【OpenCV】图像变换(四-1)-霍夫变换线段检测
霍夫变换是一种在图像中寻找直线、圆及其他形状的方法。原始的霍夫变化是一种直线变换,即在二值图像中寻找直线的一种相对快速方法,变换可以推广到其他普通的情况,而不仅仅是简单的直线。在这篇博文中,我们先对霍夫变换的线段检测讨论下。
(1)霍夫变换的线段检测理论
如下图所示,在直角坐标系中有一条直线l,原点到该直线的垂直距离是ρ,垂线与X轴的夹角θ,则这条直线是唯一的,且其方程为:
![]()
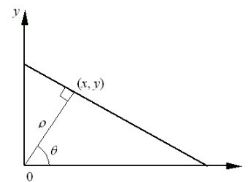
而这条直线用极坐标表示为(ρ,θ),可见直角坐标系中的一条直线对应着极坐标下的一点,这种线到点的变换就是Hough变换。
在直角坐标系中,过任意一点(x0,y0)的直线系,如下图所示,满足
![]()
其中:
![]()

而这些直线在极坐标系中所对应的点(ρ,θ)构成一条正弦曲线,反之,在极坐标系中在这条正弦曲线上的点均对应着直角坐标系中过(x0,y0)的一条直线,如图所示:
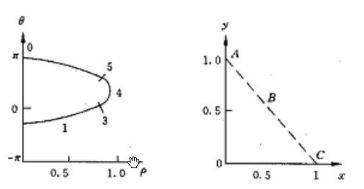
设平面上有若干点,过每点的直线系分别对应于极坐标系上的一条正弦曲线,若这些正弦曲线有共同的交点(ρ’,θ’),如图所示,这些点共线,且这些点对应的直线方程为:
![]()

这就是Hough变换检测直线的原理。
在OpenCV中给出了相关的基于霍夫变换的线段检测函数cvHoughLines2(),下面简要介绍下这个函数的各个参数意义。
CvSeq* cvHoughLines2(
CvArr* image,//输入图像,必须为8位的二值图像
void* line_storage,//指向保存结果位置的指针
int method,//CV_HOUGH_STANDARD、PROBABILISTIC等
double rho,
double theta,//rho,theta是设置直线的分辨率,单位分别为像素和弧度
int threshold,//一条直线在累计平面中必须要达到的值
double param1=0,
double param2=0
)上面这个函数返回的结果是一个指向内存块的指针,所以在画出检测到的直线时,要遍历这个序列。下面给出这个程序的示例。
(2)程序示例及运行结果
#include运行的结果如下: