点云中平面的精确识别和轮廓线提取
点云中平面的精确识别和轮廓线提取
文章目录
- 1、背景
- 2、"基于3D Hough变换的表面生长分割" 原理
- 3、点云智绘软件的算法实现
- 4、案列分享
1、背景
激光雷达(Light Detection and Ranging,LiDAR)测量技术是一种新颖的测量手段,其新颖既表现在其获取数据的原理和方式不同,又表现在其获取数据的组织方式和表达手段也区别于已有的其他测量手段。具体而言,激光雷达扫描仪向被测量的地表发射激光信号,信号既会打在地面、又会打在地物上;激光雷达扫描仪记录反射回来的激光信号,这些信号经过后续的处理和解算生成一系列的离散点。因为这些离散点成星云状密集分布,所以形象的称为点云(Point cloud)。激光点云这种成果,既不同于经典的摄影测量获取的光学影像,又不同于SAR获取的经过成像处理的复数数据,是一种新颖的数据组织形式。
点云数据处理和信息提取中使用的基本处理单元,被称为“基元”。按照基元类型,可以将已有的方法划分为基于点、剖面、体素、对象、多基元融合(如图1所示)等5类点云信息提取方式。其中,对象是由点云分割这个特殊的点云处理方式获取的基元;同时,不同的点云分割方法获取的对象也千差万别,有平面、光滑曲面、球状、杆状等不同几何形态的对象。另外,对象往往对应地理世界中的一个地理实体或者实体的一部分。比如,一个对象可能是一栋建筑物,也可能是建筑物房顶的一个面片。因此,对象有时也被成为实体。
 (a)点
(a)点
![]() (b)剖面
(b)剖面
 (c)体素
(c)体素
 (d)对象
(d)对象

(e)某一地面对象及其提取的关键点
图1 点、剖面、体素、对象、关键点等多种基元的示意图
2、“基于3D Hough变换的表面生长分割” 原理
目前,已有众多的点云的分割方法。其中,2004年,国际知名的激光雷学者Vosselman及其研究团队提出了一种基于3D Hough变换的表面生长算法,用于激光雷达点云的中平面和光滑曲面的识别。众所周知,2D Hough变换被科研和工程领域应用于检测2D空间的直线。相应的,3D Hough变换是2D Hough变换向3D空间的空间,可被应用于检测3D空间的平面,如图2所示。基于3D Hough变换的表面生长算法本质上是图像分割领域的区域生长算法在点云这种特殊结构数据上的拓展。

(a)三维空间中共面的三个离散点

(b)与图(a)对应的3D Hough特征空间,每个原始点对应3D Hough特征空间的一个正弦曲面,且三个正弦曲面交与一点
图2 3D Hough变换和3D空间某一平面的检测
3、点云智绘软件的算法实现
点云智绘(PCA)软件率先将“基于3D Hough变换的表面生长”算法进行了商业化实现,其所需参数界面如图3所示。并且,PCA可以在分割的基础上输出每一个平面实体的3D轮廓信息。

图 3 点云智绘软件中“基于3D Hough变换的表面生长”界面
4、案列分享
试验采用的电脑为一台配备了64G内存、32核CPU、64位操作系统的Dell Precision T7610工作站。
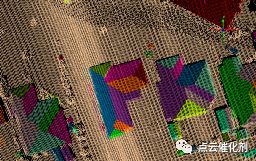
采用了三景点云数据进行试验,试验数据的基本情况见表1。三个试验数据及其“基于3D Hough变换的表面生长”的平面分割结果分别如图4、图5、图6所示。
表1 试验数据的基本情况

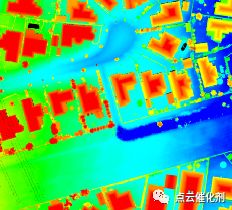
(a)原始数据(顶视图)

(b)分割(平面)结果(顶视图)

(c)分割(平面)结果(透视图)
(d)局部方法结果(顶视图)

(e)局部方法结果(透视图)
图 4 试验数据一及其分割(平面)结果
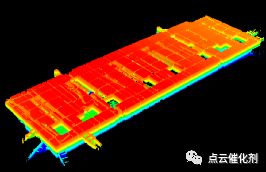
(a)原始数据(透视图)

(b)分割(平面)结果(顶视图)

(c)分割(平面)结果(透视图)
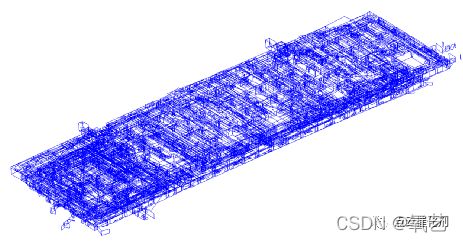
(d)矢量化结果(透视图)
图 5 试验数据二及、分割(平面)结果及矢量化结果

(a)原始数据(透视图)

(b)分割(平面)结果(透视图)

(c)局部放大的分割(平面)结果(透视图)

(d)矢量化结果(透视图)

(e)局部的矢量化叠加到分割结果(透视图)
图 6 试验数据三及、分割(平面)结果及矢量化结果
众多试验数据的分割结果表明,PCA软件中的“基于3D Hough变换的表面生长”可以高精度的识别点云数据中的平面和光滑曲面。而且具有下述特点:
(1)平面和光滑曲面的识别精度很高,但是相对比较耗时。
(2)对于平面识别,可以精确的识别每一个点所在的最优平面,确保面与面相交处的点被划分到最优的平面,如图6(c和e)所示。
(3)适用于泛在点云。对机载、车载、地基激光雷达点云及其影像密集匹配点云均有良好的适用性。
(4)算法对数据量不敏感。在计算机内存足够的情况下,算法不限定单个点云文件包含点的数量。即,算法处理的单个点云文件的大小受内存大小的限制、而不受算法本身的限制。
(5)算法对参数的取值不敏感。参数的取值与点云的密度、精度的关联相对较大;但在点云数据的密度和精度确定的情况下,使用同样的参数值可以对不同场景的点云数据均取得较好的分割效果。
(6)支持批量处理。配置好相应的文件后,可以实现对点云数据集的批量处理。
(7)点云分割成果可以方便的导入其他的商业或者开源点云数据处理分析软件中浏览、编辑。
(8)可以同时输出分割结果的轮廓线。