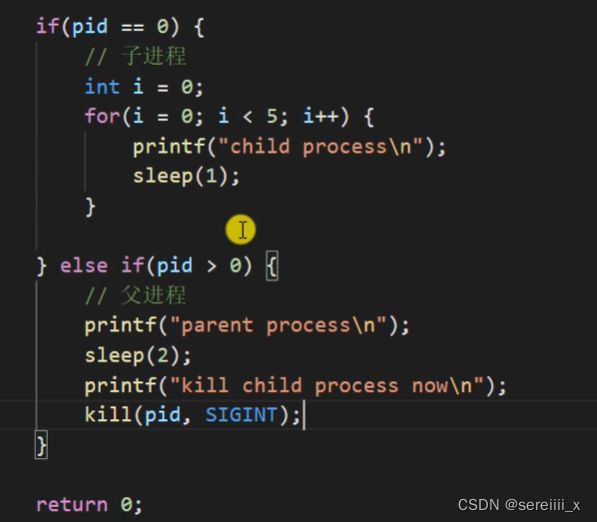
父进程杀死子进程的例子:
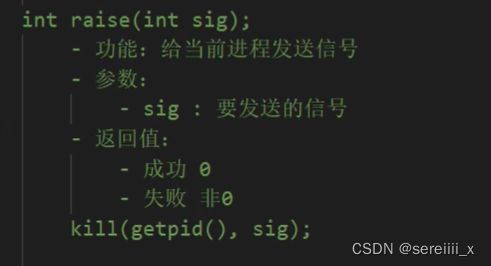
2、raise
3、abort

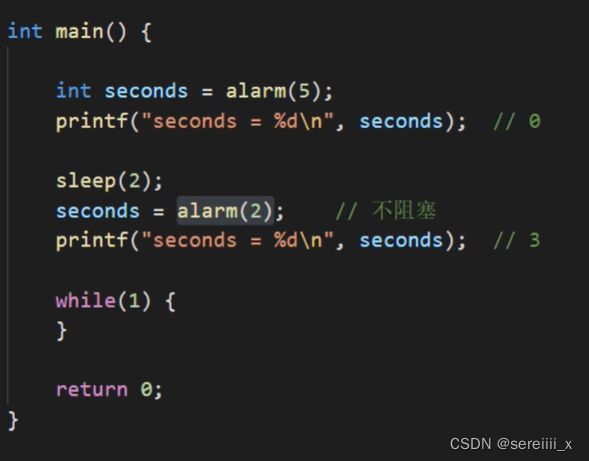
2.21 alarm函数
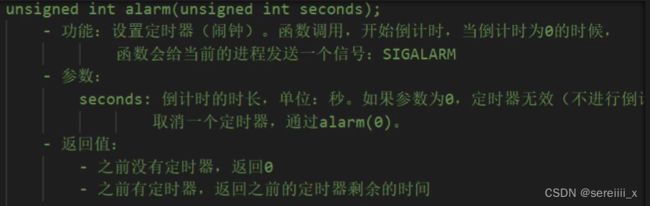
被遮住的地方:
不进行倒计时,不发送信号
比如第一次调用alarm(10) ,SIGALARM返回0,过了一秒后调用alarm(5),因为之前有定时器倒计时10秒,所以返回9
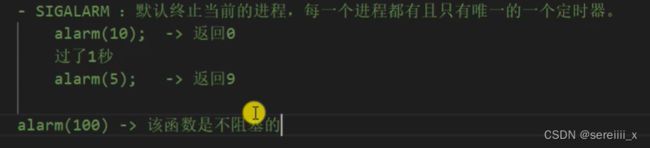
下面这个例子里面alarm(2)相当于重新设置倒计时为2s,所以过了2s后程序会结束
![]()
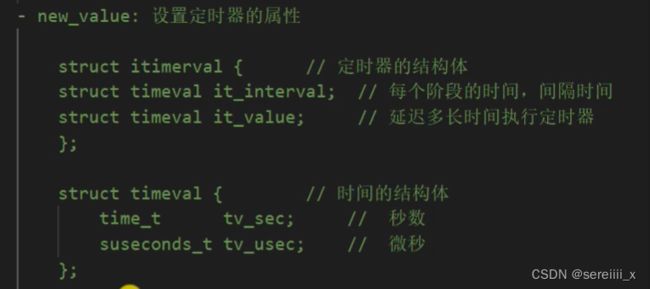
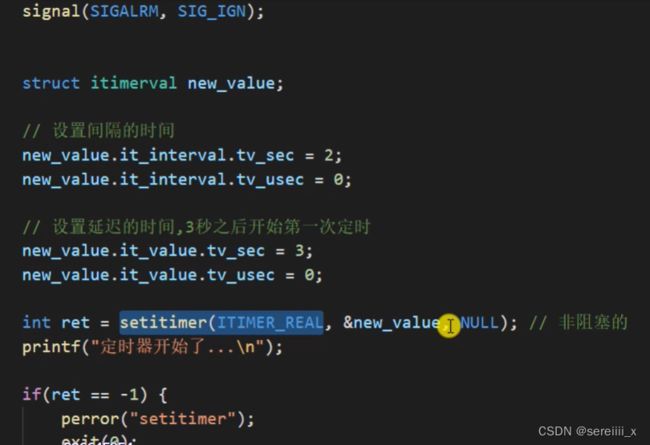
2.22 setitimer函数
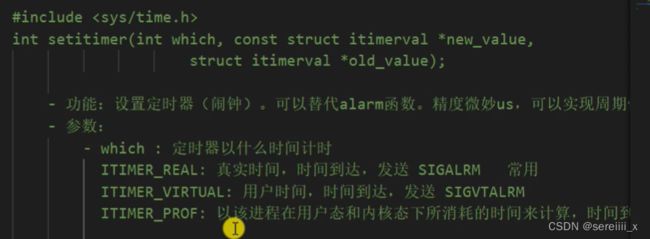
![]()

