自动驾驶之PID原理简述(简单易懂)
文章目录
- 1. PID系统框图
- 2.PID优点
- 3. PID在车道保持中的应用
-
- 3.1 P控制
-
- 3.1.1 P控制的特征
- 3.2 PD控制
-
- 3.2.1 D控制的特点
- 3.3 PID控制
-
- 3.3.1 I控制的特征
- 总结
- 参考文献
-
- 车道保持辅助系统PID算法 [Adamshan-无人驾驶系统-PID](http://t.csdn.cn/tERbq)
- 声明
1. PID系统框图
PID就是指 比例(proportion)、积分(integral)、微分(derivative),这三项使用跟踪误差来产生控制指令,整个流程如下图所示: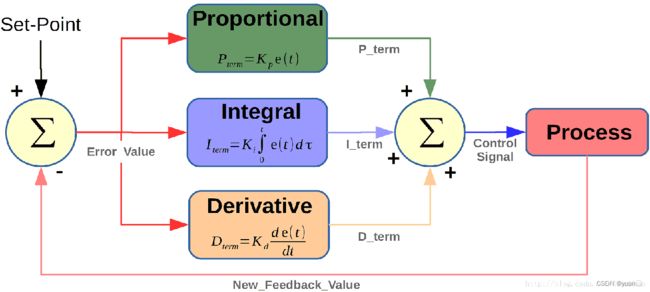
2.PID优点
PID控制具有以下优点:
- 原理简单,使用方便。
- 适应性强,可以广泛应用于化工、热工、冶金、炼油以及造纸、建材等各种生产部门。
- 鲁棒性强,即其控制品质对被控对象特性的变化不大敏感。
- 对模型依赖少,按 PID控制进行工作的自动调节器早已商品化。
3. PID在车道保持中的应用
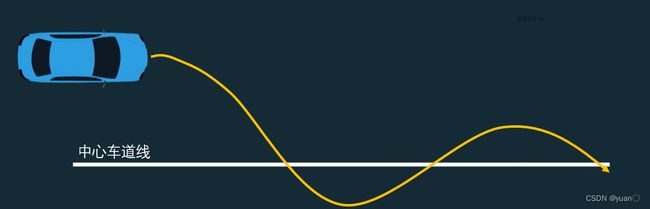
在行车过程中,若只是保持转向角一定,就会以下图的方式行驶,显然不符合正常行车感受。
3.1 P控制
使用 CTE(Cross Track Error)作为偏差度量 ,CTE就是车到参考线的距离: s t e e r i n g a n g l e = K p ⋅ e ( t ) {\rm{ steering angle = Kp}} \cdot {\rm{e(t) }} steeringangle=Kp⋅e(t) 其中的 e(t)就是在t时刻的CTE.
在合理的数值范围内 Kp越大控制的效果越好(越快速的回到参考线附近)。
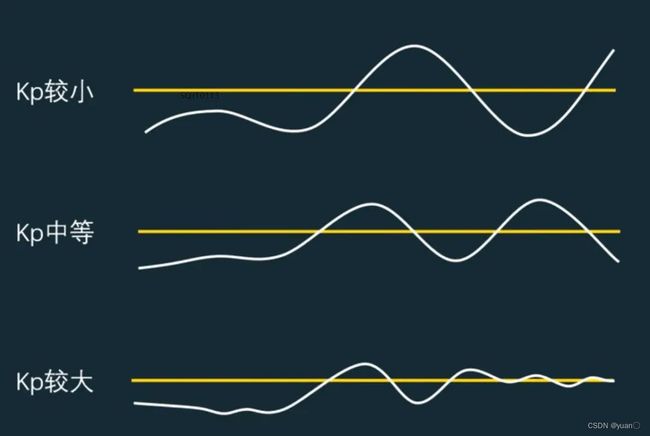
但是,当本身位置和参考线相距很远且 Kp系数较大的时候,就会出现车辆失去控制的情况:
3.1.1 P控制的特征
比例调节的显著特点就是有差调节。
- 如果采用比例调节,则在负荷扰动下的调节过程结束后,被调量不可能与设定值准确相等,它们之间一定有残差。
- 因为根据比例调节的特点,只有调节器的输入有变化,即被调量和设定值之间有偏差,调节器的输出才会发生变化。
所以说,如果 Kp 参数设计合理的话,P控制要比固定控制要更好,但是还是不能控制的很好,因为P控制的车辆容易受0值的影响。
此时车辆虽然在参考线上,但是并不是我们希望的状态(它在下一刻就会偏离),但是对于P控制而言,这是理想状态,此时控制转角为0,因此,P控制会一次又一次的超过参考线,即发生超调(overshot),为了矫正超调,我们需要考虑一个额外的误差项——CTE变化率。
3.2 PD控制
CTE的变化率描述了无人车向着参考线方向移动的有多快,现在的控制输出就变成了比例项和导数项求和的形式: s t e e r i n g a n g l e = K P ⋅ e ( t ) + K D ⋅ d e ( t ) d t steeringangle = {K_P} \cdot e(t) + {K_D} \cdot \frac{{de(t)}}{{dt}} steeringangle=KP⋅e(t)+KD⋅dtde(t) 其中的 Kd的大小决定了CTE变化率对于反馈控制的影响。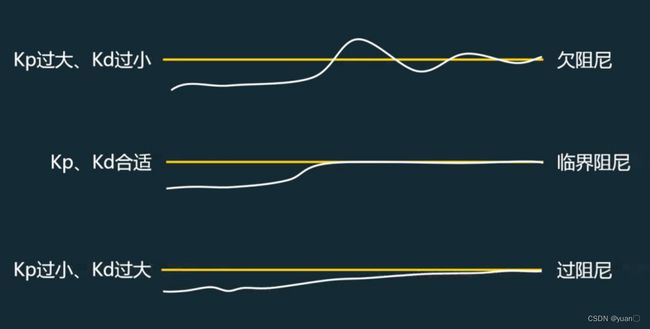 直观上来看,增大 P系数将会增大无人车向着参考线方向运动的倾向;增大 D系数将会增大无人车快速向参考线方向的运动的“抵抗力”从而使得向参考线方向的运动变得更加平滑。
直观上来看,增大 P系数将会增大无人车向着参考线方向运动的倾向;增大 D系数将会增大无人车快速向参考线方向的运动的“抵抗力”从而使得向参考线方向的运动变得更加平滑。
使用过大的 P系数,过小的 D系数的系统我们称之为欠阻尼的,这种情况的无人车将沿着参考线震荡前进;
反之,如果P系数过小,D系数过大,那么我们称之为过阻尼的,这将使得无人车要较长的时间才能纠正其误差。
PD控制似乎已经能够胜任良好的反馈控制了,但其实还不够,PD控制器可以保证正常的控制的需求,但是当环境存在扰动的时候,比如说下面这种情况: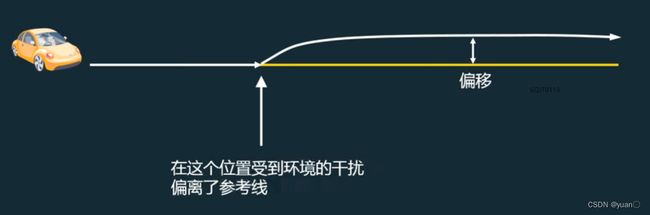
车辆在受力发生轻微偏移后,由于PD控制器中的P项倾向于向参考线方向运动,而D项则尝试抵消这样倾向,造成无人车始终都无法沿着参考线运动,这个问题称为稳态误差(steady state error)。
3.2.1 D控制的特点
P和I是根据已经形成的被调参数与给定值之偏差而动作(即偏差的方向和大小进行调节)。
微分调节是根据偏差信号的微分,即偏差变化的速度而动作的。
- 只要偏差一露头,调节器就立即动作,以求更好的调节效果
- 偏差没有变化,微分调节不起作用。
微分调节主要用于克服调节对象有较大的传递滞后和容量滞后。
注意:
微分调节不能消除余差。
微分调节只对偏差的变化做出反应,而与偏差的大小无关。
单纯的微分调节器也是不能工作的。
实际的调节器都有一定的失灵区,若调节误差的变化速度缓慢,以至于调节器不能察觉,纯微分调节器将不会动作,此时调节误差会不断累积却得不到校正。
3.3 PID控制
将积分项也引如到控制输出函数中,无人车的转角可以表示为: s t e e r i n g a n g l e = K P ⋅ e ( t ) + K D ⋅ d e ( t ) d t + K I ∫ e ( t ) d t steeringangle = {K_P} \cdot e(t) + {K_D} \cdot \frac{{de(t)}}{{dt}} + {K_I}\int {e(t)} dt steeringangle=KP⋅e(t)+KD⋅dtde(t)+KI∫e(t)dt KI 是积分项系数。引入KI是为了消除累计偏差——车的实际路线到参考线的图形的面积。 同样的,这里的积分项系数的大小也会影响我们整个控制系统的稳定性,过大的KI会使控制系统“震荡”地运行,过小的KI又会使控制的车辆在遇到扰动以后(处于steady state)要很久才能回到参考线上,这在某些情况下势必会使车辆处于一个危险的境况。
同样的,这里的积分项系数的大小也会影响我们整个控制系统的稳定性,过大的KI会使控制系统“震荡”地运行,过小的KI又会使控制的车辆在遇到扰动以后(处于steady state)要很久才能回到参考线上,这在某些情况下势必会使车辆处于一个危险的境况。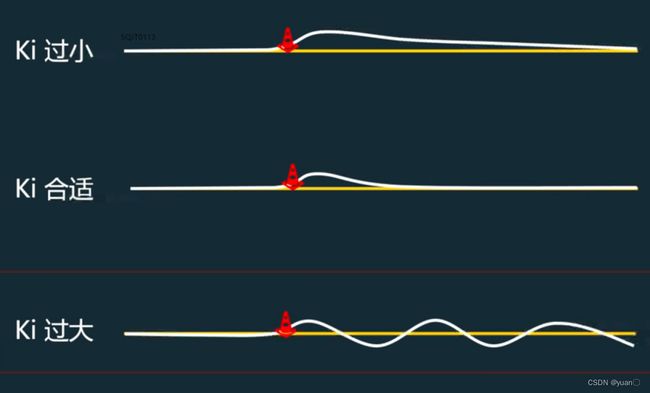
3.3.1 I控制的特征
积分调节的特点是无差调节。
只要偏差不为零,控制输出就不为零,它就要动作到把被调量的静差完全消除为止 而一旦被调量偏差e为零,积分调节器的输出就会保持不变。调节器的输出可以停在任何数值上,即:
被控对象在负荷扰动下的调节过程结束后,被调量没有余差,而调节阀则可以停在新的负荷所要求的开度上。
积分调节的滞后性:
对于同一个被控对象,采用I调节时其调节过程的进行总比采用P调节时缓慢,除非积分速度无穷大,否则I调节就不可能像P调节那样及时对偏差加以响应,而是滞后于偏差的变化,它的滞后特性使其难以对干扰进行及时控制。
所以一般在工业中,很少单独使用I调节,而基本采用PI调节代替纯I调节。
比例调节和积分调节的比较:
- 比例调节是有差调节,积分调节是无差调节
- 比例调节能立即响应偏差变化,积分调节调节过程缓慢
当被调参数突然出现较大的偏差时
- 比例调节能立即按比例把调节阀的开度开得很大
- 但积分调节器需要一定的时间才能将调节阀的开度开大或减小
- 如果系统干扰作用频繁,积分调节会显得十分乏力
单独的积分调节系统较罕见,它作为一种辅助调节规律与比例调节一起组成比例积分调节规律。
总结
PID控制律蕴涵了动态控制过程中的过去、现在和将来的信息。
- P代表当前的信息,起纠正偏差的作用,使过程反应迅速;
- D代表将来的信息,在信号变化时有超前控制作用,使系统的过渡过程加快,克服振荡提高系统的稳定性;
- I代表了过去积累的信息,能消除静差,改善系统静态特性。
参考文献
车道保持辅助系统PID算法
Adamshan-无人驾驶系统-PID
声明
本人所有文章仅作为自己的学习记录,若有侵权,联系立删。