eg:定时器开始了一运行就打印出来了(因为是非阻塞的),3s之后就结束了程序
这里的定时并没有体现,因为还没用到捕捉

2.23 signal信号捕捉函数

![]()

eg:信号捕捉设置设置定时器之前,还是上一节的例子,这里设置的是忽略信号,所以这个进程一直都不会结束
eg:设置回调函数
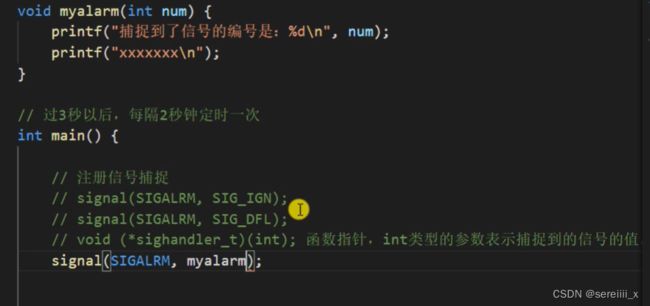
输出:
打印”定时器开始了…”之后再过三秒第一次打印捕捉到的信号,后面每过2s打印一次
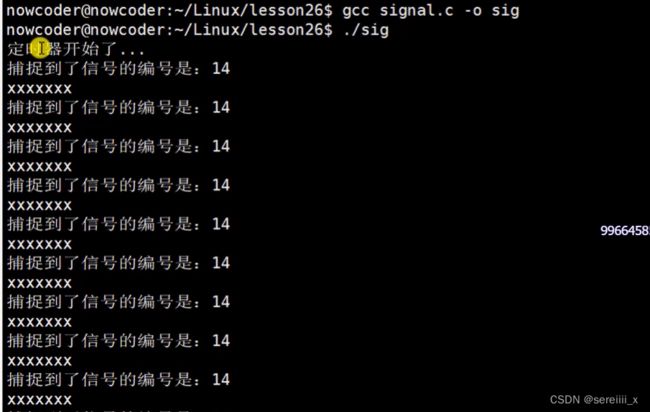

因为SIGKILL是杀死进程,如果被捕捉了进程在一直孕行的过程中都不能杀死进程,如果写了一个这样的病毒危害性是很大的
2.24 信号集及相关函数
![]()
1、sigemptyset

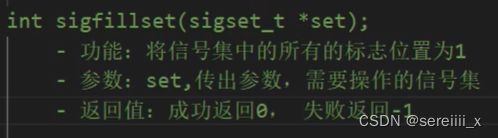
2、sigfillset
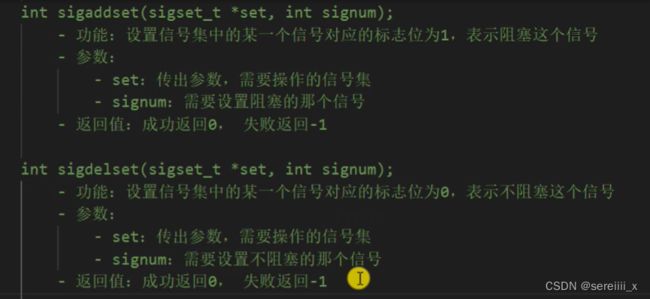
3、sigaddset、sigdelset
4、sigismember

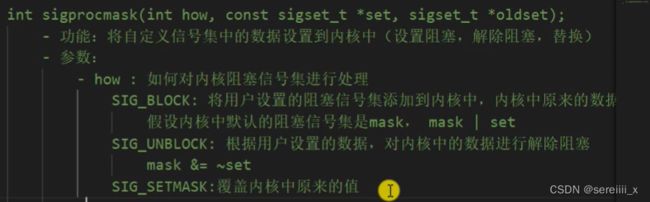
2.25 sigprocmask


在控制台输出的时候可以设置前台控制还是后台控制?可以通过&符号来进行控制?
为什么这里设置非阻塞之后就可以结束进程了?


因为只要有信号是阻塞的,循环里面就会一直打印阻塞信号,但是设置了UNBLOCK之后应该是将所有信号都设置为非阻塞的,所以会结束

2.26 sigaction
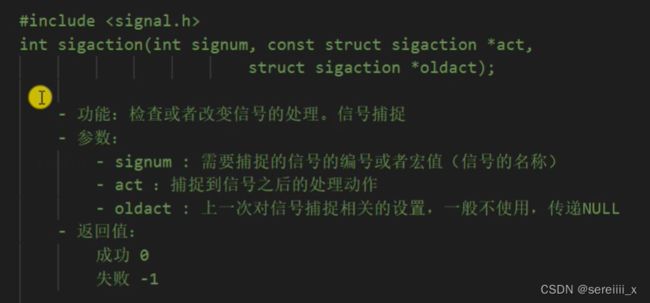
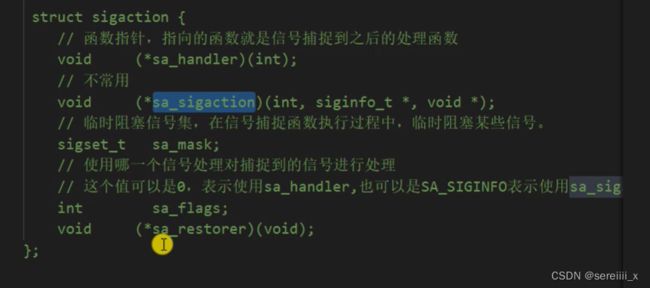

说明:要避免使用signal,因为不同的机器可能版本不一样
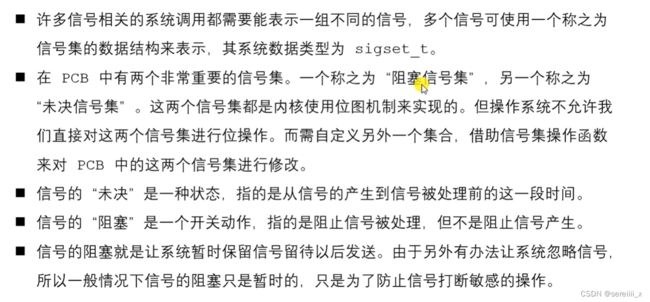
未决信号集和阻塞信号集不能排队,它的标志位只能是0或者1,不能说来了多少个信号就记录多少个数字,所以不能排队
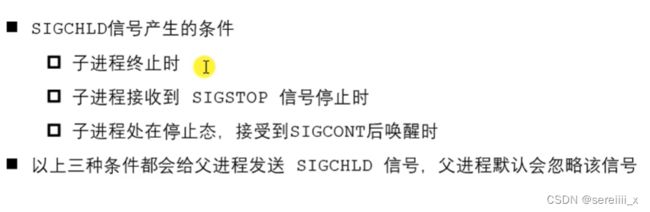
2.27 SIGCHLD信号
该信号可用于解决僵尸进程,可以捕捉SIGCHLD信号,捕捉到后父进程再去调用wait或者waitpid函数
比如要有20个子进程,要回收3个子进程,都是17号,在第一个子进程结束发送SIGCHLD的时候,17号被记为1,其他两个也结束了,但是此时未决信号集只能记录一个,它还是1,所以这些信号被忽略了

处理方法:可以在回调函数里面用一个循环不停去回收,但是这样会死循环,父进程就不能做其他事了
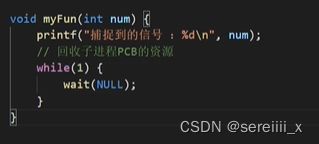
继续改进:
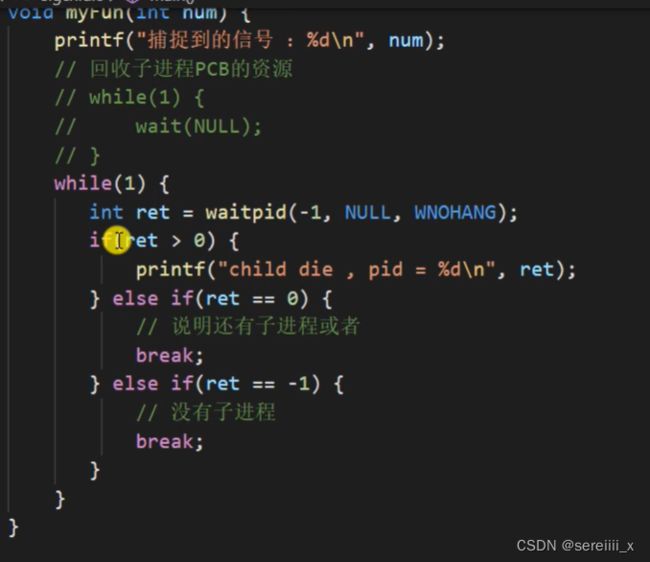
waitpid的-1代表回收所有子进程,
当调用waitpid函数时,它会去搜索是否存在已经终止的子进程,找到了那就处理。这里while循环,如果存在终止子进程,waitpid就一定会去处理。因为ret等于0代表此时并没有终止的子进程,而ret等于-1代表没有子进程。总结,只要存在终止子进程,while就会循环多一次,有多少个就循环多少次。
但是也会存在一个问题,多运行几次发生段存储错误
因为在用sigaction还没注册好时子进程就已经结束了,导致捕捉不到SIGCHLD信号
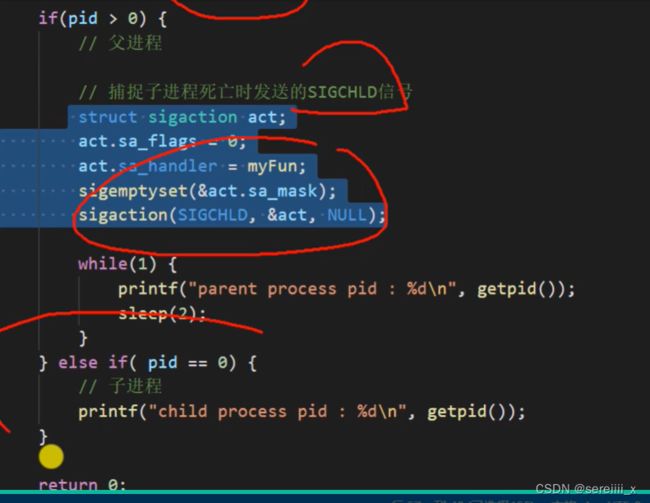
解决方法:提前设置好阻塞信号集


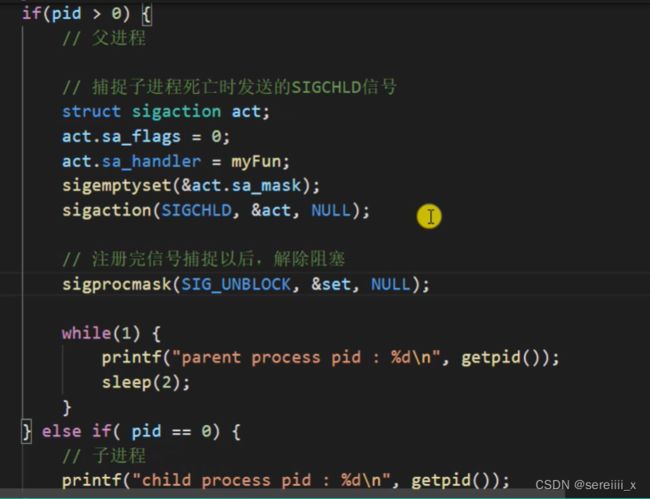
所以这样设置阻塞后能够保证信号捕捉注册好以后再进行信号捕捉,即使这时候所有的子进程都已经结束了也能进入回调函数,回收子进程

未决信号集对应的位置被设置1,说明发生了该信号但是还没有被处理,如果此时没有捕捉到的话,那么父进程就会忽略此条SIGCHLD信号,但是由于前面将阻塞信号集相应位置设置为了1,所以该信号还不能被处理,只有解除阻塞之后该信号才可以被处理,此时捕捉函数就可以捕捉到SIGCHLD信号
2.28 共享内存
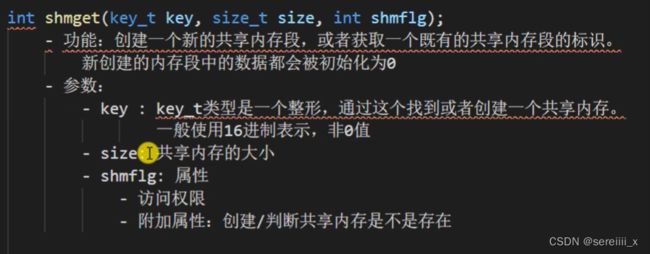
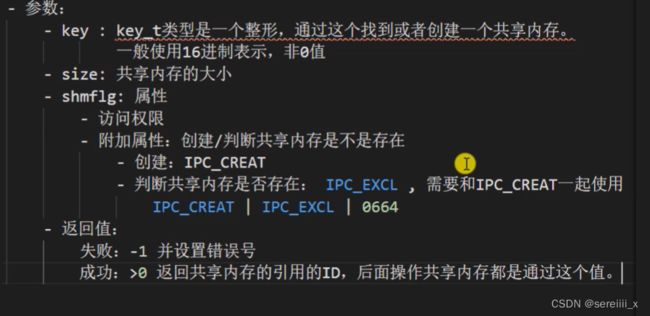
1、shmgt函数
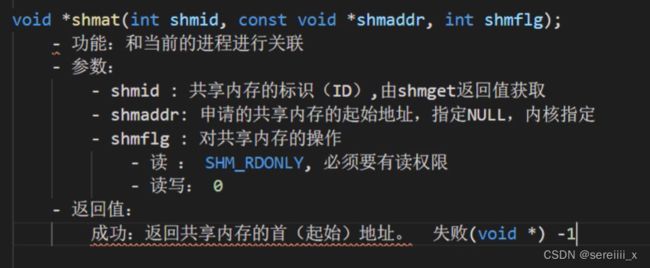
2、shmat函数
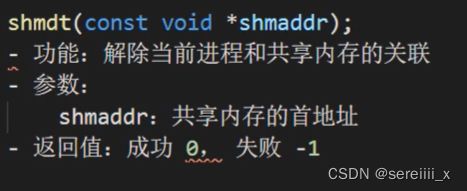
3、shmdt函数
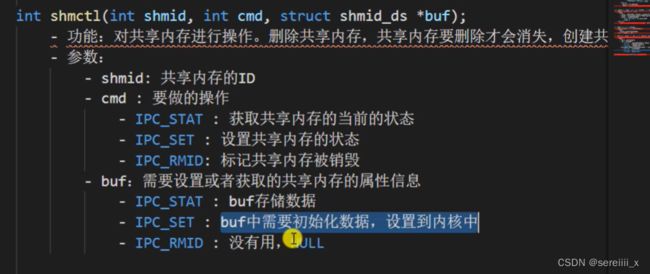
4、shmctl函数

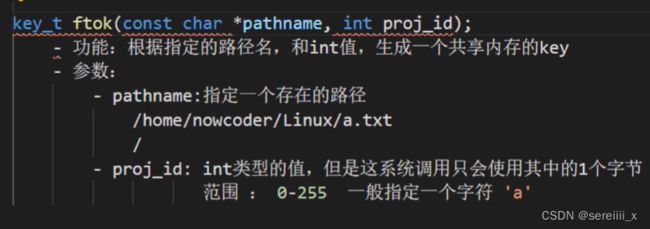
5、ftok函数
这里的ipcrm第一个用法只是标记删除,实际的连接数还是没变,相当于只是把key给删除?连接数只能程序执行后取消关联才会减少
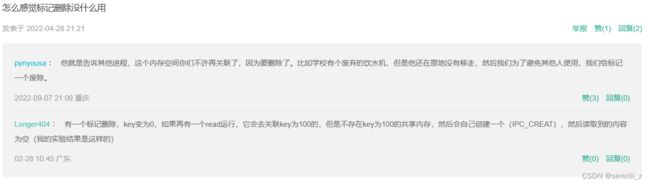

——————————————————
最后一句话是也不能进行关联
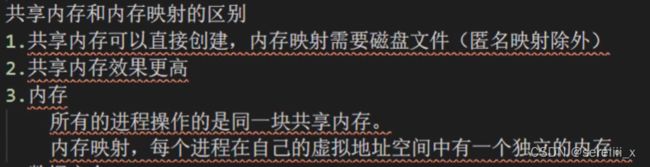
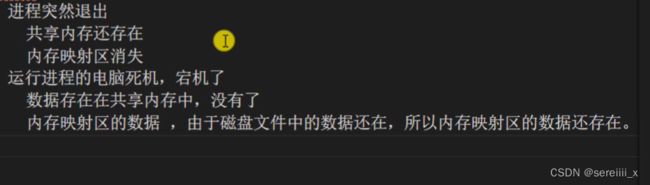
4.数据安全



2.31 守护进程
调用setsid开启新会话是没有控制终端的
因此内核就不能通过发送一些信号去杀死进程
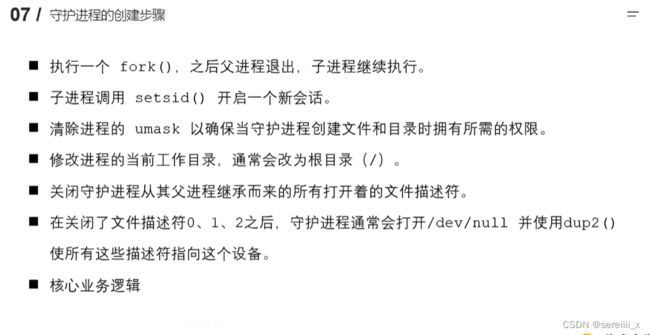
对于第一点在子进程中进行操作的原因:
首先组id和父进程是一样的,如果利用父进程新创建一个会话,那么这个会话的组id也是100,相当于两个会话id一样,有冲突
关闭文件描述符:为了防止守护进程往终端里面读写数据
第六点重定向后会丢弃设备
守护进程是孤儿进程
kill是发送信号的shell命令,可以给指定进程发送指定信号。不能被控制终端的Ctrl+C或者Ctrl+\结束,因为它没有自己的控制终端,是新的会话没有绑定控制终端,但它还是一个进程,可以接收信号。
代码:
在回调函数里面如果将数据输出到终端里面就不会显示出来,因为这个守护进程的标准输出已经重定向了,但是将数据输出到文件中还是可以输出的
/*
写一个守护进程,每隔2s获取一下系统时间,将这个时间写入到磁盘文件中。
*/
#include 第三章 Linux多线程开发
3.1 线程概述
如果创建线程的话
相当于栈空间分成了三份,每一份放一个进程
text空间也是这样
其他的区域都是共享的,所以可以节约很多时间,不需要像创建进程那样使用写时复制技术

3.2 创建线程
2进行应该是2进程

pthread_create函数


3.3 结束线程
pthread_exit函数

pthread_t

后面的printf不会再执行了
pthread_equal

3.4 连接已结束的线程
pthread_join
因为是阻塞的,所以函数会一直等到要回收的线程结束后才会往下执行
pthread_exit函数中可以返回一个指针,所以要对这个返回的指针进行操作的话这里的参数列表应该用二级指针
/*
#include
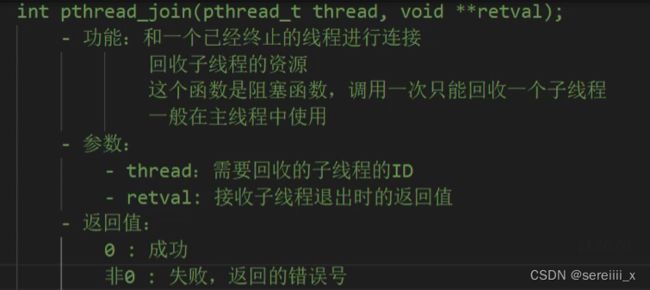
int pthread_join(pthread_t thread, void **retval);
- 功能:和一个已经终止的线程进行连接
回收子线程的资源
这个函数是阻塞函数,调用一次只能回收一个子线程
一般在主线程中使用
- 参数:
- thread:需要回收的子线程的ID
- retval: 接收子线程退出时的返回值
- 返回值:
0 : 成功
非0 : 失败,返回的错误号
*/
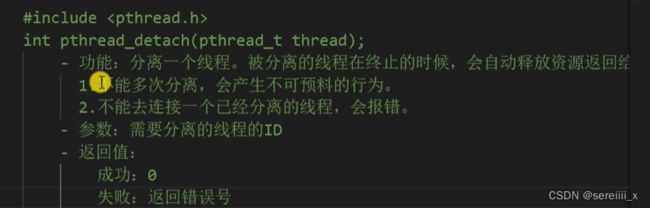
#include 3.5 线程的分离
pthread_detach
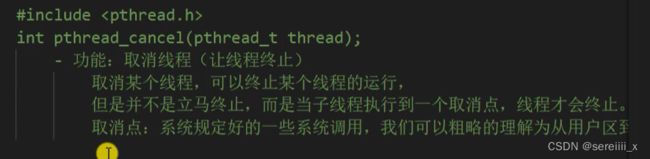
3.6 线程取消
pthread_cancel

3.7线程属性
pthread_attr_init\pthread_attr_destroy\pthread_attr_getdetachstate\pthread_attr_setdetachstate
/*
int pthread_attr_init(pthread_attr_t *attr);
- 初始化线程属性变量
int pthread_attr_destroy(pthread_attr_t *attr);
- 释放线程属性的资源
int pthread_attr_getdetachstate(const pthread_attr_t *attr, int *detachstate);
- 获取线程分离的状态属性
int pthread_attr_setdetachstate(pthread_attr_t *attr, int detachstate);
- 设置线程分离的状态属性
*/
3.9 互斥锁
pthread_mutex_init
限制下面的举例表示不可以用另一个指针来操作这个互斥锁
pthread_mutex_destroy
pthread_mutex_lock
pthread_mutex_trylock
pthread_mutex_unlock
/*
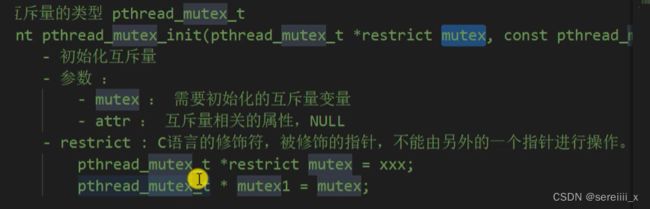
互斥量的类型 pthread_mutex_t
int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr);
- 初始化互斥量
- 参数 :
- mutex : 需要初始化的互斥量变量
- attr : 互斥量相关的属性,NULL
- restrict : C语言的修饰符,被修饰的指针,不能由另外的一个指针进行操作。
pthread_mutex_t *restrict mutex = xxx;
pthread_mutex_t * mutex1 = mutex;
int pthread_mutex_destroy(pthread_mutex_t *mutex);
- 释放互斥量的资源
int pthread_mutex_lock(pthread_mutex_t *mutex);
- 加锁,阻塞的,如果有一个线程加锁了,那么其他的线程只能阻塞等待
int pthread_mutex_trylock(pthread_mutex_t *mutex);
- 尝试加锁,如果加锁失败,不会阻塞,会直接返回。
int pthread_mutex_unlock(pthread_mutex_t *mutex);
- 解锁
*/
#include 3.13 条件变量
当缓冲区为空,不用条件变量时,消费者处于无意义的循环,此时只执行加锁和解锁,直到时间片完才发生线程切换,浪费cpu资源。而加入条件变量,一旦发现缓存区是空的,会立刻从运行态进入阻塞态,此时一定会发生线程切换,把cpu资源让出。互斥锁和条件变量都可以实现线程同步,但使用条件变量效率更高。
/*
条件变量的 类型 pthread_cond_t
int pthread_cond_init(pthread_cond_t *restrict cond, const pthread_condattr_t *restrict attr);
int pthread_cond_destroy(pthread_cond_t *cond);
int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex);
- 等待,调用了该函数,线程会阻塞。
int pthread_cond_timedwait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex, const struct timespec *restrict abstime);
- 等待多长时间,调用了这个函数,线程会阻塞,直到指定的时间结束。
int pthread_cond_signal(pthread_cond_t *cond);
- 唤醒一个或者多个等待的线程
int pthread_cond_broadcast(pthread_cond_t *cond);
- 唤醒所有的等待的线程
*/
#include 3.14 信号量
/*
信号量的类型 sem_t
int sem_init(sem_t *sem, int pshared, unsigned int value);
- 初始化信号量
- 参数:
- sem : 信号量变量的地址
- pshared : 0 用在线程间 ,非0 用在进程间
- value : 信号量中的值
int sem_destroy(sem_t *sem);
- 释放资源
int sem_wait(sem_t *sem);
- 对信号量加锁,调用一次对信号量的值-1,如果值为0,就阻塞
int sem_trywait(sem_t *sem);
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);
int sem_post(sem_t *sem);
- 对信号量解锁,调用一次对信号量的值+1
int sem_getvalue(sem_t *sem, int *sval);
sem_t psem; //生产者消费变量
sem_t csem; //消费者信号变量
init(psem, 0, 8);
init(csem, 0, 0);
producer() {
sem_wait(&psem);
sem_post(&csem)
}
customer() {
sem_wait(&csem);
sem_post(&psem)
}
*/
#include 第四章 linux网络编程
4.12 IP地址转换
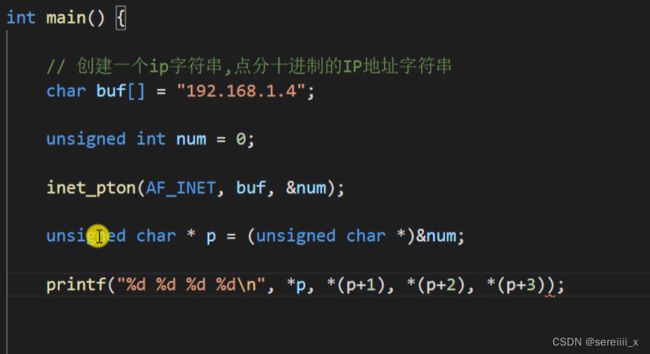
把int类型中的四个字节分别传给char类型指针
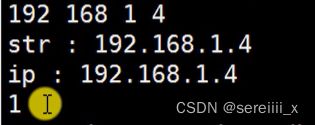
将点分十进制的IP地址转换成网络字节序的整数
输出如下:
因为转换成网络字节序是大端序,高地址存放低字节数,p是地址,p+3是高地址
![]()
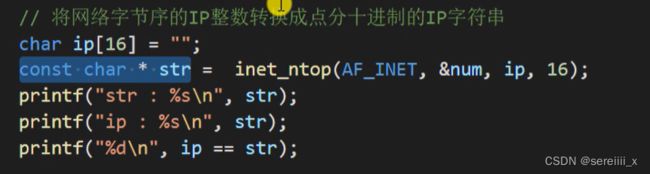
printf (“%s”,str ); / / 从首地址str一直输出,一直到 \0结束,没有\0就会越界。
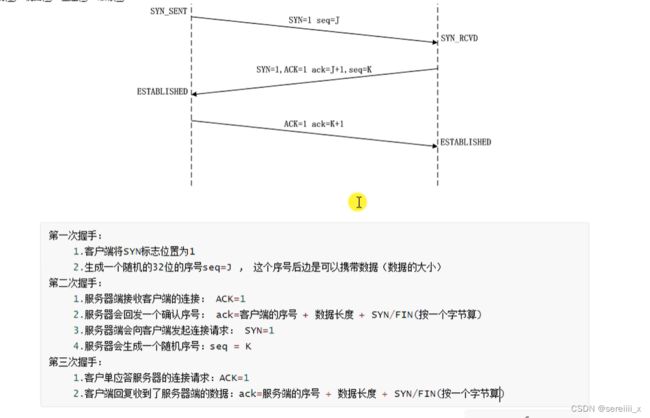
4.17 TCP三次握手
4.19 TCP四次挥手

4.20 多进程实现并发服务器1

4.21 多进程实现并发服务器2
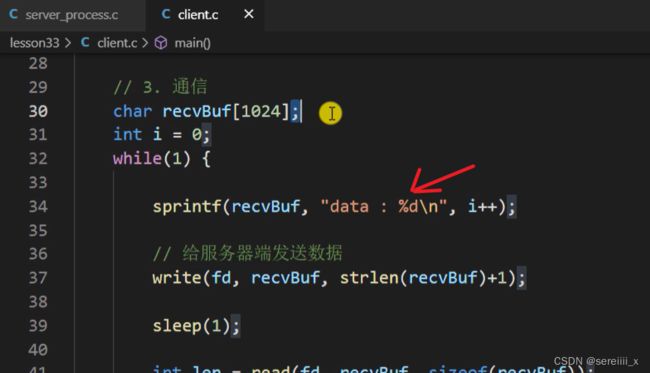
服务器在发送的时候并没有发送\n
所以在发送数据的时候,在strlen后面加1,把\n发送过去。或者可以初始化char数组的时候放一个0值,但是初始化会产生一个问题,如果两次发送的数据长度不一样,比如第二次发送的数据比第一次发送的短,那么char数组的后面一部分就不会被覆盖,发送过去的数据是会存在问题的
服务器的accept在捕获到sigchld信号之后产生软中断,会导致这个accept函数产生一个错误,并且不阻塞,所以会执行下面if里面的代码

解决办法:

4.22 多线程实现并发服务器
在创建结构体保存要传入子线程的参数时,这是一个局部变量,当下一次while循环时,它就消失了,所以可以使用malloc将其创建在堆中,但是在子线程中还需要释放掉。但是这样做资源消耗是非常大的,当来了很多个子线程时,要申请很多个堆区内存
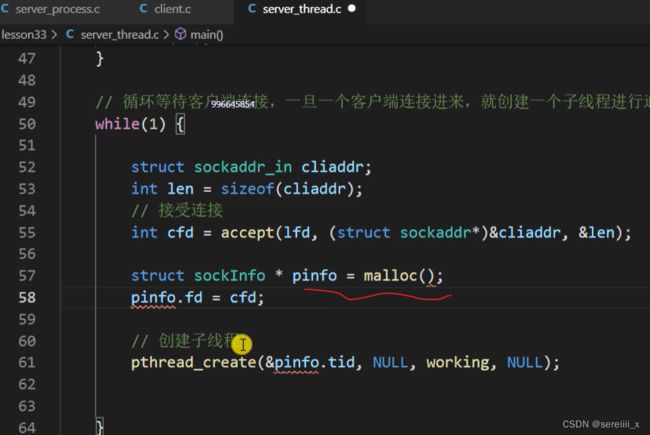
解决办法:创建一个结构体数组sockinfos,然后在main函数里面对结构体数组进行初始化,文件描述符需要初始化为-1,代表这是可用的结构体,在创建子线程之前先判断哪一个结构体是可用的,如果128个客户端都被用了,则睡眠、i-1,直到有可用的文件描述符
#include 4.25 IO多路复用
IO指的是文件和内存之间进行写入和读出
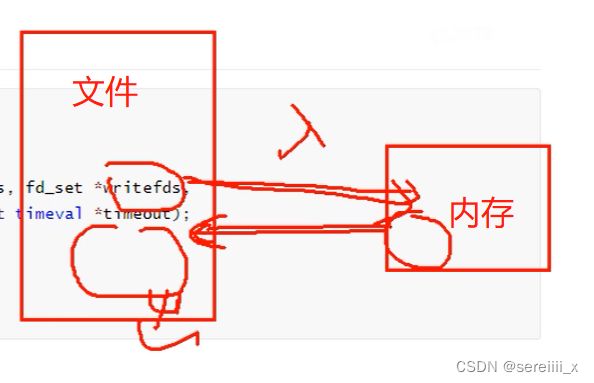
这里的IO是指对缓冲区的操作

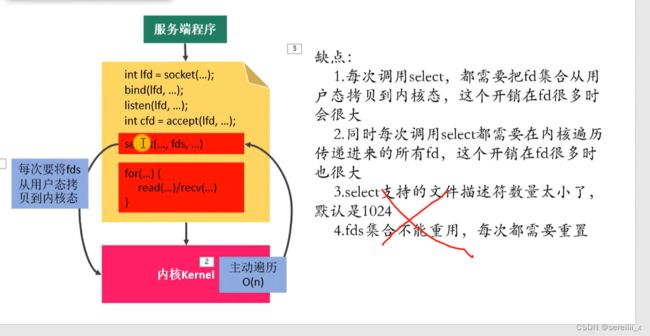
4.27 select
select每次调用的时候都需要重新设置
在while循环里面调用的其实是副本,因为内核处理过后可能会把本来是1的位置设置为0,但其实这些位还是需要检查的

4.28 poll
poll里面使用了结构体,内核每次修改的其实是结构体的revents,不会修改fd,这样就会比select好
不过poll还是需要从内核态转到用户态,用户态转到内核态,并且进行循环遍历

这里就是既检测读又检测写
![]()
poll相当于把select的第三点和第四个缺点给去掉了
————————————————————————
注意结构体0号是存放了监听文件描述符,所以后面的循环都是从1号开始循环的
#include 4.30 epoll代码编写
#include 4.31 epoll的两种工作模式
注意:EAGAIN只有设置为非阻塞的情况下才会产生
Linux下EAGAIN宏的含义:
从字面上来看,是提示再试一次。这个错误经常出现在当应用程序进行一些非阻塞(non-blocking)操作(对文件或socket)的时候。例如,以O_NONBLOCK的标志打开file/socket/FIFO,如果你连续做read操作而没有数据可读。此时程序不会阻塞起来等待数据准备就绪返回,read函数会返回一个错误EAGAIN,提示你的应用程序现在没有数据可读请稍后再试。
又例如,当一个系统调用(比如fork)因为没有足够的资源(比如虚拟内存)而执行失败,返回EAGAIN提示其再调用一次(也许下次就能成功)。
ET模式下的代码
epoll_et.c
#include 第五章 实战
5.1 阻塞和非阻塞、同步和异步
有些错误并不是程序当中的错误
注意非阻塞的size==-1的出错情况,或产生EAGIN或EWOULDBLOCK
阻塞情况下产生EINTR
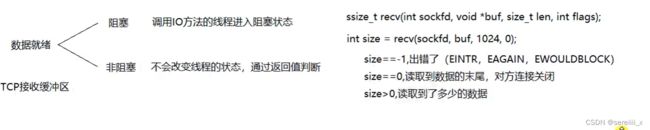
同步就是recv函数阻塞在那里,必须等到内核中的数据全部输入到buf中后才可以执行下面的代码
异步是把这些事情交给内核去做,然后去做自己的事情
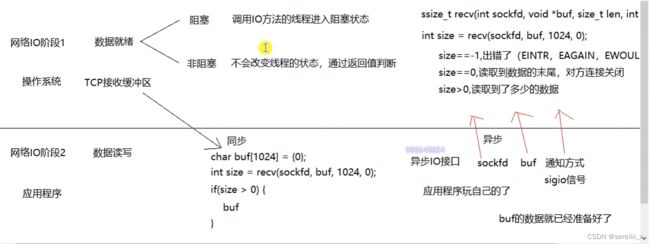
异步一般是和非阻塞搭配使用
异步程序非常复杂,而且容易出错,建议使用IO复用和非阻塞
5.7 解析http请求报文

根据主状态机的信息去判断要解析哪一部分,是解析头还是解析什么